

3.9. Колебания синхронной машины при параллельной работе
Свободное колебание ротора синхронной машины
при внезапном изменении внешнего момента
При установившемся
режиме работы положение ротора СМ
относительно поля определяется углом
 .
В первом приближении этот угол можно
считать равным углу между векторами
ЭДС возбуждения
.
В первом приближении этот угол можно
считать равным углу между векторами
ЭДС возбуждения и напряжением
и напряжением .
.
Допустим, что
неявнополюсная СМ работает в режиме
генератора параллельно с мощной сетью.
При этом внешний момент
 (момент первичного двигателя)
уравновешивается электромагнитным
тормозным моментом машины
(момент первичного двигателя)
уравновешивается электромагнитным
тормозным моментом машины ,
т. е.
,
т. е. .
На угловой характеристике этому режиму
соответствует точка 1 и угол
.
На угловой характеристике этому режиму
соответствует точка 1 и угол (рис. 3.47,а).
(рис. 3.47,а).
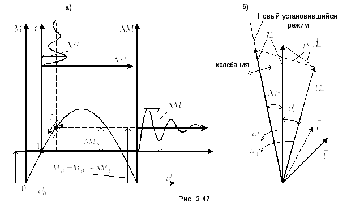
Пусть в момент
времени
 внешний момент скачкообразно изменяется
до величины
внешний момент скачкообразно изменяется
до величины .
В результате возникает избыточный
вращающийся момент
.
В результате возникает избыточный
вращающийся момент под действием которого, скорость ротора
будет расти с ускорением
под действием которого, скорость ротора
будет расти с ускорением
 ,
,
где
J
– момент инерции ротора;
 – угловая скорость ротора.
– угловая скорость ротора.
Это
увеличение скорости и нарастание угла
 будет происходить до тех пор, пока
внешний момент преобладает над моментом
генератора. Равновесие этих моментов
наступает в точке 2, в которой
будет происходить до тех пор, пока
внешний момент преобладает над моментом
генератора. Равновесие этих моментов
наступает в точке 2, в которой .
Однако при этом режим не устанавливается,
и скорость продолжает расти с отрицательным
ускорением за счет запасенной кинетической
энергии ротора. При некотором значении
.
Однако при этом режим не устанавливается,
и скорость продолжает расти с отрицательным
ускорением за счет запасенной кинетической
энергии ротора. При некотором значении увеличение угла нагрузки достигает
максимального значения
увеличение угла нагрузки достигает
максимального значения ,
после чего скорость ротора начинает
уменьшаться, причем будет уменьшаться
и угол нагрузки и т.д. Колебания ротора
будут продолжаться до тех пор, пока
машина не займет нового устойчивого
положения, определяемого точкой 2.
,
после чего скорость ротора начинает
уменьшаться, причем будет уменьшаться
и угол нагрузки и т.д. Колебания ротора
будут продолжаться до тех пор, пока
машина не займет нового устойчивого
положения, определяемого точкой 2.
Колебания
угла
 равносильны колебаниям вектора
равносильны колебаниям вектора (рис. 3.47, б).
(рис. 3.47, б).
Для математического
описания движения ротора, при колебаниях,
удобно выразить момент В зависимости
от начального угол
 и его приращения
и его приращения .
С этой целью через эти величины выразим
следующие параметры.
.
С этой целью через эти величины выразим
следующие параметры.
1. Электрическая
угловая скорость ротора в предположении
однополупериодной модели
 .
.
2. Угловная скорость
ротора
 .
.
3. Скольжение ротора
 .
.
4. Угловое ускорение
ротора
 .
.
5. Синхронный
электромагнитный момент, действующий
на ротор, при угле
 будет
будет ,
,
где
 - коэффициент синхронизирующего момента.
- коэффициент синхронизирующего момента.
В случае неявнополюсной СМ имеем
 ,
,
 .
.
6. Асинхронный электромагнитный момент взаимодействия токов, индуктированных в демпферной обмотке и обмотке возбуждения с результирующем полем.
При малых скольжениях этот момент можно записать следующим образом
 ,
,
где
 – коэффициент демпфирования.
– коэффициент демпфирования.
За положительное направления синхронного момента будем считать направление в сторону вращения ротора.
Таким образом, уравнение движения ротора СМ после внезапного изменения внешнего момента можно записать в виде
 ,
,
или
 и
и
 .
.
Преобразуя данное уравнение, получим линейное дифференциальное уравнение
 .
(3.11)
.
(3.11)
Решение этого уравнения может быть представлено как сумма двух решений: решения однородного уравнения

и частного решения для установившегося режима работы.
Общее решение для линейного дифференциального уравнения имеет вид
 ,
,
где С1, С2 – постоянные интегрирования,
 –корни
характеристического уравнения.
