

Пропорційна гідравліка
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ “КПІ”
Затверждено
на засіданні кафедри прикладної гідроаеромеханіки і механотроніки Протокол №3 від 05.03.2009 р.
Рекомендовано Вченою Радою Механіко-машинобудівного інституту НТУУ „КПІ”
Протокол №7 від 18 березня 2009
МЕТОДИЧНІ ВКАЗІВКИ
ДО ЛАБОРАТОРНИХ РОБІТ З КУРСУ
“ДИСКРЕТНІ СИСТЕМИ КЕРУВАННЯ ГІДРОПНЕВМОАВТОМАТИКИ”
(частина 4 – Пропорційна гідравліка)
СТУДЕНТАМ, ЩО НАВЧАЮТЬСЯ ЗА ФАХОМ „ГІДРАВЛІЧНІ І ПНЕВМАТИЧНІ МАШИНИ”
Київ – 2009
1
Методические указания к лабораторным работам по дисциплине “Дискретные системы управления гидропневмоавтоматики” (часть 4 – Пропорциональная гидравлика), студентам специальности “Гидравлические и пневматические машины”, специализации „Гидропривод и гидропневмоавтоматика” и “Механотроника в машиностроении” (Составители А.П. Губарев, О.С. Ганпанцурова. – Киев, НТУУ “КПИ”, 2009.- 56с.)
Составители: А.П. Губарев О.С. Ганпанцурова
Ответственный редактор: д.т.н., проф. О.М. Яхно
Рецензенты: к.т.н., доц. В.З. Аверин к.т.н., доц. А.В. Узунов
2
ВВЕДЕНИЕ
Настоящие методические указания предназначены для выполнения лабораторных работ по дисциплинам «Дискретные системы автоматического управления», «Исполнительные устройства систем механотроники», «Введение в механотронику» для студентов специальности «гидравлические и пневматические машины» специализаций «гидропривод и гидропневмоавтоматика» и «механотроника в машиностроении», а также студентов других специальностей в разделах, посвященных гидроприводу. Цель выполнения лабораторных работ – изучение средств пропорциональной гидравлики, приобретение навыков разработки схем исполнительных устройств с пропорциональным управлением, сборки и отладки систем, в том числе с комбинированным дискретно-пропорциональным управлением на экспериментальных стендах.
Гидравлические устройства с пропорциональным управлением составляют одно из наиболее перспективных направлений развития гидропривода. Они применяются в составе автоматических систем большинства технологических, производственных и вспомогательных процессов. Такие системы, как правило, состоят из устройств дискретного действия и исполнительных устройств с пропорциональным управлением. Это позволяет к традиционным функциям дискретного гидропривода добавить электронное и цифровое управление при решении аналоговых задач. Программой дисциплины предусмотрены лабораторные работы с основными типами устройств пропорциональной гидравлики: задатчиками сигналов, усилителями, клапанами давления, расхода и направления с пропорциональными магнитами.
Предлагаемый материал распределен на 5 лабораторных работ, каждая из которых содержит одну или несколько задач, заканчивающихся сборкой и отладкой системы на стендах. Первая работа посвящена изучению структуры и элементов гидропривода с пропорциональным управлением, ознакомлению с условными обозначениями, правилами монтажа и соединения электронных и электрогидравлических устройств, оборудованием экспериментальных стендов. Вторая работа рассматривает основные типы клапанов с пропорциональным управлением: распределительного клапана, клапана давления, регулятора расхода. Задачей работы является экспериментальное определение характеристик клапанов, позволяющих рассчитывать уровень сигналов управления при решении практических задач. Третья работа рассматривает пример построения многофункционального модуля циклового гидропривода, состоящего из гидравлического цилиндра, трехпозиционного пропорционального распределительного клапана и двухканального усилителя. Работа завершается разработкой схемы и настройкой оборудования по заданным эксплуатационным параметрам. В работе используется дискретное переключение уровней пропорционального сигнала. Четвертая работа посвящена построению системы гидропривода с комбинированным дискретнопропорциональным управлением. Комплексное задание работы рассматривает
3
практическую задачу привода металлообрабатывающего станка. При её решении выполняется логический синтез, производится расчет и настройка электронного блока, проводится анализ влияния нагрузки на длительность цикла. Пятая работа посвящена вопросам рационального сочетания дискретного и пропорционального управления на примере практической задачи
– гидропривода пресса бумажных отходов. Целью работы является получение навыков разработки и использования многофункциональных модулей с управляемой траекторией пропорционального сигнала и несколькими пропорциональными устройствами в одном модуле, а также обеспечение вспомогательных и сервисных функций при работе с системой: пуск и остановка системы, длительный и единичный цикл, перевод привода в начальное положение.
