

-
Кинематический расчёт механизма.
-
Определение размеров звеньев.
радиус
кривошипа r=
ОА=0,5 =
= м.
=
= м.
длина шатуна l= АВ=ОА/λ= = м.
По
полученным размерам вычерчиваем в
масштабе схему механизма в положении
 (рис.
1).
(рис.
1).
-
Аналитическое определение перемещений, аналогов скоростей и ускорений ползуна.
При
значениях
 для определения перемещения, аналогов
скорости и ускорения ползуна можно
использовать приближенные зависимости:
для определения перемещения, аналогов
скорости и ускорения ползуна можно
использовать приближенные зависимости: .
.
 .
.
S′′=r(Cos ).
).
Угол наклона шатуна относительно оси Х

Результаты расчётов сведены в табл.1 и представлены на графике (рис.2).
Для положения
 здесь и далее во всей работе даётся
пример расчётов.
здесь и далее во всей работе даётся
пример расчётов.
S= = м.
S′= = м.
S′′= = м.
 =
град.
=
град.
1.3 Определение скоростей и ускорений методом планов.
Угловая скорость кривошипа считается в 1 и 2 этапах работы постоянной
 =
= ср=
ср= n1/30=
= с-1.
n1/30=
= с-1.
Построение плана скоростей (рис.3).
Используется векторное уравнение сложения скоростей в плоском движении
 .
.
Вектор
 направлен перпендикулярно ОА в сторону
направлен перпендикулярно ОА в сторону
 .
.
Угловая скорость кривошипа считается в 1 и 2 этапах работы постоянной
 =
= n1/30=
= с-1.
n1/30=
= с-1.
VA= = м/с.
Линия действия скорости VB проходит вдоль оси Х. Линия действия относительной скорости VBA перпендикулярна линии АВ шатуна.
Из полюса р откладываем VA в виде отрезка ра=100 мм. Масштаб плана скоростей KV=(VA/pa )= = (м/с)/мм.
Из точек р и а проводятся, соответственно линии действия скоростей VB и
VBA. Точка b пересечения этих линий определяет величины векторов.
 =
= м/с.
=
= м/с.
 =
= м/с.
=
= м/с.
Cравниваем полученный результат с аналитическим.
VB=
S′* =
=
м/с.
=
=
м/с.
Построение плана ускорений (рис 4).
Используется векторное уравнение сложения ускорений в плоском движении.
 .
.
Так
как считаем
 постоянной ,
постоянной ,
 =
= м/с2.
=
= м/с2.
Вектор
 направлен параллельно ОА к центру
вращения. Центростремительное ускорение
направлен параллельно ОА к центру
вращения. Центростремительное ускорение
 направлено параллельно шатуну от точки
В к точке А.
направлено параллельно шатуну от точки
В к точке А.
 =
= м/с2.
=
= м/с2.
Из
полюса
 проводим отрезок
проводим отрезок
 =100мм., изображающий вектор
=100мм., изображающий вектор
 .
Масштаб плана ускорений Кa=aцА/qa=
= (м/с2)/мм.
.
Масштаб плана ускорений Кa=aцА/qa=
= (м/с2)/мм.
Далее,
из точки
 откладываем
откладываем
 в виде отрезка
в виде отрезка
 параллельно АВ в направлении от точки
В к точке А.
параллельно АВ в направлении от точки
В к точке А.
 = = мм.
= = мм.
.Из
точки
 проводим линию действия
проводим линию действия
 перпендикулярно шатуну АВ, а из полюса
перпендикулярно шатуну АВ, а из полюса
 линию действия
линию действия
 параллельно линии хода ползуна. Точка
параллельно линии хода ползуна. Точка
 пересечения этих линий определяет
величины ускорений.
пересечения этих линий определяет
величины ускорений.
 =
= м/с2.
=
= м/с2.
Сравниваем полученный результат с аналитическим.
аВ=
S′′* 2
= = м/с2.
2
= = м/с2.
Схема механизма (β=270⁰)

