

4.4. Расчет погрешностей косвенных измерений
Для расчета абсолютной
![]() и относительной
и относительной![]() погрешностей косвенного измерения
величины
погрешностей косвенного измерения
величины![]() ,
являющейся функцией нескольких измеряемых
величина,b,c,
необходимо определить погрешности
каждой величины (
,
являющейся функцией нескольких измеряемых
величина,b,c,
необходимо определить погрешности
каждой величины (![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() )
по схеме, описанной в разделе 4.3.
)
по схеме, описанной в разделе 4.3.
Если значение искомой величины
![]() находится по формуле
находится по формуле
![]() ,
,
где
![]() ,
,![]() и
и![]() – любые числа, то относительная
погрешность
– любые числа, то относительная
погрешность![]() равна
равна
![]() ,
(7)
,
(7)
а абсолютная погрешность
![]() находится по формуле
находится по формуле
![]() %,
%,
где
![]() .
.
Например, измеряется косвенно объем
![]() цилиндра, диаметр которого
цилиндра, диаметр которого![]() ,
высота
,
высота![]()
![]() .
.
Относительная
![]() и абсолютная
и абсолютная![]() погрешности измерения объема цилиндра
равны:
погрешности измерения объема цилиндра
равны:
![]() %, (8)
%, (8)
где среднее значение объема
![]() цилиндра определяется соотношением
цилиндра определяется соотношением
![]() .
(9)
.
(9)
Рассчитать погрешности прямых и косвенных измерений объема предложенного вам тела.
Результаты занести в табл. 2, которую нужно составить самостоятельно.
Вывод должен показать, что студент освоил методику расчета погрешностей прямых и косвенных измерений.
ЛАБОРАТОРНАЯ РАБОТА № 2
Изучение законов движения системы связанных тел
1. Цель работы: освоить методику экспериментального определения кинематических и динамических характеристик системы связанных тел; приобрести навыки применения уравнений динамики поступательного и вращательного движения на примере системы связанных тел.
2. Оборудование: экспериментальная установка (стойка с вращающимся столиком), стержень, груз с нитью, секундомер, штангенциркуль, масштабная линейка.
3. Подготовка к работе:а) изучить необходимые теоретические положения по учебникам: [1] §§ 4, 16, 18; [2] §§ 2.4, 4.1; [3] §§ 2.2, 2.4, [4]; б) ответить на вопросы для самоподготовки 5–10. Для выполнения работы необходимо: а) знать основные кинематические и динамические параметры поступательного и вращательного движения (скорость, ускорение, угловая скорость, угловое ускорение, масса, сила, момент силы, момент инерции); б) знать уравнения кинематики и динамики поступательного и вращательного движения; в) знать закон сохранения механической энергии; г) уметь пользоваться измерительными приборами.
4. Выполнение работы
Описание установки
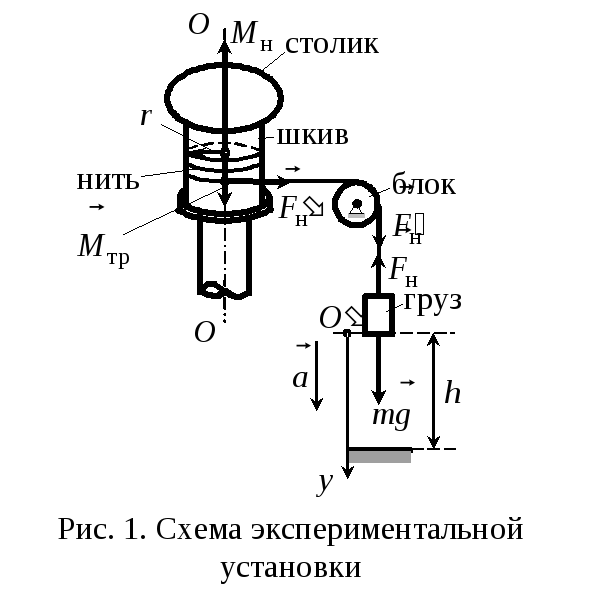
Экспериментальная установка (рис. 1)
состоит из стойки с укреплённым на ней
с помощью подшипника шкивом и столика,
жёстко связанного со шкивом. Шкив и
столик имеют общую ось вращения
![]() .
На шкив наматывается нить, перекинутая
через блок, ко второму концу которой
подвешивается груз массойm.
Опускаясь с высотыh,
груз приводит во вращательное движение
шкив со столиком. Считая нить нерастяжимой,
пренебрегая ее массой и массой блока,
можно рассматривать данную систему как
систему двух связанных тел. При этом
массаmгруза должна
быть достаточной для обеспечения
равноускоренного движения указанных
тел.
.
На шкив наматывается нить, перекинутая
через блок, ко второму концу которой
подвешивается груз массойm.
Опускаясь с высотыh,
груз приводит во вращательное движение
шкив со столиком. Считая нить нерастяжимой,
пренебрегая ее массой и массой блока,
можно рассматривать данную систему как
систему двух связанных тел. При этом
массаmгруза должна
быть достаточной для обеспечения
равноускоренного движения указанных
тел.
4.2. Методика измерений и расчета кинематических характеристик
4.2.1. Намотайте на шкив
нить, перекиньте её через блок и к
свободному концу нити прикрепите груз.
