

ТЕМА 10. Синтез кулачк. мех
..pdfТЕМА 10. СИНТЕЗ КУЛАЧКОВИХ МЕХАНІЗМІВ
10.1. Основні поняття та задача
Механізм, у якому є ланка зі змінним радіусом-вектором кінематичного елемента, називається кулачковим механізмом (КМ).
Кулачковий механізм складається з кулачка (ведуча ланка), штовхача (ведена ланка) і стояка, тобто є триланковим механізмом.
У машинах-автоматах із жорсткими зв'язками кулачкові механізми здійснюють “жорстке” програмування виробничого
процесу. У машинах-автоматах із електричними, |
гідравлічними |
|||
та пневматичними |
зв'язками |
кулачкові механізми |
найчастіше |
|
виконують функції керування. |
|
|
|
|
У найпростіших випадках вони вмикають та вимикають робочі |
||||
органи машини-автомата. |
|
|
|
|
Кулачкові механізми дають можливість отримати практично |
||||
будь-який закон |
руху вихідної |
ланки (штовхача), |
в |
тому числі, |
з тимчасовими зупинками останньої при безперервному русі вхідної ланки (кулачка).
Задача синтезу кулачкових механізмів полягає у проектуванні профілю кулачка, що задовольняє певні умови:
закон руху вихідної ланки (штовхача);
обмеження кута тиску;
умову опуклості профілю кулачка для кулачкових механізмів із плоским штовхачем.
10.2. Види кулачкових механізмів
Як і всі механізми, кулачкові механізми (КМ) можуть бути
плоскими та просторовими, центральними та позацентровими.
Вони поділяються також за видом руху кулачка та штовхача. Кулачковий механізм є плоским, якщо його ланки рухаються
у паралельних площинах.
Кулачковий механізм є просторовим, якщо його ланки рухаються у площинах, що перетинаються.
Кулачковий механізм є центральним, якщо вісь руху штовхача проходить через центр обертання кулачка (рис. 10.2, 10.8), та позацентровим , якщо вона не проходить через центр обертання кулачка (рис. 10.3...10.5).
Рух кулачка 1 кулачкового механізму може бути поступальним
(рис. 10.1), обертальним (рис. 10.2...10.7) і хитним (рис. 10.8).
Рух штовхача 2 може бути поступальним (рис. 10.1...10.5, 10.8) і хитним (рис. 10.6, 10.7).
197
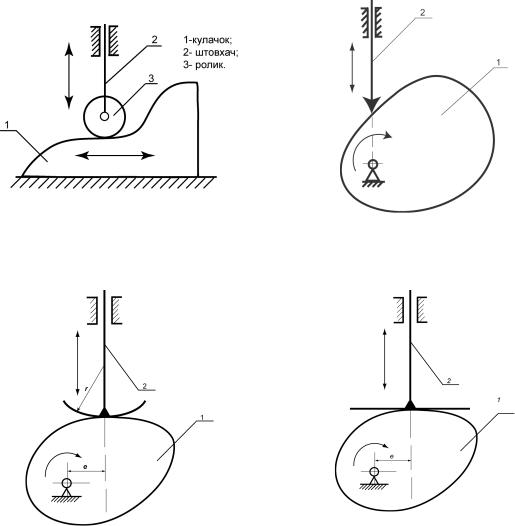
У кулачкових механізмах, наведених на рис. 10.2 і 10.3, кулачок діє безпосередньо на штовхач, причому під час руху ланок елементи кінематичних пар ковзають один по одному. Найбільшому зносу підлягають елементи вищої кінематичної пари в механізмі, наведеному на рис. 10.2, тому що тут одна точка штовхача ковзає по поверхні кулачка, і питомий тиск дуже великий.
При застосуванні “грибовидного” штовхача (рис. 10.3) знос поверхні кулачка трохи зменшується. Якщо радіус кривизни поверхні “грибовидного” штовхача збільшити до нескінченності, то елемент кінематичної пари перетворюється на площину, а кулачковий механізм – у кулачковий механізм з плоским поступально рухомим штовхачем (рис. 10.4).
