

3.3. Алгоритм программы моделирования системы управления подвижным объектом.
По математической модели составлена программа моделирования, в которую вводятся выбранные эпохи системы управления. На рисунке 3. представлен алгоритм программы моделирования полета ракеты.
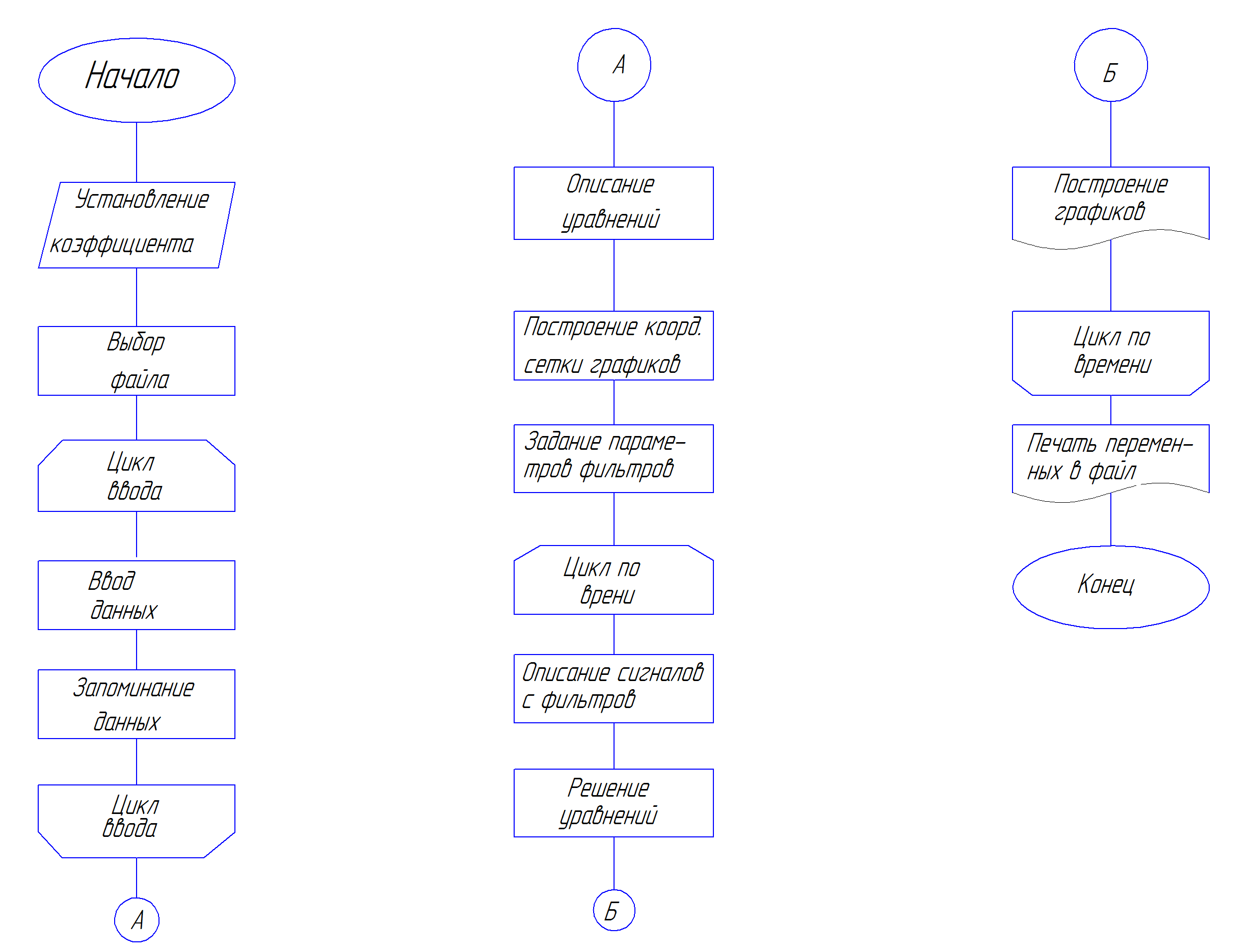
Рисунок 13. Алгоритм программы моделирования полета ракеты.
