

1. Общие указания по выполнению работы
1.1. Цель работы
Исследовать профили кулачков для кулачковых механизмов с поступательно движущимся и качающим толкателем. Определить законы движения толкателя, его
15
функцию положения и проанализировать их в зависимости от угла поворота кулачка. Освоить методику расчета контактных напряжений, возникающих между кулачком и роликом толкателя , провести выбор материалов для кулачковых механизмов с учетом условия прочности.
1.2. Общая характеристика работы
Основным содержанием практической работы является исследование законов движения кулачковых механизмов с поступательным и вращательным движениями кулачка , построение профилей кулачков и расчет контактных напряжений между роликом толкателя и кулачком. При исследовании механизмов используется лабораторный стенд, ранее применяемый при выполнении лабораторной работы № 1. Фактически кулачковый механизм связан с исполнительным устройством, обуславливающим перемещение частей цилиндрического СВЧ волновода. Рассмотрены вопросы расчетов кулачковых механизмов разных типов, определены перемещения, скорости и ускорения выходного звена по заданному закону движения входного звена и форме профиля кулачка. Нормальная работа кулачкового механизма возможна лишь при непрерывном контакте толкателя с кулачком. Это достигается геометрическим или силовым замыканием. В работе анализируются различные законы движения толкателя: равномерное, равнопеременное и синусоидальное, рассмотрены вопросы выбора радиуса ролика толкателя и расчеты на прочность. В процессе работы необходимо соблюдать общие правила по технике безопасности при работе с электроустановками с напряжением до 1000 В.
2. ДОМАШНИЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ
УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Изучить основные законы движения и
16
классификацию кулачковых механизмов, в заготовку отчета занести основные виды кулачковых механизмов.
Методические указания по выполнению первого задания
При выполнении задания изучить материал /1, с. 319 - 332; 2, с. 225 -227; 3, с. 88 - 90/. Анализируя задание, следует учитывать, что кулачковые механизмы предназначаются для воспроизведения заданного закона движения рабочих звеньев или для сообщения им требуемых перемещений с остановами заданной продолжительности. Кулачковые механизмы образуются путем силового замыкания звеньев: кулачка и толкателя (коромысла). Кулачок обычно представляет собой диск (или цилиндр), профиль которого очерчен определенной кривой, которая строго задает движение толкателю. В зависимости от вида движения сопряженное с кулачком звено называется либо толкателем (рис. 1 а, 1 б), либо коромыслом (рис. 1 в, 1 г). Кулачок и коромысло соединяют со стойками с помощью вращательных пар с поступательной парой. Для уменьшения потерь на трение толкатель или коромысло снабжают цилиндрическими роликами. Конструктивно силовое замыкание звеньев осуществляется за счет сил упругости - предварительно деформированной пружины. Механизмы используют для преобразования вращательного (рис. 1 а, 1 в) или возвратно-поступательного движения (рис. 1 б) входного звена 1 в возвратно-поступательное (рис. 1 а, 1 б) или возвратно-вращательное (рис. 1 в) движение выходного звена 2 даже с остановками заданной продолжительности. Кулачковые механизмы можно классифицировать следующим образом (рис. 1).Наибольшее распространение получили механизмы с вращающим кулачком (рис. 1 а, 1 в). При повороте кулачка 1 на угол φ толкатель 2 (рис. 1 а) перемещается на величину S. В зависимости от профиля кулачка перемещение S может быть разной функцией угла поворота ψ,
17
S = S(φ). Для кулачкового механизма с качающим толкателем поворот кулачка 1 на угол φдает угловое перемещение ψ, т.е. ψ=ψ(φ). На рис. 2 приведена диаграмма перемещения толкателя как функции угла поворота кулачка.