Рис. 10.1. Кулачковий механізм |
Рис. 10.2. Центральний КМ із |
(КМ) з поступально рухомими |
гострим штовхачем |
кулачком і штовхачем |
|
Рис. 10.3. Позацентровий КМ із |
Рис. 10.4. Позацентровий КМ |
“грибовидним” штовхачем |
із плоским “тарілчастим” |
|
штовхачем |
198
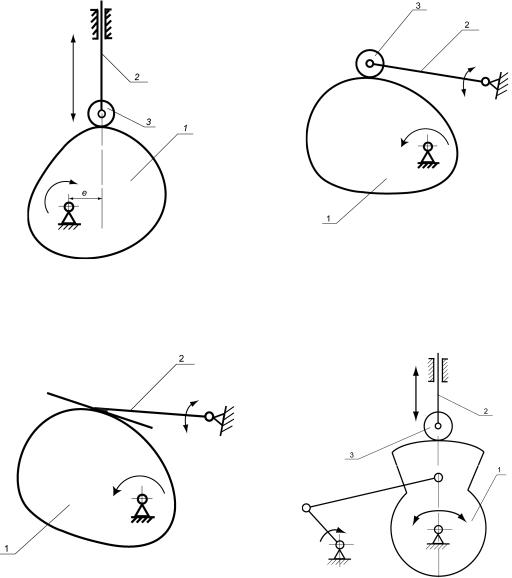
Рис. 10.5. Позацентровий КМ |
Рис. 10.6. КМ із коромисловим |
із роликовим штовхачем |
роликовим штовхачем |
Рис. 10.7. КМ із коромисловим |
Рис. 10.8. КМ із хитним |
плоским штовхачем |
кулачком |
Для запобігання швидкого зносу поверхні кулачка дуже часто в якості додаткової ланки уводиться ролик 3 (рис. 10.1, 10.5, 10.6
і10.8), завдяки чому тертя ковзання замінюється тертям кочення,
ізнос зменшується.
Вякості елементів кінематичних пар на штовхачу можуть бути
точка, лінія, поверхня, зокрема, площина (рис.10.4 і 10.7).
10.3. Поняття про замикання вищої кінематичної пари
Для нормального функціонування кулачкових механізмів необхідно мати сталий контакт між кулачком і штовхачем. Такий
199
контакт забезпечується так званим замиканням вищої кінематичної пари, яке може бути силовим і геометричним.
Силове замикання здійснюється або під дією власної сили тяжіння штовхача, або за допомогою пружини (рис. 10.1...10.5, 10.8).
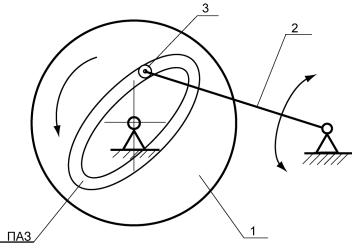
Геометричне замикання здійснюється за допомогою паза, нарізаного на шайбі, яким спрямовується рух ролика штовхача
(рис. 10.9).
Рис. 10.9. Геометричне замикання вищої кінематичної пари
10.4. Поняття про фазові кути кулачка
Кут повороту кулачка, що відповідає підніманню штовхача,
називається кутом віддалення в .
Кут повороту кулачка, що відповідає верхньому нерухомому положенню штовхача, називається кутом дальнього стояння д.
Кут повороту кулачка, що відповідає опусканню штовхача, називається кутом повертання п.
Кут повороту кулачка, що відповідає нижньому нерухомому положенню штовхача, називається базовим кутом або кутом близького стояння б .
в 0; д |
0; п 0; б 0. |
(10.1) |
||
Сума кутів: |
|
|
|
|
в |
д |
п |
б 3600 . |
(10.2) |
в |
д |
п |
роб - робочий кут. |
|
200
10.5.Основні закони руху вихідної ланки
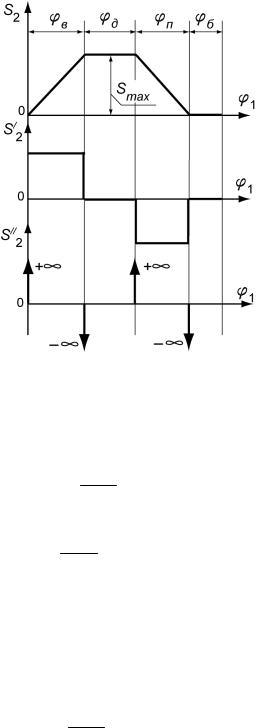
10.5.1.Стала швидкість (рис. 10.10)
Рис. 10.10. Закон “стала швидкість”
Для 1-ї ділянки (кут віддалення):
s2 smax 1.