Каждая решаемая задача оформляется отдельным протоколом, в котором указывается номер работы, номер и содержание задания, предлагаемое решение (схема), состав и количество использованного оборудования (спецификация), технические условия сборки и пуска системы. Работа считается выполненной, если система действует в полном соответствии с условием задачи, соответствует предложенной схеме, схема выполнена в соответствии с требованиями.
При работе на стендах необходимо:
•соблюдать Правила техники безопасности;
•не включать оборудование без разрешения преподавателя.
Основным результатом выполнения лабораторных работ по разделу «Пропорциональная гидравлика» должны быть навыки составления схем, настройки и наладки электронных блоков управления, отладки систем при согласованном применении средств дискретной и пропорциональной гидравлики для решения практических задач средней сложности.
4

Лабораторная работа №1
Основные сведения об устройствах с пропорциональным управлением
Цель работы: Изучение принципа действия клапанов с пропорциональным управлением. Знакомство с особенностями пропорционального управления и его функциональными возможностями. Настройка параметров блока управления клапана.
Усовершенствование технологических процессов, а соответственно ужесточение требований, предъявляемых к гидроприводу, привели к функциональному развитию и широкому применению пропорциональной гидравлики и сервоклапанов. На сегодняшний день к пропорциональной технике относят различные типы клапанов (распределительные клапаны, клапаны давления, регуляторы расхода и т.д.) и в меньшей степени, гидронасосы (гидромоторы) с пропорциональным управлением. Основное внимание будет уделено рассмотрению функциональных возможностей и принципов работы пропорциональных распределительных клапанов.
Прежде чем рассматривать особенности пропорциональных клапанов, уточним основные отличия пропорционального управления и дискретного. В устройствах дискретного действия управляющий сигнал в различные моменты времени условно равен либо «0», либо «1» (например, двухпозиционный клапан будет или полностью закрыт, или полностью открыт). В пропорциональном клапане значение управляющего сигнала может плавно изменяться в диапазоне от «0» до «1», открывая клапан настолько, на сколько это необходимо в данный момент времени. Таким образом, пропорциональное управление позволяет плавно изменять расход или давление в соответствии с циклограммой работы привода.
Типы клапанов
По аналогии с устройствами дискретного и аналогового управления большинство пропорциональных клапанов можно распределить на 3 группы, основываясь на выполняемых ими функциях (рис. 1.1):
1)Функция перемещения – распределительные клапаны
2)Функция скорости – распределительные клапаны и регуляторы расхода
3)Функция давления (силы) – клапаны давления.
A B
P 
 T
T
а)
B |
|
A |
Y |
б) |
|
|
B |
в) |
∩G |
A |
Рисунок 1.1. Условное обозначение клапанов с пропорциональным управлением: а) - распределительного клапана, б) - редукционного клапана, в) - регулятора потока
5
Функциональные возможности пропорционального управления
Одним из основных преимуществ пропорциональной техники является расширение количества выполняемых технологических функций за счет плавного регулирования параметров (расход, давление, скорость движения, усилие), а также возможность управления работой гидропривода с помощью программируемых контроллеров (PLC).
