

ТЕМА 1. Основні поняття ТММ
.pdfТЕМА 1. ОСНОВНІ ПОНЯТТЯ ТЕОРІЇ МЕХАНІЗМІВ І МАШИН (ТММ)
Граф курсу ТММ показано на рис.1.1.
Рис. 1.1. Граф курсу ТММ
Рис. 1.2. Класифікація машин за І.І.Артоболевським
7
1.1. Машина – пристрій, який виконує механічний рух для
перетворення енергії, матеріалів та інформації з метою заміни або полегшення фізичної чи розумової праці людини.
Класифікація машин за І.І. Артоболевським наведена на рис.1.2.
Енергетичні машини – це машини, які перетворюють будьякий вид енергії на механічну або навпаки.
Двигуни перетворюють будь-який вид енергії на механічну,
перетворювачі |
– навпаки. Наприклад: |
електродвигуни |
та електрогенератори. |
|
|
Робочі машини – це машини, які призначені для |
||
перетворення |
матеріалів. Робочі машини |
підрозділяються |
на технологічні, які змінюють форму, склад або структуру об'єктів, що обробляються (наприклад, верстати, преси, дробарки, насоси тощо) і транспортувальні, які призначені тільки для переміщення об'єктів (наприклад, конвеєри, підйомники, ліфти, автомобілі тощо).
Інформаційні машини – це машини, які призначені для перетворення інформації. Контрольно-керуючі машини перетворюють контрольно-вимірювальну інформацію з метою керування енергетичною або робочою машиною. Математичні машини перетворюють інформацію, яка отримується у вигляді різноманітних математичних образів, алгоритмів тощо (сюди відносяться електронно-обчислювальні машини).
Кібернетичні машини здатні замінювати деякі функції людини (розпізнавати літери, образи, відображати людську мову, виконувати відповідні рухи за усною командою людини, замінювати окремі органи людини – серце, нирки, кінцівки тощо).
1.2. Механізм – це система тіл, що призначена для перетворювання руху одного або кількох тіл у потрібні рухи інших тіл. Наприклад: шарнірно-важільний механізм у двигуні внутрішнього згоряння перетворює поступальний рух поршня
вобертальний рух колінчастого валу.
1.3.Прилад – це пристрій для реєстрації, вимірювання, контролю та регулювання фізичних, хімічних та інших процесів. Наприклад: електровимірювальні, метрологічні, ваговимірювальні, геодезичні та інші прилади.
1.4.Апарат – це пристрій, в якому протікають фізичні, хімічні та інші процеси, пов'язані зі зміною стану, властивостей, якості інших тіл без чітко вираженого циклічного руху самого пристрою або його частин. Наприклад: апарати хімічної промисловості, для здобування каучуку, перегонки нафти тощо.
1.5.Знаряддя праці – пристрій, що концентрує зусилля людини. Наприклад: лопата, лом, молоток тощо.
8
1.6. Механічний пристрій – це обладнання, що служить для фіксації положення тіла або зміни його форми без чітко вираженого циклічного руху частин цього обладнання. Наприклад: цанговий затискач, слюсарні лещата тощо.
1.7.Ланка
1.7.1.Деталь машини – це виріб, який виготовлено
зодного матеріалу без складальних операцій. Наприклад: вал, зубчасте колесо, кришка тощо.
1.7.2.Ланка механізму – це деталь або сукупність деталей, які жорстко з'єднані між собою та входять у механізм як єдине ціле.
1.7.3.Види ланок
1.7.3.1.Вхідна ланка – це ланка, якій надається рух, що підлягає перетворенню.
1.7.3.2.Вихідна ланка – це ланка, яка здійснює рух, для виконання якого призначений механізм.
1.7.3.3.Стояк – нерухома ланка механізму. УВАГА! У механізмі завжди один стояк.
1.7.3.4. Кривошип – це ланка, яка здійснює повний оберт навколо осі обертання.
1.7.3.5.Коромисло – це ланка, яка здійснює неповний оберт або коливальний рух.
1.7.3.6.Повзун – це ланка, яка здійснює
поступальний рух.
1.7.3.7.Шатун – це ланка, яка здійснює складний
(плоскопаралельний рух).
1.7.3.8.Ведуча ланка – ланка, для якої елементарна робота зовнішніх сил, що прикладені до неї, додатна.