Рис.1
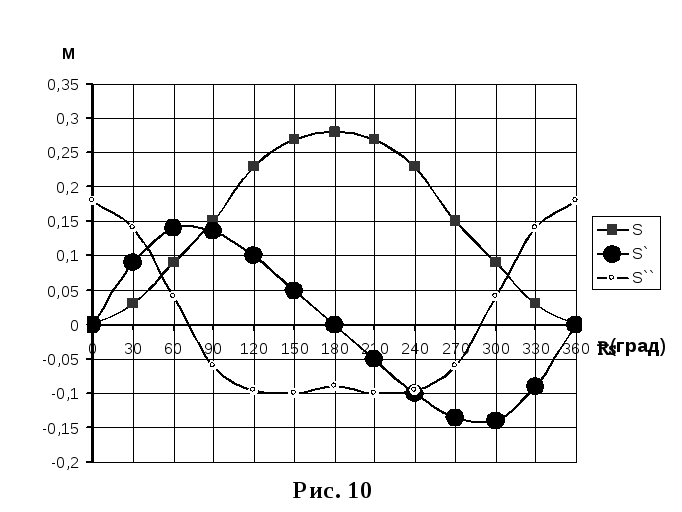
Рис.2
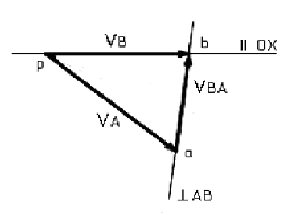
Рис.3 План скоростей
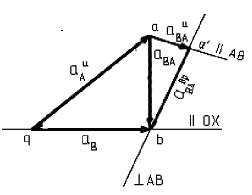
Рис.4 План ускорений
Табл.1
|
φ град. |
S м |
S’ м |
S’’ м |
γ град. |
|
0 |
|
|
|
|
|
30 |
|
|
|
|
|
60 |
|
|
|
|
|
90 |
|
|
|
|
|
120 |
|
|
|
|
|
150 |
|
|
|
|
|
180 |
|
|
|
|
|
210 |
|
|
|
|
|
240 |
|
|
|
|
|
270 |
|
|
|
|
|
300 |
|
|
|
|
|
330 |
|
|
|
|
|
360 |
|
|
|
|
Силовой расчёт механизма
При силовом расчете учитываются лишь наиболее значимые нагрузки, приложенные на ползунe:
-
Сила сопротивления P на ползуне, направленная против его скорости
 .
.
Её величину в каждом положении определяем по диаграмме в задании.
-
Сила тяжести ползуна
 =
= н.
=
= н.
Силы тяжести кривошипа и шатуна не учитываем.
-
Силы трения в кинематических парах не учитываем.
-
Движущий момент М1 на кривошипе подлежит определению.
-
Используем метод кинетостатики. К движущемуся механизму применяем уравнения равновесия статики, но при этом вводим в рассмотрение инерционные нагрузки.
Сила
инерции ползуна
 .
.
Знак “-“ означает, что сила инерции направлена против ускорения ползуна.
Силы инерции кривошипа, шатуна, инерционный момент шатуна не учитываем.
Ф3=-m3*
S′′* 2
= = =
н.
2
= = =
н.
Находим динамическое усилие на ползуне от действия внешних сил и сил инерции.
Qдин=(Р+G3*Cosβ-m3*S''*ω2)
Здесь β –угол между положительным направлением оси х и вектором силы тяжести.
Qдин = = н.
Если в рассматриваемом положении механизма усилие Р направлено против оси X, то подставляем его величину со знаком “–”.
Реакция со стороны
направляющих на ползун

R43= = н.
Так как внешние
силы и инерционные нагрузки, приложенные
к шатуну и кривошипу, не учитываются
 .
.
В проекциях на оси X,Y системы координат

 .
.


 =
н.
=
н.

 =
= н.
=
= н.

Уравновешивающий момент на валу кривошипа

 .
.
М1= = Нм.
Знак “+” в
результатах означает, что
 —
движущий момент, знак “–” - момент
сопротивления.
—
движущий момент, знак “–” - момент
сопротивления.
Результаты расчётов представлены в табл.2 и на рис.5,6,7.
В положении
механизма
 строим проверочный план сил для ползуна
(рис. 8). Должно выполняться условие
равновесия сил:
строим проверочный план сил для ползуна
(рис. 8). Должно выполняться условие
равновесия сил:
.