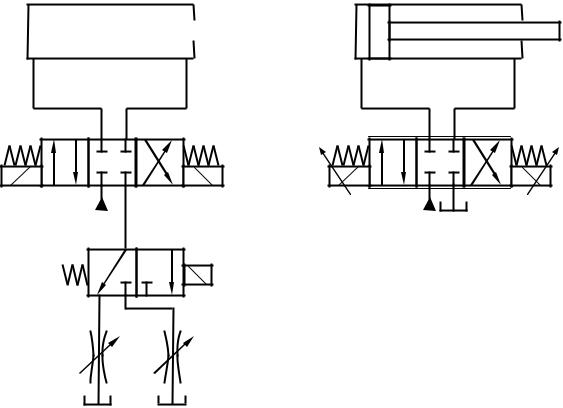
Благодаря дополнительным функциональным возможностям, за счет использования в клапане пропорциональных электромагнитов, возможно уменьшение количества устройств, необходимых для выполнения заданной операции. Например, для реализации схемы двухкаскадного регулирования скорости гидропривода с устройствами дискретного действия необходимо установить 4 гидроаппарата (рис. 1.2а). В то же время с помощью одного распределительного клапана с пропорциональным управлением можно выполнить не только ступенчатое, но и плавное регулирование скорости в обоих направлениях (рис. 1.2б).
а) |
|
|
б) |
|
|
|
|
|
|
|
|
A B A B
P |
T |
P |
T |
Рисунок 1.2. Пример замещения схемы ступенчатого регулирования скорости (а) схемой с пропорциональным распределительным клапаном (б)
Электрическое управление позволяет размещать пропорциональные клапаны непосредственно близко к исполнительным устройствам, в том числе в виде моноблоков. Вследствие этого можно минимизировать длины соединительных трубопроводов или каналов, а соответственно уменьшить путевые потери и повысить жесткость системы, что в результате приводит к улучшению динамических характеристик гидропривода.
В некоторых случаях применение пропорциональных клапанов позволяет снизить количество потребляемой электроэнергии, что дает возможность
6
говорить о повышении энергетической эффективности гидросистем. Одним из примеров снижения энергетических затрат является применение чувствительных к нагрузке систем (Load Sensing). В таких системах работа нескольких приводов может обеспечиваться одним насосом. При этом в системе контролируется и автоматически регулируется необходимый для заданной нагрузки расход (давление).
Несмотря на широкие функциональные возможности, пропорциональная техника имеет несколько ограничивающих факторов, оказывающих влияние на выбор изготовителем дискретных устройств, а не пропорциональных клапанов. В первую очередь, это относительно высокая стоимость клапанов с пропорциональным управлением по сравнению с дискретной техникой. При этом специфика пропорциональных электромагнитов предусматривает применение дополнительных устройств – усилителя, контроллера, стабилизатора напряжения и т.д. Также в системах, в составе которых есть устройства с пропорциональным управлением, предъявляются более высокие требования к типам рабочих жидкостей и тонкости их фильтрации.
Система управления пропорциональным клапаном
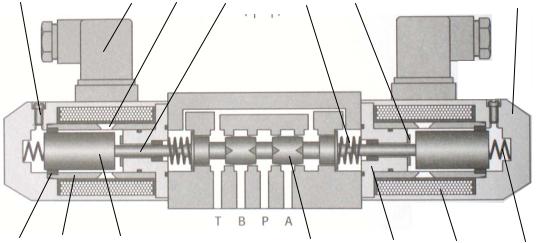
Управление золотником в пропорциональных клапанах осуществляется за счет регулируемых электромагнитов (рис. 1.3). В зависимости от величины подаваемого на электромагнит 13 входного сигнала (электрический ток), изменяется положение якоря 10, а соответственно, изменяется положение золотника 11 распределителя. Таким образом, происходит преобразование уровня электрического сигнала в положение золотника.