1.7.3.9.Ведена ланка – ланка, для якої елементарна робота зовнішніх сил, що прикладена до неї, від'ємна.
1.7.3.10.Початкова ланка – це ланка, якій приписано узагальнену координату, що однозначно визначає положення механізму.
Примітка: Найчастіше за початкову ланку приймається кривошип, тому що йому найпростіше приписати узагальнену координату (кут повороту ).
1.8.Кінематична пара (КП) – це рухоме з'єднання двох ланок, які стикаються, що обмежує їх відносний рух.
1.8.1.Елемент КП – сукупність поверхонь, ліній, точок, які належать ланкам, і які стикаються при їх відносному русі.
1.8.2. |
Класифікація КП за |
числом |
умов |
зв'язку |
(за класами). |
|
|
|
|
За числом |
умов зв'язку КП |
діляться |
на 5 |
класів |
9

(за класифікацією І.І.Артоболевського).
Номер класу відповідає числу умов зв'язку - тобто обмежень, що накладаються на відносний рух ланок.
Як відомо з курсу теоретичної механіки, вільне абсолютно тверде тіло, що рухається у просторі, має шість степенів вільності (H ). З'єднання ланок у кінематичну пару накладає на їх відносний рух певні умови зв'язку. Число таких умов зв'язку:
S 6 H , |
(1.1) |
де H – число степенів вільності ланки, що входить у кінематичну пару.
Іноді застосовується класифікація за В.В.Добровольським – за числом степенів вільності H .
Деякі кінематичні пари наведені на рис. 1.3 … 1.11.
1.КУЛЯ – ПЛОЩИНА |
H 5 |
|
S 6 H 6 5 1 |
|
1клас |
|
(п, ятирухома) |
|
Умовне позначення: |
Рис. 1 3 |
|
2. ЦИЛІНДР – ПЛОЩИНА |
H 4 |
|
S 6 H 6 4 2 |
|
2 клас |
|
(чотирирухома) |
|
Умовне позначення: |
Рис. 1.4
10
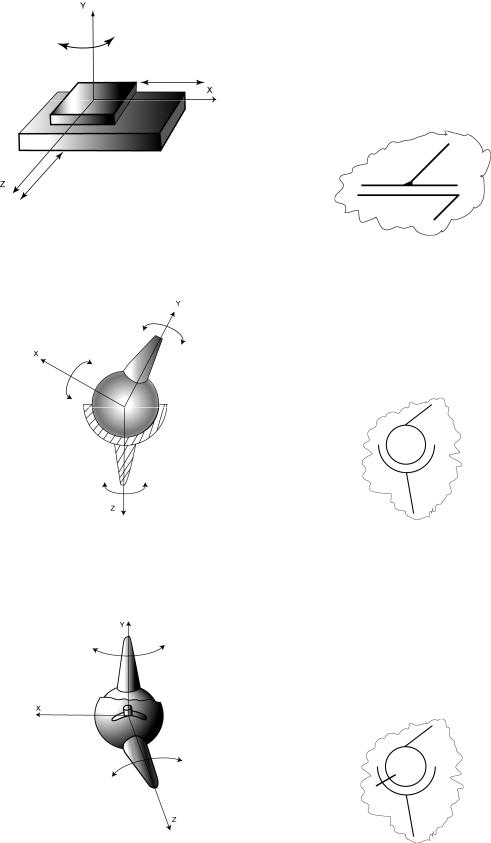
3. ПЛОЩИННА
Рис. 1.5
4. СФЕРИЧНА
Рис. 1.6
5 СФЕРИЧНА З ПАЛЬЦЕМ
Рис. 1.7
H 3
S 6 H 6 3 3 3 клас
(трирухома)
Умовне позначення:
H 3
S 6 H 6 3 3 3 клас
(трирухома)
Умовне позначення:
H 2
S 6 H 6 2 4 4 клас
(дворухома)
Умовне позначення:
11
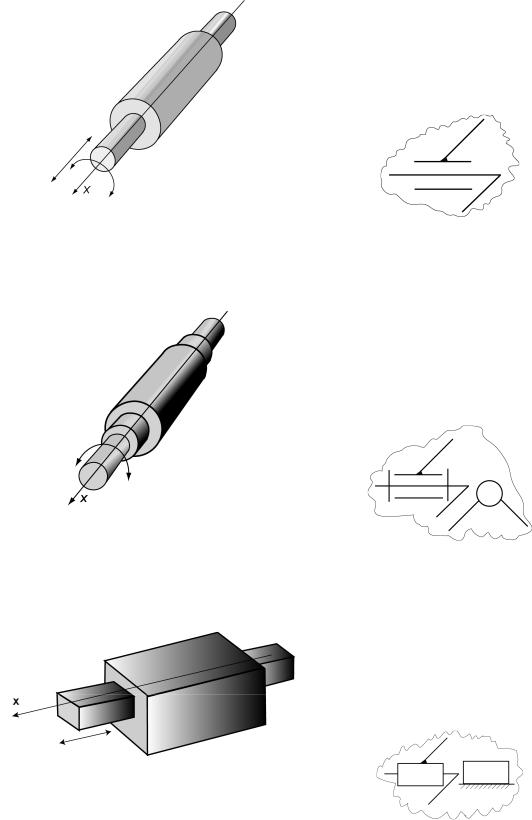