Табл.2
|
φ град. |
Рсопр. Н |
QДИН. Н |
R43 Н |
R41x Н |
R41y Н |
М1 Нм |
|
0 |
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
180 |
|
|
|
|
|
|
|
210 |
|
|
|
|
|
|
|
240 |
|
|
|
|
|
|
|
270 |
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
330 |
|
|
|
|
|
|
|
360 |
|
|
|
|
|
|
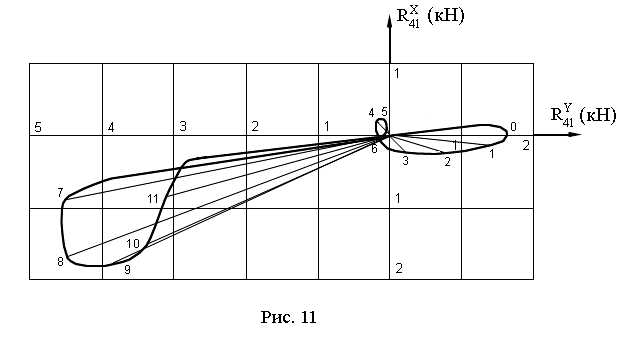
Рис.5
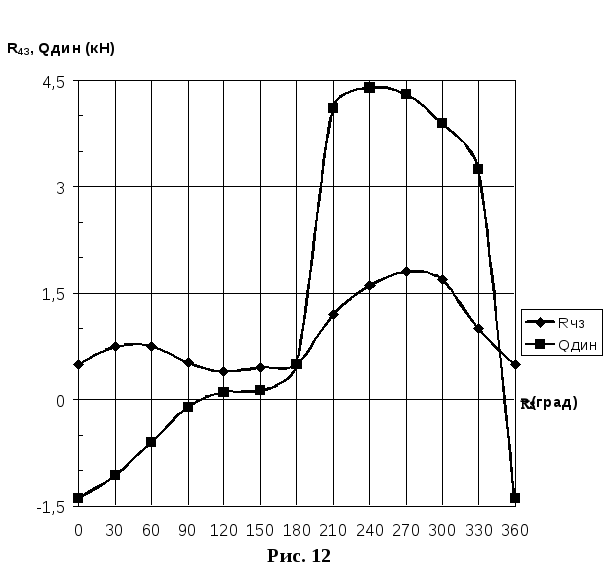
Рис.6
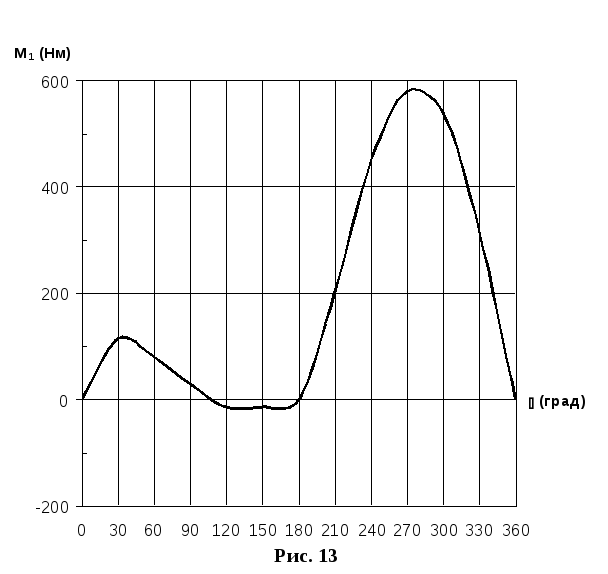
Рис.7
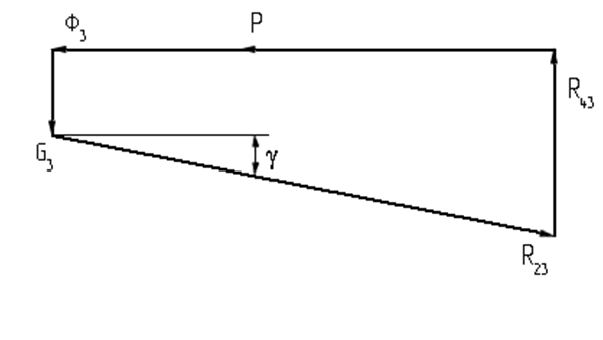
Рис.8