

Из полученного выражения видно, что результат преобразования не зависит ни от частоты входного сигнала, ни от частоты квантующих импульсов. Однако следует отметить, что выражение для N x получено, во-первых, без
Рисунок 2.15
учета погрешности от квантования, во-вторых, при выводе выражения для N x
считалось, что f0 и частота входного сигнала f не изменяются в течении времени Tц и, в-третьих, не учтена погрешность формирования интервала tx ,
вызванная, например, изменением амплитуд входных сигналов U1 и U2 .
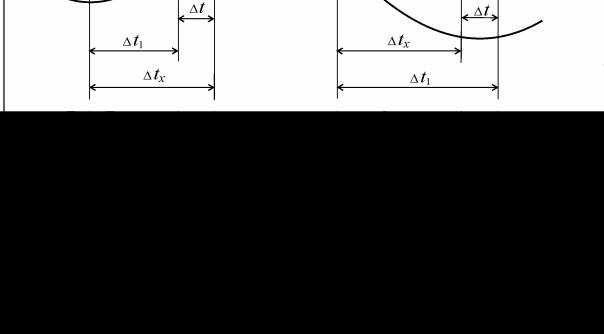
Инструментальные погрешности. Если в одном из двух напряжений
(рис. 2.15) присутствует постоянная составляющая, |
например в U2 , то ее |
наличие приводит к уменьшению интервала времени |
tx между моментами |
перехода через нуль положительных полуволн на t и увеличивает на t |
|
интервал времени между моментами перехода через нуль отрицательных полуволн. Отсюда ясно, что погрешность от наличия постоянной составляющей можно исключить, если фазовый сдвиг определять как среднее арифметическое измерений t1 и t2 за один период входного напряжения.
55
t1 + t2 |
= |
tx − t + |
tx + t |
= tx . |
2 |
|
2 |
|
|
Другой причиной несоответствия интервала времени |
tx фазовому сдвигу ϕx |
|||
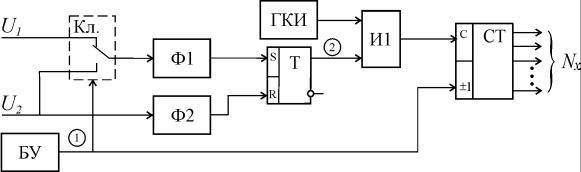
может быть неидентичность формирователей Ф1 и Ф2. Для исключения такой погрешности применяют метод периодического сравнения. Структурная схема АЦП с коррекцией инструментальной погрешности приведена на рис. 2.16, а
Рисунок 2.16
временные диаграммы работы АЦП, поясняющие принцип коррекции, изображены на рис. 2.17. Блок управления (БУ) подключает к формирователю Ф1, то напряжение U1, то напряжение U2 . Поэтому на выходе триггера за
время, |
равное периоду коммутации TБУ |
формируются два интервала времени |
|
t1 и |
t2 . Первый из них состоит |
из искомого |
tx = f (ϕx ) и t , |
обусловленного неидентичностью формирователей Ф1 и Ф2. Второй интервал времени t2 равен t , поскольку он формируется тогда, когда на оба формирователя подано одно и то же напряжение U2 . Импульсы с блока управления синхронно с изменением положения ключа Кл изменяют режим работы реверсивного счетчика СТ. В процессе квантования t1 счетчик работает
56
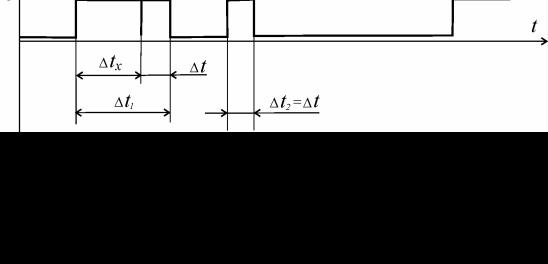
Рисунок 2.17
на сложение, а t2 - на вычитание. При наличии неидентичности формирователей из результата, полученного на счетчике в первую половину периода TБУ , во второй половине TБУ из счетчика будет исключено количество импульсов, пропорциональное t .
2.4. Аналого-цифровое преобразование частоты периодического сигнала
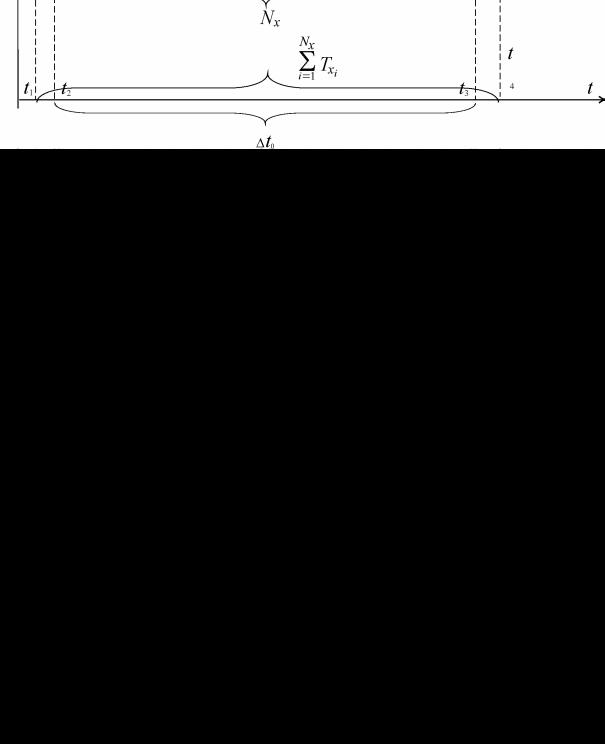
Принцип действия наиболее распространенных АЦП частоты основан на сопоставлении суммарного времени прохождения N x импульсов, которые формируются по одному на каждый период неизвестной частоты f x , с
известным промежутком времени t0 . В этом случае без учета погрешности имеем
Nx
∑Txi = t0
i=1
или при Txi =Tx
N x Tx = t0 .