3.4. Интерфейс пользователя.
В данном диплом проекте для моделирования полета ракеты мы воспользовались языком программирования Visual Basic . С помощью программы моделирования мы можем наблюдать визуальный полет ракеты (траектория полета ракеты на рис 4.1. обозначена розовым цветом). Так же можно наблюдать как измениться полет ракеты если изменить один из параметров в программе.
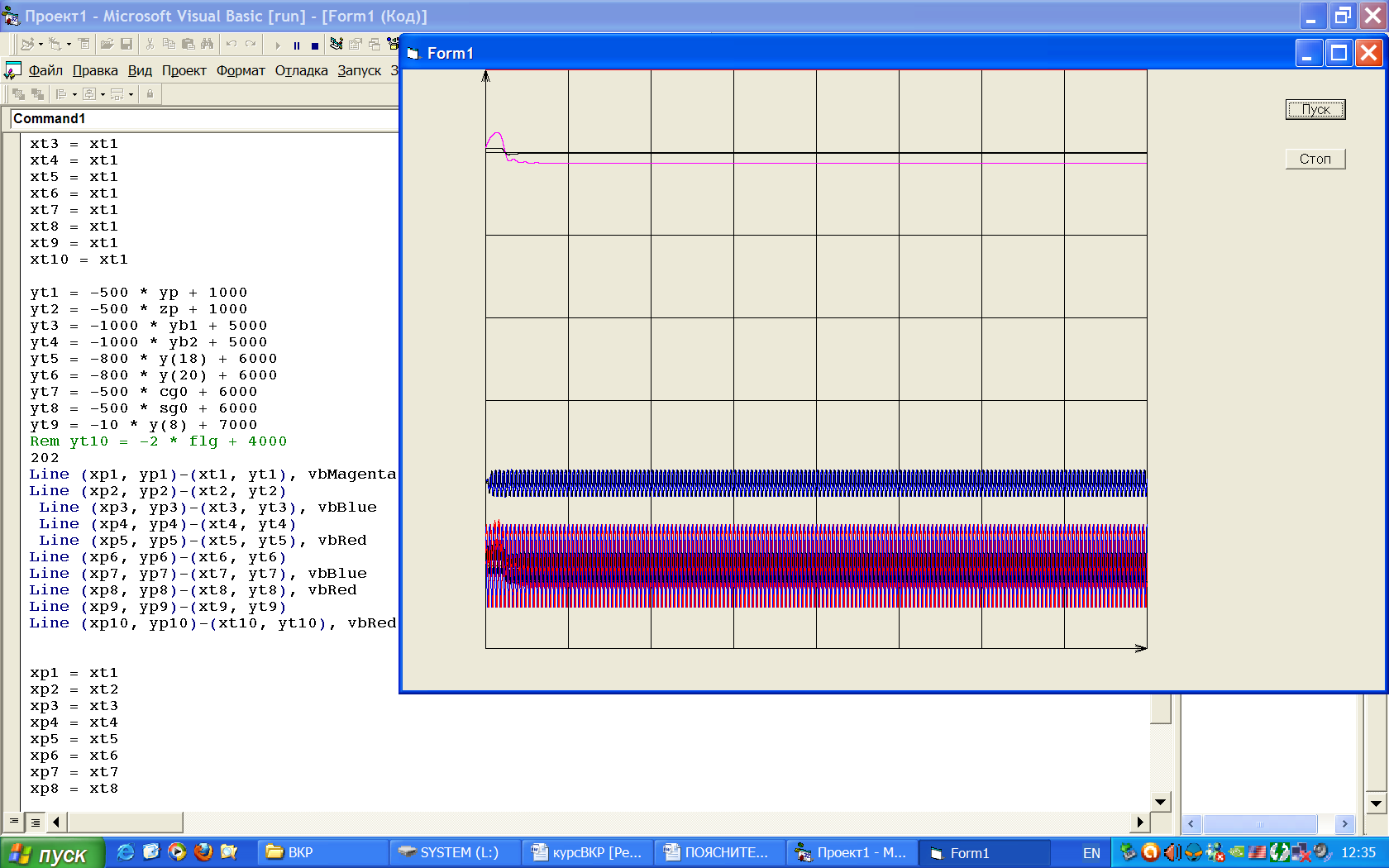
Рисунок 14.Интерфейс пользователя.