в
s2/ smax const.
в
Для 3-ї ділянки (кут повертання):
s |
2 |
|
smax |
|
в |
|
д |
|
п |
. |
|
|
|||||||||||
|
|
|
п |
|
|
1 |
|||||
|
|
|
|
|
|
|
|
|
|
||
s2/ smax сonst.
п
(10.3)
(10.4)
(10.5)
(10.6)
Такий закон характеризується “жорсткими” ударами; сили, що діють на ланки механізму, різко зростають (теоретично прагнуть до нескінченності). Цей закон є суто теоретичним.
201

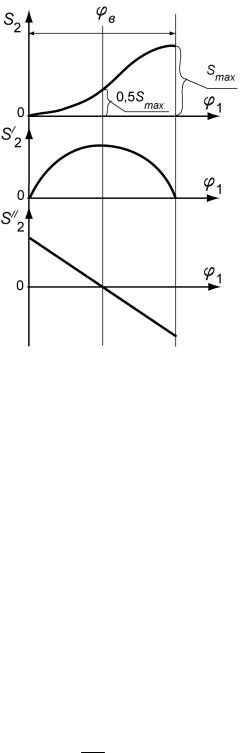
10.5.2. Стале прискорення (рис. 10.11)
|
|
|
|
|
|
|
|
Рис. 10.11. Закон “стале прискорення” |
|||||||||||||||||||||||||
Для 1-ї ділянки: 0 |
1 |
|
в |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
s |
2 |
|
2smax |
|
2 |
; |
s/ |
|
4smax |
|
; s |
// |
|
4smax |
. |
(10.7) |
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
1 |
|
|
2 |
|
|
|
|
|
2 |
1 |
|
2 |
|
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
в |
|
|
|
|||
Для 2-ї ділянки: |
в |
|
1 |
в . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
2 |
s |
max |
|
2smax |
|
в |
2 ; |
s/ |
4smax |
|
в |
; |
||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
2 |
|
|
2 |
|
|
|
|
1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
4smax |
|
|
|
в |
|
|
|
(10.8) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
s2// |
|
. |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
Такий |
закон |
характеризується |
м'якими |
ударами кулачка |
|||||||||||||||||||||||||||||
і штовхача.
202
10.5.3. Лінійний закон змінення прискорення (рис. 10.12)
Рис. 10.12. Лінійний закон змінення прискорення Якщо 0 1 в , то:
|
|
|
|
|
1 |
2 |
|
|
1 |
|
3 |
|
|
s2 |
smax |
|
|
|
|
|
|
|
|
. |
(10.9) |
||
|
|
|
|
||||||||||
|
3 |
|
|
|
2 |
|
в |
|
|
||||
|
|
|
в |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ |
|
|
|
в |
|
|
// |
|
|
|
в |
2 |
1 |
|
|
|||||
s |
6s |
|
|
1 |
|
1 |
|
; s |
6s |
|
|
|
|
|
. |
(10.10) |
|||||
2 |
max |
|
|
3 |
2 |
max |
|
|
|
3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
в |
|
|
|
|
За цього закону вихідна ланка (штовхач) рухається з м'якими ударами на початку та наприкінці свого ходу.
10.5.4. Трикутний закон змінення прискорення (рис. 10.13)
Для 1-ї ділянки: 0 1 в .
