

Содержание
1 Определение погрешности измерений 2
2 Определение чувствительности датчика 3
2.1 Основные понятия и определения 3
3 Расчет автоматической системы регулирования 6
3.1 Основные понятия и определения 6
3.3 Показатели качества регулирования 9
3.4 Законы автоматического регулирования 11
3.5 Выбор закона регулирования 13
3.6 Расчет оптимальных значений параметров настройки регулятора 15
Список использованных источников 18
1 Определение погрешности измерений
Определим наибольшую допустимую абсолютную погрешность ΔA и относительные погрешности измерений γотн при различных значениях измеряемой величины А.
На примере «Измеритель-регулятор микропроцессорный ТРМ12»:
Класс точности: 0,5
Диапазон измерений: 0-750оС
Значения измеряемой величины: 50 и 600 оС
Абсолютная погрешность вычисляется по формуле 1.1
|
|
(1.1) |
Тогда получим ΔA![]()
Относительную погрешность вычислим по формуле 1.2
|
|
(1.2) |
Соответственно:
![]()
![]()
Можно заметить, что чем больше значение измеряемой величины, тем меньше относительная погрешность.
2 Определение чувствительности датчика
2.1 Основные понятия и определения
Датчиком, или первичным измерительным преобразователем, называется средство измерения, воспринимающее воздействие измеряемой величины (температуры, давления и т. д.) и вырабатывающее сигнал измерительной информации в форме, удобной для дистанционной передачи, преобразования, обработки или хранения, но не поддающийся непосредственному восприятию наблюдателем.
Зависимость сигнала на выходе датчика от измеряемой величины отражается его статической характеристикой, которая может также называться градуировочной или характеристикой преобразования.
Статическая характеристика может быть выражена в виде таблицы, графика или формулы. Характеристика, выраженная в аналитическом виде (формулой), называется законом преобразования
|
Y=f (X), |
(2.1) |
где X- измеряемая величина, ед. измер. вел.;
Y- сигнал на выходе датчика, ед. вых. сигн.
По статической характеристике можно определить важнейший параметр датчика – его чувствительность или коэффициент преобразования. Чувствительностью называется отношение изменения сигнала на выходе ΔY к вызвавшему его изменению измеряемой величины ΔX.
При линейной статической характеристике чувствительность датчика σ в (ед. вых. сиг.)/(ед. измер. вел.) во всем рабочем диапазоне одинакова и вычисляется по формуле
|
σ = ΔY/ ΔX. |
(2.2) |
При нелинейной статической характеристике
чувствительность датчика зависит от
значения измеряемой величины. Кроме
того, результат ее вычисления по формуле
2.2 будет зависеть от принятой величины
приращения ΔX.
Поэтому при нелинейной характеристике
чувствительность следует вычислять
как предел отношенияΔY/ ΔXпри![]() 0,
т. е. как производную f′(X):
0,
т. е. как производную f′(X):
|
σ = |
(2.3) |
Таким образом, для определения чувствительности датчика при конкретных значениях измеряемой величины нужно продифференцировать функцию закона преобразования f(X) и в полученное выражение производной подставить заданные численные значения.
По заданному закону преобразования, определим чувствительность датчика при различных значениях контролируемой величины. Вычисление произведем методом дифференцирования.
Закон преобразования записан формулой 2.4:
|
|
(2.4) |
Так как характеристика нелинейная, то продифференцируем R:
Тогда
R’ (293) = = -23,99кОмК
= -23,99кОмК
На рисунке 2.1 приведена схема датчика
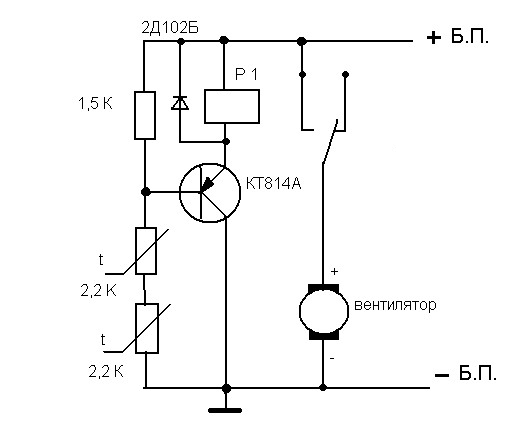
Рисунок 2.1 – схема кобальто-марганцевого терморезистора
Терморезистор — полупроводниковый резистор, в котором используется зависимостьэлектрического сопротивленияполупроводникового материала от температуры. Терморезистор изготавливают в виде стержней, трубок, дисков, шайб, бусинок и тонких пластинок преимущественно методами порошковой металлургии. Их размеры могут варьироваться в пределах от 1–10 мкм до 1–2 см.