

1.2. Классификация кинематических пар по числу степеней свободы и числу условий связи
Класс пары. Свободное звено в пространстве обладает шестью степенями свободы. Звено, входящее в кинематическую пару, теряет от одной до пяти степеней свободы. Класс кинематической пары определяется числом условий связи S, налагаемых на относительное движение звеньев. Различают пять классов кинематических пар. Если Н - число степеней свободы звеньев кинематической пары, то:
S = 6 - H (1.1)
Например, в парах конструкции элементов позволяют осуществлять два независимых движения. Для них Н = 2 и S = 4, следовательно, эта пара - четвертого класса. Если одно вращательное движение Н = 1 и S = 5 - пара пятого класса.
Можно подобрать такую форму элементов пары, чтобы при одном независимом движении возникло второе - производное: в винтовой паре вращательное движение винта вызывает поступательное перемещение его вдоль оси. Такую пару следует отнести к пятому классу, т.к. имеется всего одно независимое движение (Н = 1).
Степень подвижности. Количество ведущих звеньев соответствует степени подвижности механизма W, т.е. степени свободы его относительно стойки. Если число подвижных звеньев плоского механизма n, число кинематических пар пятого класса - Р5, четвертого класса - Р4, то число возможных движений несоединенных в пары звеньев будет 3n, число условий связи, налагаемых парами пятого класса - 2Р5, парами четвертого класса - Р4 и, следовательно, степень подвижности механизма:
W = 3n - 2p5 - p4 - формула Чебышева (1.2)
Когда рассматривают подвижность пространственного механизма, пользуются формулой Сомова-Малышева:
W = 6n - 5p5 - 4p4 - 3p3 - 2p2 - p1 , (1.3)
где р1, р2, р3 - число пар первого, второго, третьего классов.
1.3. Избыточные связи и лишние степени свободы в механизме
В формуле Чебышева не отражены размеры звеньев. Специальным подбором размеров некоторых звеньев можно получить фактическую степень подвижности, отличающуюся от подсчитываемой по формуле (1.2).

а) б)
в) г)
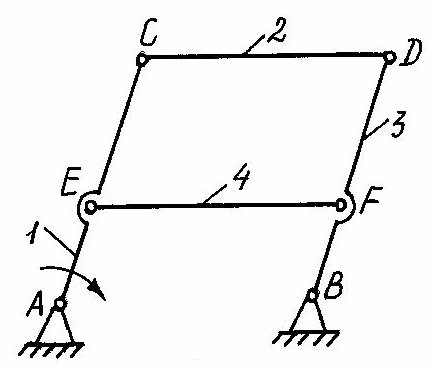
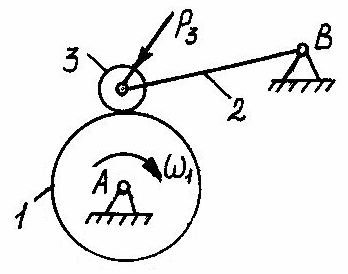
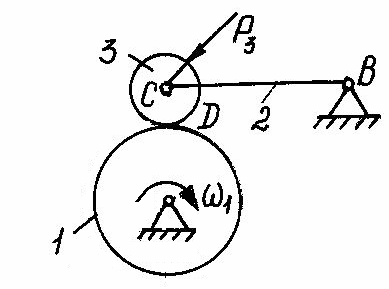
Рис. 1.3. Шарнирные и кулачковые механизмы
Например, в механизме, показанном на рис. 1.3, а, при наличии звена EF степень подвижности W = 3n - 2p5 - p4 = 34 - 26 - 0 = 0, но если принять дополнительное условие, касающееся размеров звеньев, а именно AB =º CD =ºEF (рис. 1.3, б) то, несмотря на то, что по подсчету по прежнему W = 0, фактически степень подвижности W = 1 и механизм будет работать. При этих условиях звено EF можно исключить и степень подвижности не изменится. Такие звенья, наличие которых не влияет на подвижность механизма, налагают пассивные или избыточные условия связи и называются пассивными. В механизмы они вводятся для увеличения жесткости, лучшего распределения нагрузки, создания определенности направления движения и т.д. Введение пассивных звеньев требует высокой точности выполнения элементов кинематических пар.
В механизме на рис. 1.3, в, W = 3n - 2p5 - p4 = 33 - 23 - 1 = 2. Вторую подвижность вносит звено 3 - некруглый ролик. Если ролик сделать круглым (рис. 1.3, г), то характер относительного движения коромысла 2 будет таким же, как и в том случае, если ролик сделать неподвижным. В этом смысле степень свободы, вносимая роликом, является "лишней". При закрепленном ролике n = 2, p5 = 2, p4 = 1 и W = 32 - 22 - 1 = 1.
Чаще всего звенья, создающие лишние степени свободы, вводят в механизм для улучшения условий работы, повышения КПД (замена скольжения качением) и т.д. При структурном анализе пассивные звенья и лишние степени свободы условно исключают.