Откуда |
|
N x = |
t0 = t0 f x |
|
Tx |
|
57 |
а)
б) Рисунок 3.18
и N x пропорционально среднему за время t0 значению искомой частоты f x .
Рассмотрим структурную схему АЦП, изображенную на рис. 2.18а. Входной периодический сигнал с измеряемой частотой f x поступает на вход
58
формирователя импульсов Ф. С выхода формирователя Ф импульсы прямоугольной формы и той же частоты f x подаются на один из входов схемы совпадения И. На другой вход схемы совпадения поступает разрешающий
импульс длительностью t0 . Он формируется |
делителем частоты ДЧ из |
импульсов прямоугольной формы частотой f0 , |
вырабатываемых генератором |
Г. Счетчик СТ подсчитывает количество импульсов частотой f x , прошедших через схему совпадения И за время t0 . В рассмотренной схеме осуществляется квантование известной длительности интервала t0 периодом Tx искомой
частоты f x . Поэтому абсолютная погрешность дискретности (t2 −t1) +(t4 −t3 )
не превышает ±Tx |
|
(рис. 2.18б). |
Следовательно, |
с учетом |
погрешности |
||||||||||||||||||
дискретности можно записать |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
t0 =Tx (N x ±1) . |
|
|
|
|
|
|
|
||||||||||
Откуда с учетом |
t0 частота f x |
равна |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
fx = |
f0 |
|
(N x ±1) . |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая нестабильность частоты |
f0 и погрешность δ f0 |
можно записать |
|||||||||||||||||||||
|
f |
0 |
|
|
|
|
|
|
|
|
|
|
f |
0 |
N |
|
|
|
|
1 |
|||
fx = |
|
(1±δ f0 )(Nx |
±1) |
|
или |
f x = |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
k |
|
|
|
k |
(1 ±δ f0 ) 1 ± |
|
|
. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N x |
||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
δ fx |
|
|
|
|
|
|
|
|
|
|
δ f0 |
+ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
≈ ± δ f0 + |
|
|
|
или δ fx ≈ ± |
|
|
. |
|
|
|
|||||||||||
|
|
|
|
|
|
N x |
|
|
|
|
|
|
|
|
|
|
t0 f x |
|
|
|
|||
Из полученного выражения для погрешности видно, что она растет при |
|||||||||||||||||||||||
уменьшении частоты входного сигнала |
f x |
и для ее уменьшения необходимо |
|||||||||||||||||||||
увеличить длительность интервала |
t0 . |
|
Однако увеличение |
|
t0 |
|
приводит к |
||||||||||||||||
уменьшению быстродействия АЦП. Другим способом повышения точности преобразования низких частот является умножение искомой частоты на постоянный коэффициент k . Тогда длительность квантующих импульсов
59
Рисунок 2.19
уменьшится k раз и, следовательно, в k раз уменьшится погрешность дискретности.
Умножители частоты. Рассмотрим две реализации умножителей частоты. Первая из них (рис. 2.19) основана на формировании из входного сигнала симметричного треугольного напряжения с последующим
60
двухполупериодным выпрямлением. Затем из полученного напряжения треугольной формы с частотой равной 2 fx необходимо исключить постоянную составляющую U и сформировать импульсы прямоугольной формы. Для
последующих удвоений следует между формирователями Ф2 и Ф3 установить соответствующие количество выпрямителей.
Другая реализация схемы умножения частоты входного сигнала (рис. 2.20) основана на формировании импульсов в каждый из моментов перехода
через нуль входного сигнала. |
Длительность этих импульсов должна |
быть |
меньше Tx / 2 . Указанные |
импульсы формируются одновибраторами |
|
ОД1 и ОД2, и суммируются в ИЛИ. В результате этого, такая схема позволяет умножить на два частоту входного сигнала.
Рассмотренные способы уменьшения погрешности дискретности направлены на увеличение числа квантующих импульсов либо за счет увеличения интервала квантования t0 , либо за счет уменьшения длительности квантующего импульса Tx .
Доизмерение дробной части периода. Известен метод повышения
точности заключающийся в доизмерении |
разности между |
t0 и N x Tx |
( (t2 −t1), (t4 −t3 ) ) (рис. 2.18б), т.е. дробной |
части периода Tx |
квантующих |
импульсов. Для упрощения рассмотрения метода растягивания дробной части
периода |
Tx квантующих |
импульсов будем считать, что сигнал, задающий |
|||||
опорный |
импульс |
t0 , |
синхронизирован |
с входным сигналом |
f x . Тогда |
||
t2 −t1 = 0 |
и абсолютная |
погрешность определяется |
значением |
интервала |
|||
(t4 −t3) . |
|
|
|
|
|
|
|
При низкой частоте |
f x на интервале |
t0 укладывается на краю интервала |
|||||
малое количество периодов Tx и образуется |
большая погрешность |
||||||
дискретности |
Tx |
= t4 −t3 , обусловленная |
дробной частью периода a Tx на |
||||
|
|
i |
|
|
|
|
|
краю интервала |
t0 (рис. 2.21). |
|
|
|
|||
|
|
|
|
61 |
|
|
|