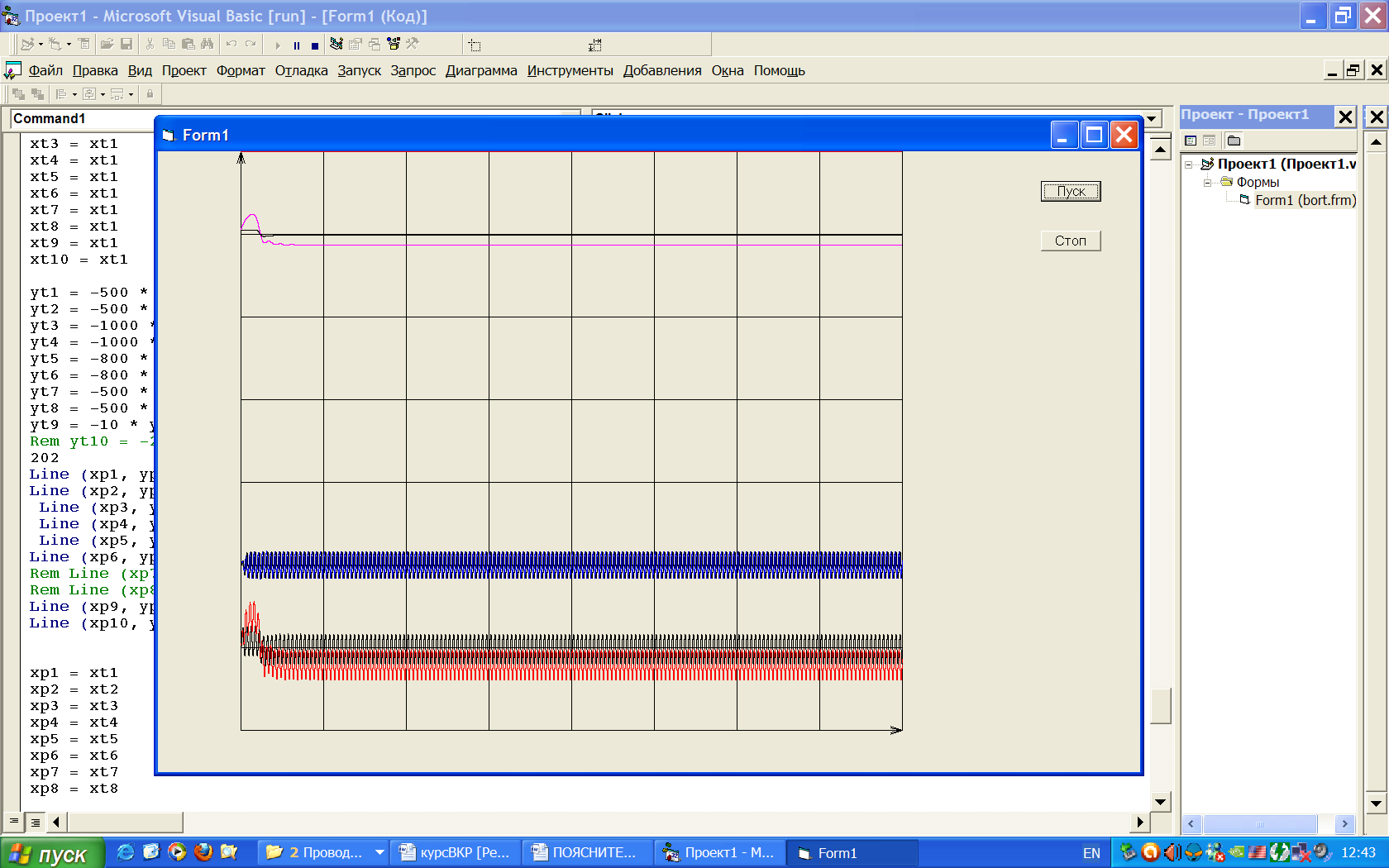
Рисунок 4.2.Интерфейс пользователя.