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
9 |
10 |
11 |
12 |
13 |
14 |
Рисунок 1.3. Принципиальная схема устройства распределительного клапана с пропорциональным управлением:
1 – вентиляционный канал; 2 – электрический разъем; 3 – немагнитное внутреннее кольцо; 4 – толкатель; 5 – центрирующая пружина; 6 – стопорный диск; 7 – корпус электромагнита; 8 – подшипник скольжения; 9 – постоянный магнит; 10 – якорь; 11 – золотник; 12 – внутренний постоянный магнит; 13 – обмотка электромагнита; 14 – прижимная пружина
7

Точность работы и класс пропорциональных клапанов оценивается такими характеристиками, как гистерезис, повторяемость, порог срабатывания, разрешающая способность, расходная и нагрузочная характеристика и другими.
Гистерезис характеризует способность золотника занимать разные положения при одном и том же уровне входного сигнала в зависимости от направления его изменения (возрастания или убывания). Возникающее при этом расхождение и будет гистерезисом клапана с пропорциональным управлением.
Порог срабатывания (чувствительность) пропорционального клапана – минимальное изменение значения входного сигнала (электрического тока), при котором якорь электромагнита начнет смещать золотник.
Рампа сигнала – скорость открытия клапана во время достижения входным сигналом (напряжение) заданного значения.
Функционально работа пропорциональных клапанов осуществляется во многом за счет дополнительного устройства – усилителя. К каждому типу клапана подбирается своя усилительная карта, с помощью которой настраиваются необходимые для работы параметры, а также происходит преобразование входного напряжения в выходной сигнал в виде электрического тока.
В лабораторном стенде «блок управления» клапанами состоит из двух отдельных модулей – задатчика сигналов и усилителя.
Задатчик сигналов (рис. 1.4а) позволяет настраивать значения входного в усилитель сигнала (напряжение от -10В до +10В), а также время переключения и рампу сигналов. Задатчик включает в себя разъемы 1, 4 для подключения основного питания (+24В и 0В), дисплей 2 для отображения уровня настраиваемых параметров, разъемы 3 для передачи выходного сигнала к усилителю, ручку 5 для выбора настраиваемых параметров, разъемы 6 для внешнего управления выходным сигналом (дискретные входы), ручку 7 для
|
а) |
1 |
|
|
|
7 |
|
2 |
|
|
б) |
3 |
Рисунок 1.4. а) Внешний вид |
||
задатчика сигналов: 1,4 – разъемы |
|||
6 |
для подключения питания; 2 – |
||
дисплей; 3 – разъемы выходного |
|||
4 |
сигнала |
(подключение |
к |
|
усилителю); 5 – выбор необходимых |
||
5 |
параметров; 6 – дискретные входы; |
||
7 – ручка настройки значений; |
|
||
|
б) Условное обозначение задатчика |
|
|
8
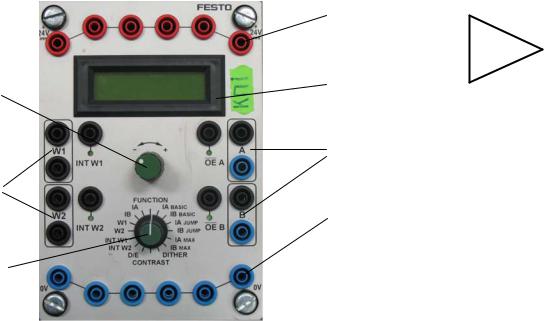
настройки необходимых значений параметров.
Функциональные возможности устройства (выбор с помощью ручки 5):
-настройка 8 различных значений уровня выходного напряжения (W1-
W8);
-функция OUT – передача заданных параметров на усилитель;
-функция D/E – выбор языка устройства (немецкий или английский);
-режим FUNCTION – настройка управления выходным напряжением (внутренний выбор количества выходных значений – от 1 до 8 или управление
спомощью дискретных входов);
-функция TIME – настройка времени переключения между различными уровнями выходных сигналов;
-настройка рампы сигнала для положительных и отрицательных значений напряжения (настройка R1-R4).
