

3. Выбор структуры разрабатываемой системы.
Рассмотрим структуру системы, включающую в себя несколько функциональных блоков, представленных на рисунке 1,
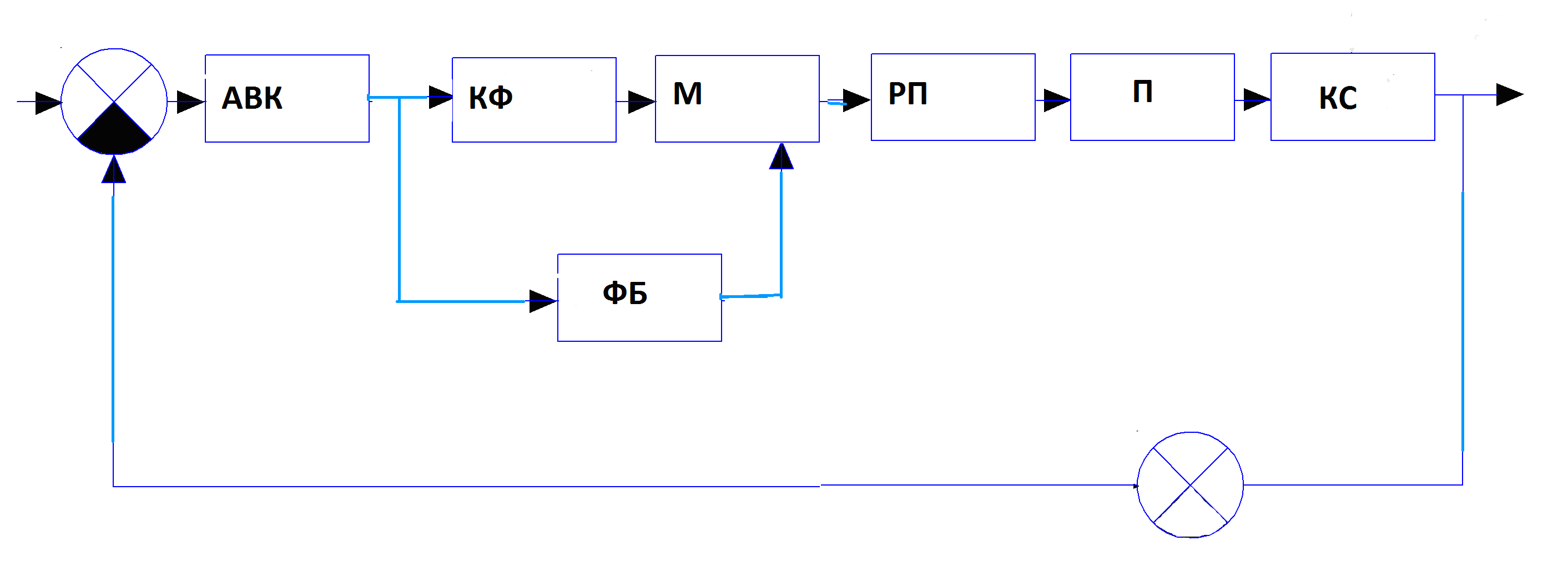
Рисунок 1 - Функциональная схема системы управления подвижным объектом.
АВК – аппаратура выделения координат, предназначенная для преобразования улавливаемого фотоприемником сигнала луча в напряжение, пропорциональное отклонению подвижного объекта от его оси.
В модели не рассматриваются характеристики луча, который может быть непрерывным или импульсным. В первом случае информация об отклонении заключается в разности времени приема частот модуляции луча. Во втором команды могут быть зашифрованы в длительности пачек импульсов, расстоянии между импульсами и так далее;
КФ – корректирующий фильтр, характеристики которого выбираются разработчиком системы управления из условия обеспечения ее устойчивости.
Без
корректирующего фильтра система
структурно неустойчива и не обеспечивает
выполнения основной задачи попадания
ПО в карточку или в цель. В данной системе
выбран дифференцирующий КФ с разносом
n=6,
обеспечивающий максимальное опережение
по фазе
![]() градусов.
Это простейший фильтр, к недостаткам
которого следует отнести подчеркивание
высокочастотных шумов в системе
управления.
градусов.
Это простейший фильтр, к недостаткам
которого следует отнести подчеркивание
высокочастотных шумов в системе
управления.