6. ЦИЛІНДРИЧНА
Рис. 1.8
7. ОБЕРТАЛЬНА
Рис. 1.9
8. ПОСТУПАЛЬНА
Рис. 1.10
H 2
S 6 H 6 2 4 4 клас
(дворухома)
Умовне позначення:
H 1
S 6 H 6 1 5 5 клас
(однорухома)
Умовне позначення:
H 1
S 6 H 6 1 5 5 клас
(однорухома)
Умовне позначення:
12
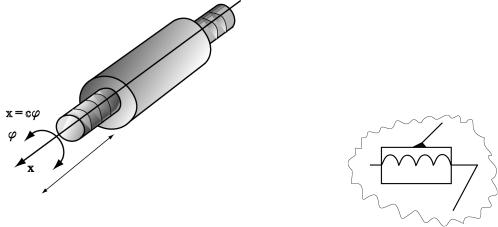
9. ГВИНТОВА |
H 1 |
|
S 6 H 6 1 5 |
|
5 клас |
|
(однорухома) |
|
Умовне позначення: |
x залежить від
Рис. 1.11
1.8.3.Алгоритм визначення класу кінематичної пари
1.Систему координат слід ув'язати з однією з ланок кінематичної пари.
2.Визначити можливі елементарні переміщення відносно даної системи координат (Н).
3.Перевірити наявність можливих функціональних зв'язків між цими елементарними переміщеннями (приклад “гвинтової пари”).
4. За формулою S 6 H визначити число умов зв'язку, що і визначає клас кінематичної пари.
1.8.4. Вищі та нижчі кінематичні пари
Кінематичні пари, у яких ланки стикаються між собою поверхнями або площинами, називаються нижчими.
Кінематичні пари, у яких ланки стикаються між собою по лінії або в точці, називаються вищими.
Нижчі кінематичні пари мають властивість оборотності руху. Вищі кінематичні пари такої властивості не мають.
Властивість оборотності руху полягає в тому,
що траєкторія відносного руху точки не залежить від того, з якою
ланкою ця точка зв'язана. |
|
|
Кінематичні пари, наведені на рис. 1.3, 1.4 |
– |
вищі, |
на рис. 1.5...1.11 – нижчі. |
|
|
На рис. 1.12 наведений приклад нижчої кінематичної пари, |
||
що має властивість оборотності руху (траєкторії точок |
К1 |
і К2 |
однакові). |
|
|
13
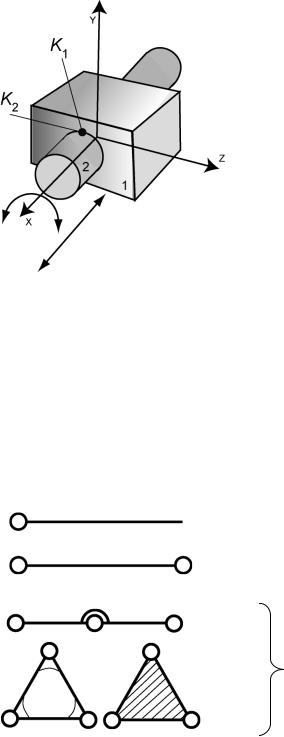
H 2
S 6 H 6 2 4
4 клас
(дворухома)
нижча (є властивість
оборотності руху)
Рис. 1.12. До властивості оборотності руху
1.8.5. Умовні позначення ланок
Умовні позначення ланок і кінематичних пар регламентує ГОСТ 2.770-68. Умовні позначення кінематичних пар – див. п. 1.8.2.