Рис. 1. Кулачковые механизмы: а - вращательный кулачок и возвратно-поступательно движущийся толкатель; б - возвратно-поступательно движущийся кулачок и толкатель; в - вращающийся кулачок и качающий толкатель;
г –пространственный кулачковый механизм
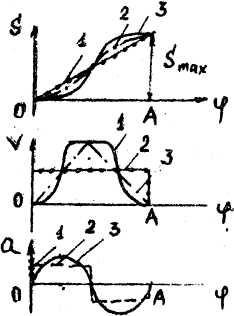
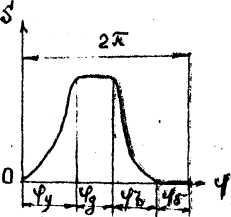
Рис. 2 Фазы удаления Рис. 3 Законы движения
18
При повороте кулачка на угол φу происходит подъем толкателя (фаза удаления). Затем во время поворота на угол φу толкатель останавливается - наступает фаза дальнего стояния. Следующая фаза - фаза возврата, во время которой толкатель возвращается в исходное положение (угол поворота φу) после чего останавливается в фазе ближнего стояния ( угол поворота φб) По назначению кулачковые механизмы можно разделить на функциональные, воспроизводящие заданный закон перемещения выходного звена, и позиционные - предназначенные для перемещении выходного эвена из одной позиции в другую строго определенное время. В первом случае задается закон перемещения толкателя, во втором - время прохождения каждой из четырех фаз (или углы φу, φб φб, φr), максимальное смещение Sмax толкателя и угловая скорость кулачка. Зависимость S = f (φ) получают двойным интегрированием выбранной функции изменения аналога ускорения
а = ω2·d2S/dφ2 .
Рассмотрим следующие законы движения толкателя; равномерное V = const, равнопеременное а = const и синусоидальное а = Sinφ (где V - скорость, а - ускорение).
На рис. 3 показаны графики перемещения, скорости и ускорения толкателя для периода его удаления (подъема) при равномерном (линии 1), равнопеременном (2) и синусоидальном (3) движениях. При равномерном движении наблюдается мгновенное изменение в точках 0 и А, что вызывает теоретически бесконечно большие значения ускорений толкателя это явление носит название жесткого удара. Из-за упругости звеньев ускорение толкателя 0 в А в действительности конечно, но силы в контакте кулачка и толкателя возрастают в 4 - 5 раз по сравнению с нормальным.
Это влечёт за собой вибрации и повышенный износ трущихся элементов звеньев. Учитывая это, равномерное движение толкателя может быть применено лишь в
19
тихоходных механизмах. При равномерном движении (линия 2) толкатель сначала совершает равноускоренное движение, а затем - равнозамедленное. Ускорения толкателя имеют конечное значение. Но при смене знака ускорения возникает так называемый мягкий удар из-за разрыва третьей производной перемещения толкателя; при мягком ударе силы в контакте возрастают в 2 - 3 раза. Из рассматриваемых законов наиболее совершенен синусоидальный график изменения ускорения, при котором наблюдается плавное безударное действие кулачкового механизма. Синусоидальный вид движения ведомого звена применяется при больших скоростях движения. Кроме рассмотренных типов, применяются и другие виды движения ведомого звена. Рассмотрим синусоидальный вид движения:
a = C1 sin t = C1 sin 2 t / T1 , (1)
где С1 - постоянная;
ω - циклическая частота, соответствующая полному изменению на участке φ1(Т), т.е. ω = 2π / T1. Тогда скорость V и перемещение S равны
v = C1 (sin 2 t / T1)dt + C2= - C1(cos 2 t /T1)T1/2 + C2 (2)
S = v dt = - C1(sin 2 t /T1) (T1/2)2 + C2 t + C3 (3)
Для определения постоянных , учтём начальные условия t = 0;
V = 0; S = 0, получаем Сз = 0. Тогда скорость и перемещение принимают вид
v = C1 T1/2 [ 1 - cos (2 t /T1) ] , (4)
S = - C1 T1/2 [ 1 - C1 (T1/2)2 sin (2 t /T1) ] (5)
20
Учитывая, что при t = T1, S = Sмах, находим
C1 = ( 2 - Sмах ) / ( T1 )2 и уравнения движения принимают вид:
a = 2 Smax / (T1)2 sin 2 t / T1 (6)
v = Smax / T1 [ 1 - cos (2 t /T1) ] (7)
S = Smax [ t / T1 - 1/2 sin (2 t /T1) ] (8)
Заменяя в выражении (8) переменную t переменной φ (φ = ωt, φу = ωТ1),получим при вращении кулачка с поступательно движущемся толкателем (рис 1а)
a = Smax [ / y - 1/2 sin (2 / y) ] (9)
Для кулачкового механизма с качающим толкателем имеем
ψ = ψmax [ / y - 1/2 sin (2 / y) ] (10)
где ψ - угловой ход толкателя.