Усилитель сигналов (рис. 1.5а) преобразует входное напряжение в выходной электрический ток (0 – 1000мА), управляющий работой пропорциональных электромагнитов клапана.
Усилительная карта включает в себя: разъемы 1, 4 для подключения питания из внешней сети, дисплей 2 для отображения значений параметров, разъемы 3 для соединения усилителя с электромагнитами А и B на клапане, ручку выбора и настройки параметров 5, разъемы 6 для передачи требуемого напряжения на усилитель от задатчика сигналов, ручку 7 для настройки необходимых параметров.
|
а) |
1 |
б) |
|
|
|
|
|
|
|
|
|
|
|
|
||
7 |
|
2 |
|
|
|
|
|
|
|
3 |
Рисунок 1.5. а) Внешний вид |
||||||
|
|
|||||||
|
|
усилителя: 1,4 – подключение |
||||||
6 |
|
|
питания; 2 – дисплей; 3 – |
|||||
|
|
подключение |
электромагнитов |
|||||
|
|
4 |
клапана; 5 – выбор необходимых |
|||||
|
|
|
параметров; 6 – подключение |
|||||
5 |
|
|
входного |
напряжения; |
7 |
– |
||
|
|
настройка параметров; |
|
|
||||
|
|
|
б) Условное обозначение усилителя |
|||||
|
|
|
сигналов |
|
|
|
|
|
Спомощью ручки 5 можно выбрать и задать следующие параметры:
-начальный ток на выходах А и В (функции IA basic, IB basic) – значения уровня тока, который будет подаваться на электромагнит вне зависимости от входного сигнала. Применяется для компенсации начального смещения золотника или задания требуемого уровня сигнала до включения программы управления;
9
-прыжковый ток (функциональный выбор IA jump и IB jump);
-максимальный ток (функция IA max, IB max) – наибольшее значение подаваемого на электромагнит тока. В данном усилителе значение максимального тока составляет 1000 мА;
-частота Дитера;
-функция D/E – выбор языка устройства (английский или немецкий);
-функции INT W1 и INT W2 – внутренняя настройка входных сигналов (без применения задатчика сигналов);
-функции W1 и W2 – просмотр значений входных сигналов;
-функции IA и IB – просмотр уровня тока, подаваемого на электромагниты А и В соответственно;
-режим FUNCTION – настройка режима работы усилителя. Режим одноканального усилителя применяется для управления работой клапанов с одним электромагнитом (регуляторов расхода, клапанов давления и т.д.). Режим двухканального усилителя обеспечивает работу распределительных клапанов с двумя пропорциональными электромагнитами.
Контрольные вопросы
1.Чем отличается дискретное управление от пропорционального?
2.Может ли пропорциональный распределительный клапан функционально заменить регулятор потока?
3.Является ли сервоклапан разновидностью пропорционального клапана?
4.За счет чего распределительный клапан с пропорциональным управлением может выполнять функцию регулирования расхода?
5.Может ли быть редукционный клапан с пропорциональным управлением?
6.Какие основные преимущества устройств с пропорциональным управлением по сравнению с устройствами дискретного действия?
7.Как будет работать распределительный клапан (рис. 1.6) если на управляющие магниты подавать дискретные сигналы?
8.Какие функциональные блоки обеспечивают работу пропорционального клапана?
9.Какой параметр имеет постоянную величину при работе клапана, если управляющий сигнал будет иметь постоянное значение?
10.Почему в цепи управления клапана используется два блока (задатчик и усилитель), а не один блок, задающий выходной сигнал?
11.Зачем нужны сигналы положительного и отрицательного значения?
12.Как правильно задать скорость формирования сигнала и что при этом необходимо учитывать?
10