С помощью масштабной линейки задайте
высоту h груза
относительно выбранного уровня (во всех
опытах эта величина должна быть
одинаковой). Отпуская груз, одновременно
включите секундомер, выключите его,
когда груз достигнет этого уровня.![]() Определите
времяtпадения груза
не менее 5 раз. Данные измерений занесите
в табл. 1.
Определите
времяtпадения груза
не менее 5 раз. Данные измерений занесите
в табл. 1.
4.2.2. Для определения
скорости груза![]() и его ускорения
и его ускорения![]() в
конце его поступательного движения
направим ось
в
конце его поступательного движения
направим ось![]() вдоль движения груза (см. рис. 1). Так как
начальная скорость груза равна нулю,
то проекция
вдоль движения груза (см. рис. 1). Так как
начальная скорость груза равна нулю,
то проекция![]() скорости его движения на ось
скорости его движения на ось![]() имеет вид
имеет вид
![]() ,
(1)
,
(1)
где
![]() – проекция вектора
– проекция вектора![]() ускорения груза;
ускорения груза;
![]() – время его движения. Координатаугруза со временем изменяется по уравнению
– время его движения. Координатаугруза со временем изменяется по уравнению
![]() .
(2)
.
(2)
Пройденный грузом путь за время
![]() равен
равен![]() .
Решая систему уравнений (1) и (2), находим
расчетные формулы для конечной скорости
груза
.
Решая систему уравнений (1) и (2), находим
расчетные формулы для конечной скорости
груза![]()
![]() (3)
(3)
и его ускорения
![]()
![]() .
(4)
.
(4)
Все кинематические характеристики рассчитывают по одному разу, используя среднее значение времени t.
Таблица 1
Кинематические характеристики движения груза
и шкива со столиком
h = (м); r = (м); m = (кг)
|
№ п/п |
t, c |
t, c |
м/с |
a, м/с2 |
с–1 |
с–2 |
рад |
N, об |
|
1 |
|
|
|
|
|
|
|
|
|
2 |
| |||||||
|
3 |
| |||||||
|
4 |
| |||||||
|
5 |
|
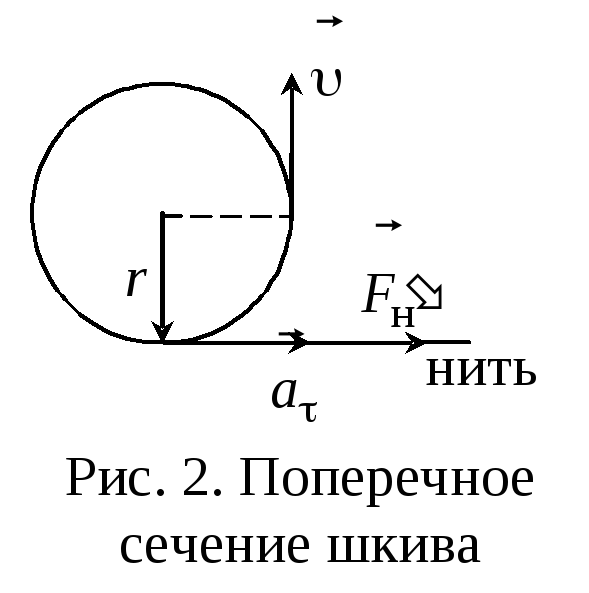
4.2.3. Равноускоренное вращательное
движение шкива со столиком происходит
под действием силы натяжения нити
![]() ,
создаваемой грузом. Точки поверхности
шкива вращаются с тангенциальным
ускорением
,
создаваемой грузом. Точки поверхности
шкива вращаются с тангенциальным
ускорением![]() ,
равным ускорению
,
равным ускорению![]() поступательного движения груза. Равны
линейная скорость
поступательного движения груза. Равны
линейная скорость![]() точек поверхности шкива и скорость
точек поверхности шкива и скорость![]() поступательного движения груза. Вращение
столика со шкивом является равноускоренным
без начальной угловой скорости. Линейные
поступательного движения груза. Вращение
столика со шкивом является равноускоренным
без начальной угловой скорости. Линейные![]() и угловые
и угловые![]() характеристики в момент времени
характеристики в момент времени![]() связаны соотношениями
связаны соотношениями
![]()
 (5)
(5)
![]() ,
(6)
,
(6)
где
![]() – радиус шкива.
– радиус шкива.
4.2.4. Используя значения
![]() ,
,![]() ,
,![]() и
и![]() рассчитайте угол
рассчитайте угол![]() поворота радиуса шкива
поворота радиуса шкива
![]() или
или![]() (7)
(7)
и число N его оборотов
![]() .
(8)
.
(8)
Результаты расчета косвенных измерений занесите в табл. 1.
4.2.5.
Положите на столик стержень. Повторите
измерения времени![]() падения груза с заданной высотыh.
Вычислите кинематические характеристики
груза и столика со стержнем. Результаты
занесите в табл. 2 (аналогично табл. 1).
падения груза с заданной высотыh.
Вычислите кинематические характеристики
груза и столика со стержнем. Результаты
занесите в табл. 2 (аналогично табл. 1).