

Трение качения.
Сопротивление движению при качении обусловлено эффектом молекулярного сцепления на площадке катящегося контакта, несовершенной упругостью реальных материалов и трением при относительном проскальзывании поверхностей в пределах нагруженного контакта, обусловленным разницей в кривизне обкатываемых тел и упругими микро перемещениями в пределах контактной площадки.
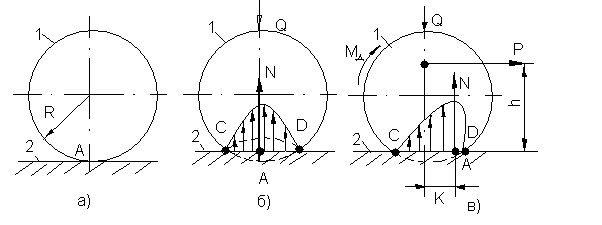
Рис. 4.3. Схема распределения сил, действующих на цилиндр:
а - без нагрузки; б) под нагрузкой в покое; в) под нагрузкой в движении.
В высшей кинематической паре, образованной звеньями 1 и 2 (рис.4.3,а) в статическом состоянии под нагрузкой Q возникает вследствие деформации площадки контакта CD, по которой действуют давления, распределённые по определённому закону (рис. 4ю3, б) При этом равнодействующая их N=Q проходит через точку A.
Опыты показывают,
что для качения звена 1 к нему необходимо
приложить движущий момент МД
(рис.4.3,в). Это обусловлено тем, что при
перекатывании звена 1 удельные давления
перемещаются в направлении перекатывания
на некоторое расстояние k
вследствие чего возникает момент
сопротивления перекатывания
![]() .
При равномерном качении сумма моментов
всех сил, действующих на звено 1, будет
равна нулю:
.
При равномерном качении сумма моментов
всех сил, действующих на звено 1, будет
равна нулю:
![]()
![]()
Если звено 1 перекатывается под действием силы P, то в зоне касания катка с опорной плоскостью возникает сила трения скольжения Fn, направленная противоположно силе P,предельное значение которое (сила трения покоя) согласно формуле (4.6)
![]()
В этом случае для равномерного качения необходимо соблюсти условия Мд=Ph=Qk и
![]() ,
т. е.
,
т. е.
![]() ,
откуда
,
откуда![]() .
При чистом скольжении необходимо
.
При чистом скольжении необходимо![]() и
и![]() ,
откуда
,
откуда![]() .
Одновременное качение и скольжение
возможно при
.
Одновременное качение и скольжение
возможно при![]()
Коэффициент трения качения.
Как видно из формулы (4.10), сопротивление качения характеризуется коэффициент трения качения k, который имеет разновидность длины. Значение k определяют опытным путём: для пары сталь-сталь k=0.003…0.0005 см, для пары закалённая сталь - закалённая сталь k=0.001 см.
Потери на трение качения значительно меньше, чем на трение скольжения. Поэтому во многих механизмах, а особенно в приборах, где силы трения являются главными сопротивлениями, конструкции выполняются так, чтобы трение скольжения заменить трение качения.
Глава 5. Синтез зубчатых механизмов
5.1. Основная теорема и основной закон зацепления
Рис. 5.1. К определению форм профиля двух взаимоогибаемых кривых: а - схема механизма с высшей парой; б – план скоростей.
Пусть передача
вращения между двумя осями
![]() и
и![]() (рис.
5.1,а) с угловыми скоростями
(рис.
5.1,а) с угловыми скоростями![]() и
и![]() осуществляется
посредством двух взаимоогибаемых кривых
осуществляется
посредством двух взаимоогибаемых кривых![]() и
и![]() ,
принадлежащих звеньям 1 и 2. Проведём в
точке соприкосновенияC
кривых
,
принадлежащих звеньям 1 и 2. Проведём в
точке соприкосновенияC
кривых
![]() и
и![]() нормальn
– n
и касательную t
– t
к этим кривым.
нормальn
– n
и касательную t
– t
к этим кривым.
Скорости
![]() и
и![]() точек
точек![]() и
и![]() принадлежащим звеньям 1 и 2, связаны
условием
принадлежащим звеньям 1 и 2, связаны
условием
![]()
План скоростей механизма, построенный по этому уравнению, показан на рис. 5.1,б
Из точек
![]() и
и![]() (рис.5.1,а) опускаем на нормальn-n
перпендикуляры
(рис.5.1,а) опускаем на нормальn-n
перпендикуляры
![]() и
и![]() ,
а из полюса плана скоростей (рис. 5.1,б)-
перпендикуляр
,
а из полюса плана скоростей (рис. 5.1,б)-
перпендикуляр![]() на направлении
на направлении![]() .
.
Отрезок (![]() )
представляет собой нормальную составляющую
)
представляет собой нормальную составляющую![]() векторов скоростей
векторов скоростей![]() и
и![]() .
.
Из подобия иииимеем
![]() и
и
![]() (5.1)
(5.1)
Отрезки (![]() ),(
),(![]() ),
(
),
(![]() )
представляют собой соответственно
скорости
)
представляют собой соответственно
скорости![]() ,
,![]() и
и![]() .
Тогда соотношения (9.1) могут быть
представлены так:
.
Тогда соотношения (9.1) могут быть
представлены так:
![]() и
и
![]() ,
,
или
![]() и
и
![]() .
.
Заменяя
![]() и
и![]() их значениями, равными
их значениями, равными![]() и
и![]() ,
откуда
,
откуда
![]()
![]()
![]() (5.2)
(5.2)
Следовательно,
передаточная функция
![]() равна
равна
![]() (5.3)
(5.3)
Продолжим нормаль
n-n
до пересечения в точке
![]() c
отрезком
c
отрезком
![]() .
Тогда из подобия
.
Тогда из подобия![]() и
и![]() имеем
имеем
![]() ,
,
и формула (5.3) принимает окончательный вид:
![]() (5.4)
(5.4)