

1.4 Последовательность синтеза синхронных управляющих автоматов
Любой автомат может быть реализован в виде автомата на жесткой или гибкой логике. Последовательность синтеза автоматов с жесткой логикой следующая:
выбор типа элементов памяти;
кодирование состояний автомата, входных и выходных сигналов в структурном алфавите;
детализация блока памяти;
составление расширенной структурной таблицы переходов и выходов;
канонический синтез логического преобразователя;
минимизация функций выходов и возбуждения блока памяти.
2 Анализ граф схемы алгоритма суа и детализация бп
2.1 Исходные данные и задание на курсовую работу
Требуется синтезировать управляющий автомат типа Мили. Работа автомата задана его ГСА. При проектировании,которого состояния кодируются первым эффективным способом. Блок памяти реализуется с использованием Т-триггеров.
Для применения общепринятых методов синтеза исходную постановку задачи необходимо формализовать, т.е. привести ее к каноническим формам описания управляющих автоматов. Обычно при проектировании используется методика синтеза микропрограммных управляющих автоматов, основанная на использовании граф-схем алгоритмов (ГСА). В задании на курсовой проект была предложена ГСА, представленная на Рисунке 4.

Рисунок 4 - ГСА синтезируемого автомата
ГСА относится к начальным языкам описания алгоритма функционирования управляющего автомата. Характерной особенностью начальных языков является то, что они не позволяют в явном виде задать функцию переходов. Поэтому для дальнейшего синтеза управляющего автомата необходим переход от начального языка описания работы автомата (т.е. от ГСА) к какому–либо автоматному языку описания, например, к таблицам переходов и выходов. Для построения таблиц переходов и выходов необходимо произвести разметку ГСА.
Выходные сигналы, формирующиеся во время работы автомата имеют вид:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2.2 Разметка граф-схемы алгоритма
Функционирование абстрактного автомата может быть описано с помощью двух моделей - модели Мура и модели Мили, отличающихся принципами формирования выходных сигналов и числом внутренних состояний. Переход от алгоритмического описания к автоматному осуществляется путем разметки ГСА в соответствии с выбранной моделью абстрактного автомата. В задании на курсовой проект была предложена модель Мили.
Правила разметки ГСА при реализации автомата по модели Мили:
- символом начального состояния а1отмечается вход вершины, следующей за начальной, а также вход конечной вершины ГСА;
-входы всех вершин, следующих за операторными, отмечаются различными символами а2…аi…аn;
-входы вершин ГСА, следующих за операторными, должны быть отмечены только одним единственным символом аi.
Для циклически выполняемых алгоритмов за начальное состояние автомата может быть взято любое его допустимое состояние, которое выбирают произвольным образом и отмечают символом а1. Все последующие состояния такого (не инициального) автомата отмечаются символами а2…аi …аn. В не инициальных автоматах за начальное его состояние может быть взято любое из допустимых состояний автомата
Разметка ГСА по указанным правилам показана на Рисунке 5.
В результате разметки ГСА по указанным правилам удается определить множество внутренних состояний УА (формула 1), определяющих мощность этого множества
![]() (1)
(1)
Так,
для данной ГСА мощность равна
![]() .
.
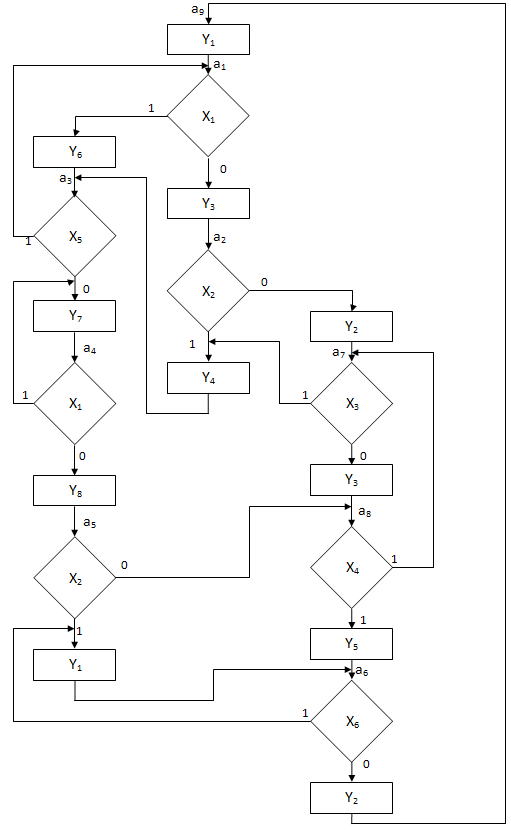
Рисунок 5 - Размеченная ГСА синтезируемого автомата