Форма профиля кулачка зависит от закона перемещения толкателя S = S(t) или ψ = ψ(t). Найдем профиль кулачка для механизма с поступательно движущимся толкателем. На рис. 4 а представлен профиль АВ кулачка в начальном положении, когда S1 = 0. Пусть искомое уравнение профиля есть rj = гj(φ). Обозначим начальный радиус в исходном положении
ro = r(o) = ( So 2 + lo 2 ) 1/ 2. (11)
После поворота кулачка на угол φ острие толкателя переместится из точки А с координатами r = г0, и φ = 0 в точку В с координатами r1 и φ1. При этом толкатель поднимется на Si = АВ'. Тогда следует
rj = (lo 2 + (So + Sj)2 )) 1/ 2 (12)
21
или
rj = ( ro 2 + 2So Sj( ) + Sj2( ) ) 1/ 2 (13)
Это и есть искомое уравнение профиля для кулачка, заданное через параметр φ. Определяются по заданному закону движения величины перемещения (S) толкателя функции угла поворота (φ) кулачка, определяется профиль. В результате получают функции г = r(t) полностью определяющие профиль кулачка с поступательно движущимся толкателем. Для кулачкового механизма с качающим толкателем (рис. 4 б) формулы для расчета профиля кулачка имеют следующий вид;
rj = ( A2 + L2 – 2 ALcosj() ) 1/ 2 (14)
ro = ( A2 + L2 – 2 ALcoso(0) ) 1/ 2 (15)
В начале по заданному закону движения рассчитываются углы поворота толкателя φj в функции угла поворота кулачка ψ = ψ(φ). Затем по формулам (14) для ряда последовательных значений φ вычисляют радиусы вектора rj. В результате получаем таблицу rj и φj, соответствующим одному и тому же углу поворота кулачка φj , гj = г(φj). На рис. 4 даны схемы кулачковых механизмов с толкателем, оканчивающимся острием. Чтобы получить истинный профиль кулачка необходимо построить внутреннюю эквидистантную к теоретическому профилю кривую, удаленную от теоретического профиля на величину радиуса ролика
Задание № 2. Изучить расчеты на прочность кулачковых механизмов, в заготовку отчета занести условия прочности кулачка и ролика
Методические указания по выполнению второго задания
22
При выполнении задания изучить материал /1, с 332 - 333; 2, с. 231 -232/. При этом следует учитывать, что для кулачковых механизмов в зоне контакта кулачка с ведомым звеном возникают сложные явления, сопровождающиеся деформацией и износом поверхностных слоев.
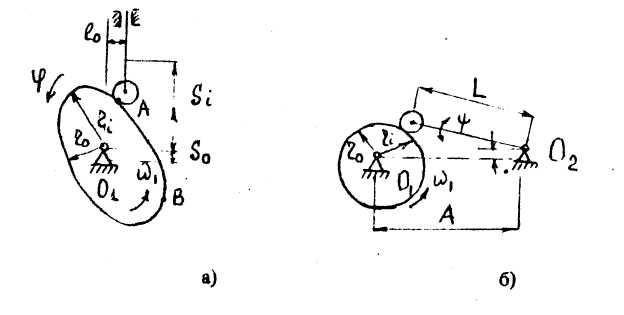
Рис. 4. Законы движения кулачка с поступательно движущимся (а) и качающим толкателем (б)
Износ трущихся деталей одна из главных причин снижения точности воспроизводимого движения. Кроме того, при чрезмерно больших напряжениях в зоне контакта может наступить усталостное выкрашивание частиц материала у поверхности деталей и их разрушение. В целях недопущения этого детали кулачкового механизма рассчитываются на износ, контактную прочность и износостойкость (долговечность). При действии нормальной силы в зоне контакта кулачка 1 и ролика 2 толкателя (рис 5) поверхностные слои этих звеньев деформируются, в результате чего образуется площадка контакта. Условие прочности кулачка и ролика может быть выражено зависимостью
k =0.399 ( F / b En / n ) 1/ 2 [ к ] (16)
23
где F - нормальная сила взаимодействия кулачка и ведомого звена (ролика); b -толщина кулачка (или ролика); Еn – приведенный модуль упругости материалов кулачка и толкателя равный
En = 2 E1 E2 / (E1 (1 - 22 ) + E1 (1 - 12 )) (17)
где E1, μ1, E2, μ2 - модули yпpyrocти и коэффициенты Пуассона кулачка и ролика;
ρn - приведенный радиус кривизны профиля кулачка (ρk) и ролика толкателя (гρ) в точке их контакта
= гρρ/(гρ+ρk) , (18)
[σи] - допускаемое контактное напряжение, например, для бронзового кулачка и стального ролика толкателя [σи]= 400 МПа. При вращении кулачка сила F и радиус кривизны профиля ρк непрерывно изменяются, поэтому и напряжения, определяемые по формуле (16), различны вдоль профиля кулачка. Для чугуна [σи] = 410 - 750 МПа, для стали [σи] = 600 - 1800 МПа. Существует связь между размерами высшей пары, экспериментально найденным коэффициентом износостойкости С и допустимым значением нормальной силы F:
F=C b / ( 1/ ρk ) . (19)
Значения С обеспечивают работоспособность профиля в течение 108 - 109 циклов
C = 5.73 ( [ к ]2 / En ) ( 20)
Износ по общей нормали
= 22 fпр2 ( [ к ]3 n1 ρk / ( b E12 ), (21)
где fпр - коэффициент трения; n1 - число циклов.