2
|
|
|
|
3 |
|
12s |
max |
2 |
|
// |
|
24s |
max |
|
|
|
|
1 |
|
/ |
|
|
|
|
|
|
|
||||
s |
2 4smax |
|
|
; s2 |
|
|
|
1 |
; |
s2 |
|
|
|
1. |
(10.11) |
в |
в3 |
в3 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
203
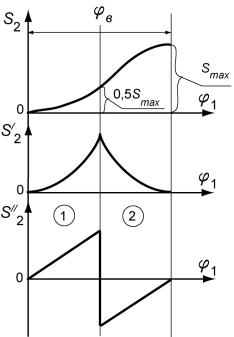
Для 2-ї ділянки: |
в |
|
1 |
|
в . |
|
|
|
|
|
||
|
|
|
|
|
|
|||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
1 |
|
3 |
|
|
s2 smax |
|
|
|
|
|
|
; |
(10.12) |
||||
|
|
|
|
|||||||||
1 4 |
|
|
в |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
/ |
12s |
max |
|
в |
2 |
// |
|
24s |
max |
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||
s2 |
|
|
|
|
|
; s2 |
|
|
|
|
|
. |
(10.13) |
|
|
|
3 |
|
|
3 |
|
|
|||||||
|
|
|
|
в |
|
|
|
в |
|
|
|
|
||
Рис. 10.13. Трикутний закон змінення прискорення
Цей закон характеризується м'якими ударами кулачка і штовхача.
10.5.5. Косинусоїдальний закон змінення прискорення (рис. 10.14)
Якщо 0 1 в , то:
|
|
s |
max |
|
|
|
|
1 |
|
|
/ |
|
s |
max |
|
|
|
|
1 |
|
|
|
s2 |
|
|
1 cos |
|
|
|
|
; s |
|
|
sin |
|
|
|
|
; |
(10.14) |
|||||
|
2 |
|
|
|
|
2 |
2 в |
|
|
|
|
|||||||||||
|
|
|
|
|
|
в |
|
|
|
|
|
|
в |
|
|
|||||||
204

// |
|
2s |
max |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
s2 |
|
|
|
cos |
|
|
|
. |
(10.15) |
|
2 |
в |
|||||||
|
|
2 в |
|
|
|
|
|
||
Рис. 10.14. Косинусоїдальний закон змінення прискорення
Цей закон характеризується м'якими ударами на початку та наприкінці руху штовхача.
10.5.6. Синусоїдальний закон змінення прискорення (рис. 10.15)
Якщо 0 1 в , то:
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||
s2 smax |
|
|
|
|
|
sin |
2 |
|
|
(10.16) |
||||||||||||||||
|
|
|
|
|
|
|
. |
|||||||||||||||||||
|
|
|
|
в |
|
2 |
|
|
|
|
|
|
|
в |
|
|
||||||||||
s/ |
|
|
s |
max |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
1 cos 2 |
|
|
|
|
. |
(10.17) |
|||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
2 |
|
|
в |
|
|
|
|
|
|
|
|
в |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
// |
|
|
|
2 S |
max |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
S2 |
|
|
|
|
|
|
|
sin |
|
2 |
|
|
|
|
|
|
. |
(10.18) |
||||||||
|
|
в2 |
|
в |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
205

Рис. 10.15. Синусоїдальний закон змінення прискорення
Цей закон є ідеальним, тому що за цього закону немає жодних ударів – ні жорстких, ні м'яких.
10.6. Кути тиску та передачі
Зобразимо позацентровий кулачковий механізм із роликовим штовхачем (рис. 10.16). При наявності ролика степінь рухомості механізму W 2.
При структурному, кінематичному та інших аналізах кулачкового механізму ролик вилучають. Побудуємо еквідистантну криву – теоретичний профіль кулачка (він називається також
центровим профілем).
Для нормальної роботи кулачкового механізму потрібно, щоб у точці контакту кулачка та штовхача В виникало нормальне
зусилля F12 , яке діє по нормалі n n. |
|
|
|
||
Розкладаємо силу |
|
на нормальну |
F/ |
і тангенціальну |
F// |
F |
|||||
12 |
|
12 |
12 |
||
|
|
|
|||
складові; vB2 - абсолютна швидкість штовхача. Позначимо кут між
векторами F12 і vB2 як кут тиску .
Кутом тиску називається гострий кут у точці контакту між вектором швидкості штовхача та нормаллю до профілю кулачка.
206