

Конспект лекций по
основам телемеханики
2012
УДК 621.398 ББК 32.968 Т 46
Тихонов Ю.Б.
Т 46 Конспект лекций по основам телемеханики. – Омск: СибАДИ, 2012. – 63 с.
Рассматриваются общие вопросы систем телемеханики, основные понятия, передача сообщений, элементы и узлы, основные принципы построения.
Настоящее издание предназначено для студентов направления 220700 «Автоматизация технологических процессов и производств» и специальности 220301 «Автоматизация технологических процессов и производств», всех форм обучения.
Табл. 6. Ил. 31. Библиогр.: 5 назв.
2
СОДЕРЖАНИЕ |
|
Раздел 1. Основные понятия в телемеханике………………………………………… |
4 |
Тема 1.1. Этапы управления производственными процессами………....................... |
4 |
Тема 1.2. Классификация систем телемеханики………………………....................... |
7 |
Раздел 2. Передача телемеханической информации………………………………… |
9 |
Тема 2.1. Сообщение и информация………………………………………………….. |
9 |
Тема 2.2. Квантование…………………………………………………………………. |
14 |
Тема 2.3. Кодирование………………………………………………………………… |
24 |
Тема 2.4. Методы модуляции…………………………………………………………. |
26 |
Тема 2.5. Достоверность передачи информации………………………...................... |
29 |
Тема 2.6. Организация каналов связи для передачи информации………………….. |
31 |
Раздел 3. Состав телемеханических устройств………………………………………. |
35 |
Тема 3.1. Элементы, используемые в телемеханике………………………………… |
35 |
Тема 3.2. Датчики автоматических систем……………………………....................... |
39 |
Тема 3.3. Сельсины………………………………………………………...................... |
44 |
Тема 3.4. Дешифраторы, шифраторы и счетчики……………………………………. |
46 |
Тема 3.5. Регистры, распределители и коммутаторы…………………....................... |
54 |
Раздел 4. Основные принципы телемеханики…………………………....................... |
56 |
Тема 4.1. Передача и прием телемеханических сигналов…………………………… |
56 |
Тема 4.2. Телеуправление и телесигнализация………………………………………. |
58 |
Тема 4.3. Телеизмерение………………………………………………………………. |
59 |
Тема 4.4. Представление информации в системах телемеханики……...................... |
60 |
Библиографический список…………………………………………………………… |
63 |
3
1.ОСНОВНЫЕ ПОНЯТИЯ В ТЕЛЕМЕХАНИКЕ
1.1.Этапы управления производственными процессами
Телемеханика – область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
•удалённость объектов контроля и управления;
•необходимость высокой точности передачи измеряемых вели-
чин;
•недопустимость большого запаздывания сигналов;
•высокая надёжность передачи команд управления;
•высокая степень автоматизации процессов сбора информации.
Назначение
Телемеханизация применяется тогда, когда необходимо объединить
разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж. -д. узлом), либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой).
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях.
Особое значение телемеханика приобретает в связи с созданием автоматизированных систем управления (АСУ). Обработка данных, полученных по каналам телемеханики, на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и упростить управление. Поэтому в настоящее время вместо понятия "телемеханика" всё чаще и чаще используется сокращение АСУТП – автоматизированная система управления технологическим процессом. Современная система телемеханики также немыслима без компьютера, поэтому можно сказать, что телемеханика и АСУТП – близнецы-братья. Разница между этими понятиями улавливается лишь по времени появления и по традиции использования. Например, в энергетике предпочитают использовать слово телемеханика, на промышленных предприятиях – АСУТП.
В англоязычных источниках аналогом понятия "телемеханика" явля-
ется сокращение SCADA – Supervisory Control And Data Acquisition – дис-
петчерское управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
4
Области применения
Предприятия химической, атомной, металлургической, горнодобывающей промышленности, электрические станции и подстанции, насосные и компрессорные станции (на нефте- и газопроводах, в системах ирригации, тепло- и водоснабжения), ж.-д. узлы и аэропорты, усилительные и ретрансляционные установки на линиях связи, системы охранной сигнализации и т. д.
История
Термин "телемеханика" был предложен в 1905 году французским учёным Э. Бранли. Первоначально с понятием телемеханики связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, в 1-й мировой войне.