Если кулачок расположен на двухопорном валу, то
24
определяют стрелу прогиба вала под кулачком, нагруженным силой F по формуле
g = Fa2 b2 / (3EJl ) , (22)
где а, b - расстояние от точки приложения силы до опор данного участка вала; 1 - длина расчетного участка вала; E - модуль упругости.
J = π d4 / 64 , (23)
J - осевой момент инерции расчетного сечения вала;
d - диаметр вала.
Жесткость вала считается достаточной, если стрела прогиба у расчетного участка вала под действием силы F (рис. 6) не превышает значений g = 0,02 - 0,05 мм. Кулачок изготавливают из стали 50 и 40Х с закалкой ТВЧ рабочих по-верхностей по твердости 52 - 53 HRCэ , малоуглеродистых сталей 15Х, 20Х и 25Х с цементацией на глубину 0,5 - 1,5 мм и твердостью 56 - 62 HRCэ, при больших нагрузках кулачки изготавливают из стали 40Х и ШХ15 с термообработкой до твердости 51 - 63 HRCэ. Хорошую износостойкость обеспечивает применение хромоалюминиевых сталей 4СХЮ, 382МЮА.
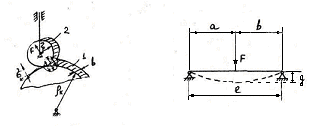
Рис. 5 Кулачок и толкатель, Рис. 6 Стрела прогиба
напряжения в зоне контакта
25
. Термообработка этих сталей (закалка, отпуск, нитрирование) придаст им высокую твердость (33 - 70 HRCэ).
Снижение износа может быть достигнуто рациональным подбором материалов трущихся деталей, обладающих низким коэффициентом трения и высокой износостойкостью.
На практике часто применяют следующие сочетания материалов: кулачок - закаленная сталь, толкатель - нейлон или толкатель (ролик) - закаленная сталь, кулачок - фосфористая бронза, пластики на основе термореактивных смол, кулачок –латунь, ролик – закаленная сталь.
Задание № 3. Изучить построение планов скоростей и ускорений для кулачкового механизма, в заготовку отчета занести основные векторные уравнения и планы.
Методические указания по выполнению третьего задания
План скоростей строится по ранее изложенным принципам графического кинематического исследования механизмов /1, с. 32 - 36; 2, с. 225 - 227/. Вектор скорости точки А2, принадлежащей звену 2 - толкателю, определяется из векторного уравнения VA2 = VA1+ VA1A2 , где VA1 = ωi OA - вектор скорости точки А1 принадлежащей звену 1 - кулачку, перпендикулярен радиусу-вектору OA, VA1A2 - вектор относительной скорости, параллелен касательной, проведенной к профилю кулачка в точке касания его с толкателем; ω1 - угловая скорость кулачка (рис. 7). Из полюса плана скоростей проводим в масштабе μ вектор скорости VA1. Из конца этого вектора проводим линию действия относительной скорости, а из полюса плана - линию действия абсолютной скорости толкателя, параллельную направлению движения толкателя. Пересечение этих линий действия определит искомую скорость VA2. План ускорений строится по тем же принципам, что и план скоростей. Точка А принадлежит как звену 1 (А1) так и звену 2.