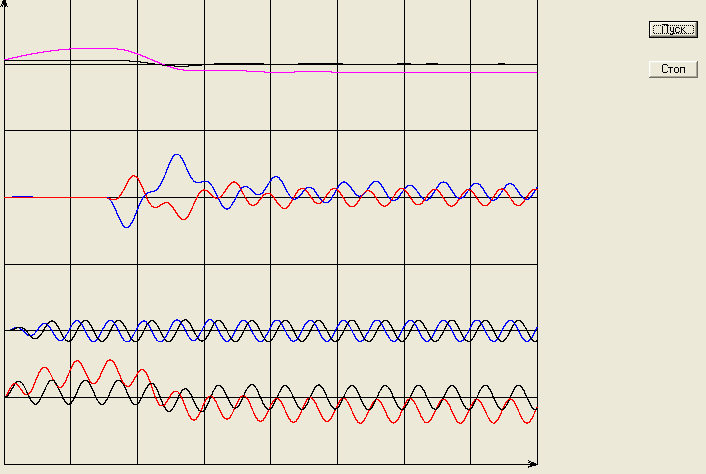
Рисунок 15. Интерфейс пользователя.
3.6. Результаты моделирования.
Ниже представлены результаты моделирования полета ракеты. График показывает моделированный полёт ракеты, переходный процесс на начальном участке и проседание от линии визирования. Динамическая ошибка – проседание ракеты – после окончания переходного процесса постоянна и соответствует расчетной [5].
В результате моделирования были выбраны углы пуска ракеты.

Рисунок 16. Интерфейс программы математического моделирования.
Результаты моделирования динамики системы управления при полете на время tП + 1,6 с.
На верхнем графике – отклонения центра масс ракеты от оси луча, YP – розовый, ZP – черный. Динамическая ошибка от действия ускорения свободного падения (проседание ракеты под осью) не превышает 0,25 м, что соответствует расчетам. На втором графике – углы атаки и скольжения. Отчетливо видна составляющая на частоте вращения ракеты по углу крена (ωКР = 2π ∙10 1/c), однако она не превышает 1ۨ, что вполне допустимо. На третьем графике приведены выходные сигналы фильтров Баттерворта, используемых для выделения сигнала крена из выходных сигналов аппаратуры выделения координат. Видно, что составляющая, пропорциональная отклонению центра масс, не проходит на выходы фильтра и не мешает использованию его для модуляции – преобразования команд из земной системы координат (связанной с лучом) в связанную с ракетой. На четвертом графике – выходные сигнала АВК. Видно, что из-за смещения фотоприемника они содержат составляющую, соответствующую синусу и косинусу угла крена.
Заключение
Таким образом, в данной работе разработана система управления безгироскопной ракетой, для этого выбран дифференцирующий корректирующий фильтр, а также определен коэффициент системы управления по разомкнутому контуру КР = 36,6 1/с2. Коэффициент передачи системы управления КСУ = 6 град/м. В совокупности с коэффициентом передачи ракеты по перегрузке КСНV = 6,1 м/(сек2 град). При таком коэффициенте динамическая ошибка от действия ускорения свободного падения составит hД = 9,81 / 36,6 = 0,27 м.
Кроме этого, задан угол фазирования равный 0,при постоянной времени АВК = 0,012 мс, разработана математическая модель подвижного объекта и системы управления, обеспечена устойчивость полета. По результатам моделирования получены графические зависимости, позволяющие увидеть траекторию полета ракеты на начальном участке, а так же определены углы атаки из-за неподавления сигнала крена, которые составили около 1 градуса.
По соответствующим графикам можно сделать вывод о том, что данная система управления работает в том случае, если вращение ракеты имеет постоянное значение, либо отклоняется таким образом, что условно это вращение можно считать постоянным. Расположенный на крыле фотоприёмник, с которого идёт съём информации, на устойчивость системы не влияет. Колебания по углу атаки малые, можно считать допустимыми.
Предложенная структура системы управления намного проще, чем у прототипа – комплекса «Метис».
Изменения параметров системы в условиях реального полета, приводящие к нарушению фазирования системы (прежде всего, частота вращения по крену) могут быть скомпенсированы введением автоматической регулировки параметров разделительного фильтра Баттерворта.