Практическое применение телемеханики в мирных целях началось в 20-х годах 20 века, главным образом на ж.-д. транспорте: телеуправление ж.-д. сигнализацией и стрелками было впервые осуществлено в 1927 на железной дороге в Огайо (США). В 1933 в Московской энергосистеме (Мосэнерго) введено в эксплуатацию первое устройство телесигнализации. Серийное заводское производство устройств телемеханики в СССР впервые было организовано в 1950 на заводе "Электропульт".
Развитие телемеханики шло параллельно с развитием электроники и средств связи. Первые системы строили на релейных схемах. В 50-х годах на смену реле пришли более надежные полупроводниковые элементы. В конце 60-х годов началось использование интегральных схем.
Тенденции развития
Всовременной системе телемеханики большое внимание уделяется программному обеспечению системы и интеграции с действующими системами и программными комплексами. Стандартом стало графическое представление схем контролируемого процесса (мнемосхем) с "живым" отображением текущего состояния, управление объектом с кадров мнемосхем.
Впрограммном обеспечении наблюдается тенденция к стандартизации программных интерфейсов систем сбора данных и обрабатывающих программ (технология OPC), возрастает потребность экспорта собранных данных в специализированные программы (расчета режимов, планирования, аналитические, АРМ специалистов). В условиях усложнения систем повышается роль средств диагностики и отладки.
Стехнической стороны в системах всё чаще используются современные скоростные каналы связи (оптоволокно, Ethernet) и беспроводные технологии (например, транкинговая и сотовая связь). Вместе с тем сохраняется потребность стыковки с морально (а иногда и физически) устаревшими "унаследованными" системами, с сохранением их протоколов связи.
5
На контролируемых объектах всё чаще возникает необходимость стыковки с локальными технологическими системами.
Наряду с усложнением самих систем и их программного обеспечения наблюдается изменение требований к реализуемым функциям. К традиционным функциям телемеханики (телесигнализация, телеизмерение, телеуправление) добавляются функции энергоучета, транспорта данных с локальных автоматических приборов. К обычным функциям контроля за изменением состояния и превышения предельных значений добавляются возможности текущих расчетов и логического анализа (например, балансные расчеты
Автоматизация производства – этап развития машинного производства, характеризующийся передачей функций управления производственными процессами от человека устройствам и системам автоматического управления. В отличие от предшествующего ей этапа механизации производства как средства замены ручного (физического) труда машинным, автоматизация производства имеет целью освобождение человека от всех видов деятельности, поддающейся алгоритмизации.
Автоматизация производства развивалась и развивается непрерывно от частичной автоматизации, т. е. автоматического выполнения отдельных производственных операций, к комплексной автоматизации целых технологических процессов – к полной автоматизации с переходом к цехамавтоматам и заводам-автоматам, обеспечивающим наивысшую техникоэкономическую эффективность. Автоматизация производства связана с ростом масштабов производства, увеличением быстродействия технологических процессов, интенсификацией производства. Высокое быстродействие, отсутствие утомляемости и невосприимчивость к посторонним, не имеющим отношения к управляемому процессу воздействиям позволяют управляющим системам выполнять свои функции несравненно эффективнее, чем это может делать человек.
Наибольший эффект автоматизация дает в тех случаях, когда технологическое оборудование уже на стадии проектирования рассчитывается не на ручное, а на автоматическое управление. Точно так же наибольший эффект от использования систем автоматического управления достигается при комплексном охвате автоматизацией всех машин и технологических агрегатов цеха или участка. Комплексная автоматизация значительно уменьшает влияние субъективных факторов человека (мастерство, утомляемость, быстрота реакции и т. п.) на технологический процесс и позволяет достигнуть более ритмичной и высокопроизводительной работы. В силу органической связи отдельных участков производства между собой согласование их работы должно быть централизованным и сосредоточенным в руках одного человека. Это связано с тем, что для выбора режимов работы отдельных агрегатов необходимо иметь полную картину обо всем
6
производстве в целом. Поэтому среди систем управления видное место занимают устройства, обеспечивающие организацию связи человека с машинами. Эти устройства должны облегчить человеку управление производственными процессами, разгрузить его нервную систему, освободить мозг от напряженной и рутинной механической работы. Полное исключение субъективных особенностей человека на показатели процесса требует автоматизации и оперативного управления. Создание систем автоматического оперативного управления является завершающим звеном полной автоматизация производства (создания цехов и предприятий-автоматов). В настоящее время для оперативного управления производством во все возрастающих масштабах применяются электронные вычислительные машины.
1.2. Классификация систем телемеханики
Системы телемеханики получили значительное применение в производственных отраслях, где остро стоит вопрос организации централизованного управления территориально удалёнными системами. Это железнодорожный транспорт, крупные промышленные предприятия, энергетическая отрасль и т. д.