26
aA2 = aA1 + aA1A2k + aA1A2n + aA1A2t
Ускорения, входящие в уравнение, вычисляются по формулаи
aA1 = 2 OA ; aA1A2n = (VA1A2)2 / ρk ; a A1A2k = 2 VA1A2 1 ,
где ρk - радиус кривизны кулачка в точке A
Направление поворотного (кориолисового) ускорения аА1А2k находим поворотом вектора Vа1а2 на 90о в сторону вращения
кулачка. Соответствующие отрезки планов скоростей и ускорений будут иметь вид
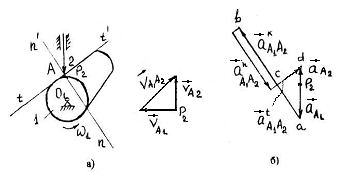
Рис. 7. Планы скоростей (а) и ускорений (б)
На плане ускорений от полюса Р2 откладываем вектор оа. Далее из точки а проводам отрезок ab, соответствующий вектору поворотного ускорения аА1А2, а из точки b проводим отрезок be, соответствующий ускорению aA1A2n. Последний отрезок совпадает с направлением поворотного ускорения и направлен от точки b к точке c. Из точки с проводим линию в направлении вектора aA1A2t до ее пересечения с od в направлении абсолютного ускорения аA2 точки А2, принадлежащей толкателю. Отрезок od • μ = аA2
27
3. ВОПРОСЫ К ДОМАШНЕМУ ЗАДАНИЮ
-
Что такое план скоростей и ускорений?
-
На каких теоремах основан метод планов?
-
Как строится план скоростей и ускорений для
кулачкового механизма с поступательным толкателем?
-
Как определяются контактные напряжения, формула
Герца-Беляева?
-
Какие существуют фазы движения толкателя?
6. В чем заключается кинематический анализ кулачкового механизма?
7. Какие существуют основные виды кулачковых
механизмов?
8. Для чего предназначаются кулачковые механизмы.
9. Как обеспечивается получение заданных законов
движения выходных звеньев кулачковых механизмов?
10. Как определяется профиль кулачка для механизма с поступательно движущимся толкателем?
4. ЛАБОРАТОРНЫЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Определить исходные начальные данные для кулачковых механизмов с поступательно движущимся и качающим толкателем.
Методические указания по выполнению первого задания
Рассмотреть схемы кулачковых механизмов и их связь с исполнительными устройствами, определить начальные данные lo, So, φo = 0 для поступательного толкателя и A, L, φo = 0 дня качающегося толкателя (рис. 8).
Результаты с рисунками занести в отчет.
28
Задание № 2. Определить закон движения ведомого звена и построить профиль кулачка для механизма с поступательно движущимся толкателем. Включив двигатель лабораторного стенда, рассмотреть перемещение волновода СВЧ, соединенного с толкателем кулачкового механизма.

Рис. 8 Кулачковые механизмы с поступательным (а) и вращательным (б) толкателем
Методические указания по выполнению второго задания.
Вращение кулачка осуществляется от механизма червячной передачи с нанесенным делительным диском, позволяющим измерять угол поворота через 10 °. Прижатие ролика толкателя к кулачку осуществляется с помощью упругой силы пружины. Включив двигатель, измерить положение толкателя Sj по перемещению волновода (в мм) в зависимости от утла поворота кулачка φ. Построить график зависимости S = S(φ). Рассчитать по формулам (11) - (13) гo и определить rj. При прохождении профиля кулачка для механизма с поступательно движущимся толкателем строят функцию r = r(φ) по заданному закону движения толкателя непосредственно. При этом следует учитывать, что радиус ролика толкателя целесообразно выбирать возможно большим
29
для уменьшения контактных напряжений износа. Но если радиус ролика Rр будет равен минимальному радиусу кривизны ρоаш центрового профиля, то на рабочем профиле получится острая точка. Дня исключения ее при выборе радиуса Rр должно выполняться условие Rр ≤ 0,7 ρоаш. Кроме того, для радиуса ролика и наименьшего радиуса ro кулачка нужно обеспечить соотношение Rp ≤ 0,4 ro. Величина Rp должна удовлетворять одновременно обоим условиям В заготовку отчета занести профиль кулачка и определить закон движения толкателя.