РП – рулевой привод, иначе говоря, - электромеханический преобразователь, который отклоняет рули (органы управления) на угол, пропорциональный смещению фотоприёмника на крыле ракеты. Как правило угол отклонения рулей имеет механические ограничения. В представленной модели это не рассматривается. Приводы могут быть релейными, колебательными, пропорциональными и тд. В нашем случае представлена упрощенная модель пропорционального привода [3].
ФБ – полосовой фильтр Баттерворта.
М – модулятор.
КС – кинематические соотношения.
В следующей главе будет приведено математическое описание системы управления подвижным объектом и математическое описание самого подвижного объекта. Здесь же остановимся подробнее на исходных данных системы, необходимых для дальнейшего моделирования, учитывая их индекс в листинге программы. Для этого сведем их в таблицы.
Таблица 1: Параметры фильтра и гирокоординатора.
|
Идентиф. |
Значение |
Размерность |
Наименование |
|
qf1 |
1 |
В/В |
коэфф-т передачи КФ в канале 1 |
|
qf2 |
1 |
В/В |
коэфф-т передачи КФ в канале 2 |
|
tf1y |
0.27 |
c |
пост. времени КФ в канале 1 |
|
tf1z |
0.27 |
c |
пост. времени КФ в канале 1 |
|
tf2y |
0.045 |
c |
пост. времени КФ в канале 2 |
|
tf2z |
0.045 |
c |
пост. времени КФ в канале 2 |
|
ukb |
-0 |
В |
программная команда |
Таблица 2: Параметры рулевого привода.
|
Идентиф. |
Значение |
Размерность |
Наименование |
|
Rp1 |
6 |
Град/В |
коэфф-т передачи РП в канале 1 |
|
Rp2 |
6 |
Град/В |
коэфф-т передачи РП в канале 2 |
|
Trp1 |
0.005 |
с |
постоянная времени РП в канале 1 |
|
Trp2 |
0.005 |
с |
постоянная времени РП в канале 2 |
Таблица 3: Параметры, связанные с подвижным объектом.
|
Идентиф. |
Значение |
Размерность |
Наименование |
|
anwz |
0 |
ед. |
Признак наличия ветра |
|
ag |
1 |
ед. |
Признак наличия веса |
|
vh |
300 |
м/с |
Начальная скорость изделия |
|
hi0 |
174.1 |
кг/с |
Единичный импульс РД |
|
tg0 |
60 |
кг |
Тяга РД |
|
ts0 |
0.1 |
с |
Время вкючения РД |
|
tw |
3.5 |
с |
Время выключения РД |
|
s |
0.01225 |
м кв |
Площадь миделевого сечения |
|
als |
1 |
м |
Длина изделия |
|
hm |
1.081 |
т.е.м |
Начальная масса изделия |
|
hk |
0.912 |
т.е.м |
Конечная масса изделия |
|
xix0 |
0.00317 |
кг.м.с кв |
Момент инерции изделия |
|
xixk |
0.00261 |
кг.м.с кв |
Момент инерции изделия |
|
ziz0 |
0.0642 |
кг.м.с |
Момент инерции изделия |
|
zizk |
0.0545 |
кг.м.с |
Момент инерции изделия |
|
xt0 |
0.522 |
м |
Начальное положение ц.т. изделия |
|
xtk |
0.533 |
м |
конечное положение ц.т. изделия |
|
ta |
0.5 |
град. |
начальный угол тангажа |
|
pch |
0 |
град. |
начальный угол рыскания |
|
teh |
0.5 |
град. |
нач.угол наклона траектории |
|
fih |
0 |
град. |
нач.угол поворота траектории |
|
dct |
2 |
град. |
угол разворота стабилизаторов |
|
g00 |
120 |
град. |
начальный угол крена |
|
feks |
0 |
град. |
фаза экцентриситета |
|
pcht |
0 |
1/с |
возмущение по рысканию |
|
tth |
0 |
1/с |
возмущение по тангажу |
|
ght |
0 |
Гц |
начальная скорость по крену |
|
dh |
0.001 |
м |
начальная дальность |
|
yh |
0.12 |
м |
начальная координата Yo |
|
zh |
0.1 |
м |
начальная координата Zo |
|
ham |
0.001 |
м |
начальная высота работы Ho |
|
eks |
0 |
м |
эксцентриситет тяги |