Особо важную роль играют модули телеуправления, модули телесигнализации и так называемые контроллеры присоединения именно в энергетической отрасли, которую можно смело назвать уникальной по сравнению со всеми другими производственными отраслями. Ведь нигде, ни в одном другом производстве нет настолько чёткой и согласованной деятельности между поставщиками и потребителями готовой продукции.
Так как продукцией является электроэнергия, то все крупные производители и потребители должны быть объединены в единую систему. Если взять Россию, то в ЕЭС входят сотни электростанций, которые расположены на территории 8 часовых поясов. При этом их общая мощность превышает 170 ГВт. Для решения задач управления и координации энергетических систем необходимы современная автоматика и телемеханика.
Рассмотрим, какие системы телемеханики применяются в энергетике, и их классификацию. В первую очередь разберёмся, чем автоматика и телемеханика различаются между собой.
Главной особенностью систем телемеханики является наличие устройств, обеспечивающих передачу информации на большие расстояния. При этом необходимо, чтобы модули телеуправления получали как можно менее искажённую информацию. В условиях значительной территориальной разобщённости элементов энергосистем и наличия значительного количества помех это создаёт наибольшую проблему для работы системы телемеханики.
7
По заложенным в них функциям и типу передаваемых данных системы телемеханики, применяемые в энергетической отрасли, классифицируются на:
-модули телеуправления, управляющие отдельными единицами оборудования или целыми комплексами;
-модули телесигнализации, на которые возложена функция дистанционного контроля состояния и положения объектов;
-системы телеизмерения, проверяющие показатели различных вели-
чин;
-модули передачи данных, предназначенные для передачи на расстояние информации об управляемых объектах в цифровой или другой форме.
Если говорить в общем, то все системы телемеханики представляют собой системы передачи данных. В них содержится совокупность технических средств (модули телесигнализации, управления, модули телеизмерения, модули дискретной сигнализации и т. д.), которые должны обеспечить передачу информации от источника к рабочему органу и выполнение всех возложенных на неё функций.
Основными критериями при выборе системы телемеханики являются обеспечение максимальной функциональности, высокая надёжность в эксплуатации как самой системы, так и программного обеспечения, а также поддержка основных протоколов обмена данных. Важным показателем, которым должны обладать автоматика и телемеханика, является доступность совокупной стоимости владения, куда входит стоимость самой системы и её эксплуатации.
Отличительной особенностью систем телемеханики по сравнению с системами автоматики является наличие в них устройств для передачиинформации на значительные расстояния. Для правильного функционирования автоматических систем необходимо, чтобы информация в процессе передачи претерпевала наименьшие искажения. В условиях же территориальной разобщенности частей системы и действия помех это затруднительно.
Для решения задачи передачи информации сформировалась особая область науки и техники – телемеханика, которая охватывает теорию и технические средства преобразования и передачи на расстояние информации для управления техническими системами.
Телемеханические системы получили большое распространение при централизованном управлении территориально развитыми системами в энергетике, на железнодорожном транспорте, газо- и нефтепроводах и т. д. Только с использованием средств телемеханики возможно исследование космоса, а также создание автоматизированных систем управления производственными процессами на транспорте и в промышленности.
8
По выполняемым функциям и характеру передаваемой информации телемеханические системы подразделяют на системы:
телеуправления, управляющие оборудованием или целыми производственными комплексами;
телесигнализации, контролирующие на расстоянии состояние и положение объектов;
телеизмерения, контролирующие на расстоянии параметры различных величин (ток, напряжение, давление, скорость);
передачи данных, передающие на расстояние цифровую и другую информацию о работе производственных объектов для использования ее в вычислительных или управляющих машинах;
комбинированные, объединяющие некоторые из перечисленных выше систем.
Все системы телемеханики являются системами передачи информации. Эти системы содержат совокупность технических средств передающих информацию от источника к исполнительному устройству. В наиболее общем виде система для передачи информации состоит из источника сообщения, кодирующего устройства, которое формирует из сообщения сигнал, передатчика-модулятора, преобразующего сигнал в вид, удобный для передачи по линии связи (физической среды, по которой передаются сигналы), приемника-демодулятора, преобразующего сигнал в первоначальный вид, декодирующего устройства, формирующего из сигнала сообщение. По принятому сообщению должны быть сформированы сигналы реализации. Эту задачу решает отдельное устройство — формирователь сигнала реализации, воздействующий на исполнительное устройство. Цель системы — передача сообщения от источника к получателю, т. е. исполнительному устройству. Она считается выполненной, если сообщение Б, принятое получателем, полностью соответствует переданному сообщению А.