–корни
характеристического уравнения.
 ,
,
Отсюда
При очень малом демпфировании, то есть при
 ,
корни уравнения являются сопряженными
комплексными корнями
,
корни уравнения являются сопряженными
комплексными корнями
 ,
где
,
где – коэффициент затухания;
– коэффициент затухания; – угловая частота свободных колебаний
ротора.
– угловая частота свободных колебаний
ротора.
В этом случае общее решение может быть записано в виде
 ,
,
где
 – постоянные подлежащие определению.
– постоянные подлежащие определению.
Частное решение
уравнения (3.11) соответствует установившемуся
режиму, то есть
 .
Так как в установившемся режиме
.
Так как в установившемся режиме
 ,
,
 ,
то
,
то .
.
Из начальных условий:
 и при малом
демпфировании (
и при малом
демпфировании ( )
имеем
)
имеем
 .
.
Откуда
 .
.
 и так как
и так как
 ,
то
,
то .
Откуда
.
Откуда .
.
Окончательно колебания ротора при внезапном изменении внешнего момента можно записать в виде
 .
.
Чем
больше момент инерции, тем меньше
 ,
тем меньше частота собственных колебаний
,
тем меньше частота собственных колебаний Гц.
Гц.
При параллельной работе СМ возможно возникновение качания ротора. При этом если частота свободных колебаний ƒ0 близка к ƒ1, то возможно явление резонанса СМ, т.е. раскачивание ее. Поэтому, при расчете стремятся, чтобы ƒ0 значительно отличалась от ƒ1.
Следует иметь в
виду, что чем частота
 близка к частоте свободных колебаний
близка к частоте свободных колебаний ,
то возможен резонанс, в результате
которого происходит раскачивание машины
и выход ее из синхронизма. Поэтому, при
расчете следует исключать близость
,
то возможен резонанс, в результате
которого происходит раскачивание машины
и выход ее из синхронизма. Поэтому, при
расчете следует исключать близость и
и .
.
Динамическая устойчивость синхронной машины
Под динамической устойчивостью СМ следует понимать способность СМ удерживаться в синхронизме, при внезапном изменении параметров машины, т.е. при переходных режимах.
Для
пояснения воспользуемся угловой
характеристикой неявнополюсного СГ.
Допустим СГ работает в установившемся
режиме, которому соответствует точка
А
на угловой характеристике 1 при угле
нагрузки
 (рис. 3.48). Эта точка соответствует
начальному напряжению
(рис. 3.48). Эта точка соответствует
начальному напряжению .
Угловая характеристика представляет
собой синусоиду
.
Угловая характеристика представляет
собой синусоиду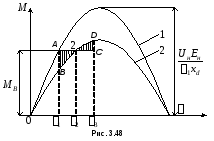
 .
.
При внезапном
уменьшении напряжения от
 до
до произойдет существенное изменение
электромагнитного момента генератора.
Его величина будет определяться точкой
лежащей на любой угловой характеристике
2
произойдет существенное изменение
электромагнитного момента генератора.
Его величина будет определяться точкой
лежащей на любой угловой характеристике
2
(рис.
3.48), соответствующей напряжению
 .
При уменьшении нагрузки угол
.
При уменьшении нагрузки угол ,
ввиду значительной инерции СМ, не сможет
измениться сразу, т. е. он остается
прежним. Появляется избыточный внешний
момент, под действием которого ротор
может ускоряться и увеличивать угол
,
ввиду значительной инерции СМ, не сможет
измениться сразу, т. е. он остается
прежним. Появляется избыточный внешний
момент, под действием которого ротор
может ускоряться и увеличивать угол .
При
.
При наступает равенство моментов
наступает равенство моментов .
Однако в точке 2 не произойдет остановка
ротора. Угол
.
Однако в точке 2 не произойдет остановка
ротора. Угол будет
увеличиваться, при чем ротор будет
затормаживаться под действием
электромагнитного тормозного момента
СГ. Увеличение угла
будет
увеличиваться, при чем ротор будет
затормаживаться под действием
электромагнитного тормозного момента
СГ. Увеличение угла
 до величины
до величины
 происходит до тех пор, пока не израсходуется
вся запасенная кинетическая энергия,
определяемая площадью
происходит до тех пор, пока не израсходуется
вся запасенная кинетическая энергия,
определяемая площадью ,
т. е. пока ротор не займет положение в
точкеD
на угловой характеристике и не наступит
равенства
,
т. е. пока ротор не займет положение в
точкеD
на угловой характеристике и не наступит
равенства
 .
.
Машина
будет оставаться в синхронизме, пока
площадь
 не превзойдет предельную площадь
торможения
не превзойдет предельную площадь
торможения .
.