Задание № 3. Исследовать закон движения ведомого звена и построить профиль кулачка для механизма с качающим толкателем.
Методические указания по выполнению третьего задания
При определении профиля кулачка для механизма с качающим толкателем работа на лабораторном стенде происходит следующим образом. На делительной шкале 2 устанавливается нуль. Затем включают двигатель и отсчитывают максимальное изменение угла ψ качающего толкателя при вращении кулачка. Далее диск последовательно устанавливается на исходные углы φ по делительной шкале, а направляющая - на измеряемые углы ψ по шкале 3. Строится график зависимости ψ(φ). Рассчитать профиль кулачка rj воспользовавшись соотношением (14), фактически определяется геометрическое место центров роликов, представляющее собой теоретический профиль кулачка. Вычерчивается профиль кулачка с качающим толкателем и заносится в отчет. При выборе диаметра ролика толкателя пользуются теми же соображениями, которые рассмотрены в предыдущем задании. Обозначение делительных шкал 1,2 и направляющей 3 указано на лабораторном стенде.
30
Задание № 4. Провести расчеты на прочность и износостойкость кулачкового механизма, определить стрелу прогиба вала под кулачком.
Методические указания по выполнению четвертого задания.
При расчете на прочность кулачкового механизма следует воспользоваться формулой (15) и учесть, что нормальная сила взаимодействия кулачка и ролика толкателя F = 30 Н. Определить приведенный модуль Еп , считая кулачок и ролик толкателя, выполненными из материала стати с μ1 = μ1 = 0,3; E1 = Е2 = 2,1·105 МПа. Измерить радиус ролика и минимальный радиус кулачка, определить приведенный радиус ρn. Рассчитать по формуле (19) износостойкость кулачка и ролика. Определить стрелу прогиба у вала под кулачком, нагруженным силой F = 3 Н, воспользовавшись соотношением (22). Выяснить, является ли достаточной жесткость вала для заданной стрелы прогиба. Результаты расчета контактных напряжений, условие прочности, износостойкость кулачка и ролика, стрелу прогиба вала под кулачком занести в отчёт.
6. УКАЗАНИЯ ПО ОФОРМЛЕНИЮ ОТЧЕТА
Отчет оформляется в соответствии с требованиями, изложенными в методических указаниях к лабораторной работе .№ 1.
7. КОНТРОЛЬНЫЕ ВОПРОСЫ К ЛАБОРАТОРНЫМ ЗАДАНИЯМ
1. Как определяется профиль кулачка в механизме с качающим толкателем?
31
-
Какие материалы используются в качестве кулачка и
ролика толкателя в кулачковых механизмах?
-
Какую функцию положения имеют кулачковые меха-
низмы?
4 Что такое износостойкость кулачкового механизма и как она определяется?
5. Как рассчитывается стрела прогиба вала под кулачком?
6 Запишите основные формулы для расчета профилей кулачка с поступательно движущимся и качающимся толкателем?
7. По какому закону движения изменяется скорость и перемещение для синусоидального вида движения ускорения?
-
Из каких соображений выбирается радиус ролика
толкателя?
9. В каких случаях используются равномерное, равнопеременное и синусоидальное законы движения толкате-
ля?
10. Как определяются передаточные функции для кулачкового механизма?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Андреев И.В. Проектирование механизмов радиоэлектронных средств/ И.В. Андреев, А.И.Андреев.– Воронеж, ВГТУ, 2006.- 144 с.
2. Иосилевич Г.В. Прикладная механика./ Г.В. Иосилевич, Г.Б. Строганов, Г.С. Маслов.- М.: Высш. шк., 1989. -381 с.
3. Красковский Е.Я. Расчет и конструирование механизмов приборов и вычислительных систем / Е.Я. Красковский, Ю.А. Дружинин, Е.М. Филатова.- М.: Высш. шк.. 1991. -480 с.
32
4. Рощин Г. И. Несущие конструкции и механизмы РЭА/ Г. И Рощин.- М.: Высшая школа, 1981.-375 с.
5. Курсовое проектирование механизмов РЭС /под ред.
Г.И. Рощина.- М.: Высш. шк., 1991.- 246 с.