- одноелементна ланка
- двоелемента ланка
- триелементна ланка
Рис. 1.13. Умовні позначення ланок
1.9. Кінематичні ланцюги (КЛ) – це сукупність ланок,
що з'єднані кінематичними парами.
14
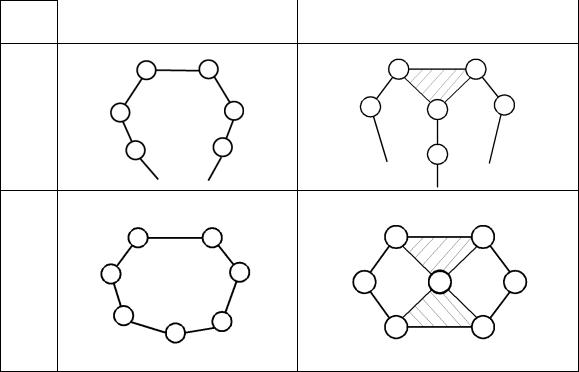
Простий Складний
Відкритий
Замкнутий
Рис. 1.14. Види кінематичних ланцюгів
1.9.1.Простий КЛ – це ланцюг, у якого кожна ланка входить не більш ніж до двох кінематичних пар.
1.9.2.Складний КЛ – це ланцюг, у якого є хоча б одна ланка, що входить більш ніж до двох кінематичних пар.
1.9.3.Відкритий КЛ – це ланцюг, ланки якого не утворюють замкнутих контурів.
1.9.4.Замкнутий КЛ – це ланцюг, ланки якого утворюють один чи декілька замкнутих контурів.
1.9.5.Плоский КЛ - це ланцюг, ланки якого переміщуються
упаралельних площинах.
1.9.6.Просторовий КЛ - це ланцюг, ланки якого
переміщуються по площинах, що перетинаються, або по просторових поверхнях.
1.10.Кінематична схема механізму (КСМ) - це форма опису механізму, що містить інформацію для його кінематичного дослідження. Такою інформацією є характер кінематичних пар та їх точне розташування. КСМ виконується у масштабі.
1.11.Масштабний коефіцієнт ТММ – це масштабний коефіцієнт, який показує, скільки натуральних фізичних одиниць міститься в одному міліметрі відрізку, що зображує цю величину.
Має розмірність.
15
Приклади:
l - масштаб довжини, м/мм;
v - масштаб швидкості, мс-1/мм;
a - масштаб прискорення, мс-2/мм;
F - масштаб сили, Н/мм;
M - масштаб моменту, Нм/мм;
А - масштаб роботи тощо.
Зв'язок між масштабом довжини у ТММ і масштабом креслення:
l |
0,001 m, |
(1.2) |
де m – степінь зменшення. Наприклад: 1:2 l = 0,002 м/мм.
1.12. Структурна схема механізму - це форма опису механізму, що містить інформацію про його структуру, тобто про кількість ланок і характер їх з'єднання.
Послідовність побудови структурної схеми
1.Вищі кінематичні пари замінюються нижчими (якщо такі є).
2.Поступальні кінематичні пари замінюються обертальними
(умовно – ставиться позначка “ ”).
3.Зображується стояк – відрізком прямої або багатокутником (див. примітку).
4.Зображуються ланки, які утворюють кінематичні пари зі стояком.
5.Зображується решта ланок у послідовності утворювання замкнутих контурів.
Примітка: Всі кінематичні пари зображуються кружечками, а ланки - відрізками прямої, трикутниками (багатокутниками) за числом елементів ланки. Для зручності спочатку складається таблиця кінематичних пар і ланок, що їх утворюють
(див. рис. 1.15, б).
На рис. 1.15 розглянуто приклад побудови структурної схеми для шарнірно-важільного механізму (ШВМ), наприклад, двигуна внутрішнього згоряння (е - дезаксіал).
16