2.ПЕРЕДАЧА ТЕЛЕМЕХАНИЧЕСКОЙ ИНФОРМАЦИИ
2.1.Сообщение и информация
При управлении производственным процессом всегда возникает сообщения о ходе производственного процесса, которые необходимо передавать от одного звена устройства управления к другому. Эти сообщения порождаются различными событиями, например: изменением состава подаваемого сырья, повышением температуры окружающей среды, изменением нагрузки на подстанциях электросети. В полученном сообщении может оказаться больше сведений, чем это необходимо оператору или ЭВМ для
9

принятия решения. Некоторые из них были известны. А какая-то часть сообщения содержит новизну.
Под сообщением понимается все то, что передается о ходе производственного процесса (или, более широко, событии).
Под информацией понимается лишь та часть сообщения, которая имеет новизну и ранее не была известна данному получателю (оператору или машине).
Примеры:
1)сведения о ходе плавки в мартеновской печи из лаборатории - информация;
2)письмо - сообщение, телеграмма - информация.
Вавтоматических устройствах сообщения передаются из одного звена устройства к другому в ходе сигналов. Для передачи сигналов используются такие физические процессы, которые обладают свойством перемещения в пространстве. К ним относятся звуковые и э/м колебания, движения струй воздуха и т.д. Это так называемые переносчики информации. Переносчик должен обладать свойством изменять свою форму или параметры под воздействием сообщения. Сам по себе переносчик не является сигналом.
Сигнал – это переносчик с нанесенным на нем сообщением или информацией. Сигналы должны образовываться по определенному закону. Сигнал подается в линию и поступает к получателю (абоненту), где он снова преобразуется в сообщение или информацию. Такова общая схема передачи сообщений применительно к теории связи.
Различают идеальный (рис. 1,а) и реальный (рис. 1,б) случай передачи телемеханической информации.
Рис. 1 Идеальный (а) и реальный (б) случаи передачи телемеханической информации
10
Из-за помех необходимо передавать избыточную информацию (например, повторяем сообщение несколько раз), чтобы информация была достоверной.
Информация
Циркуляция потоков информации лежит в основе управления процессами. Для того чтобы с наибольшей эффективностью передать сообщение, нужно, во-первых, наилучшим образом использовать возможности сигнала и, во-вторых, обеспечить максимальную пропускную способность канала связи, т.е. передать наибольшее количество информации без исключений в единицу времени.
Посмотрим, как связана информация с процессом управления.
В основе управления лежит выбор. Если процесс происходит по заранее заданному закону, который нельзя менять, то и управлять нечем. Например, если поезд от одной станции к другой идет к заданной скоростью по прямому пути без всяких ответвлений, то никаких команд (сигналов) ему посылать не надо. Если на его пути есть стрелка, переключив которую можно направить поезд на один путь или на другой т.е. выбирать направление, это означит есть и управление.
Сигнал может быть простым или сложным. Элементарный сигнал может принимать два или несколько значений, например, импульс постоянного тока различной полярности или амплитуды, или импульс с частотой заполнения f1 или f2 или f3 и т.д.
Рис. 2. Передача двух сообщений одним сигналом (а), четырех сообщений двумя сигналами (б), восьми сообщений тремя сигналами (в)
1)Для выбора одного из двух путей (рис. 2,а) нужен один элементарный сигнал, который обеспечит передачу одного из двух сообщений:
для переключения стрелки а на путь 1 нужно послать частоту f1, а для переключения этой же стрелки на путь 2 нужно послать f2.
2)Для выбора одного из четырех путей (рис. 2,б) нужны два элемен-
тарных сигнала, каждый из которых может принимать те же значения f1 и f2. Переключение любой из стрелок осуществляется налево частотой f1, на-
11
право – частотой f2. Этими двумя элементами можно передать четыре сообщения (т.е. выбрать одно из четырех положений, или поочередно каждое
из них). Для пути 3 f2, f1.
3) Для выбора одного из восьми путей (рис. 2,в) нужны три элементарных сигнала. Для выбора первого пути f1, f1, f1, для третьего пути f1, f3, f1. Таким образом, тремя элементами можно передать уже восемь сигналов.
Из примеров следует, что число направлений (вариантов, состояний системы, сообщений) растет быстрее числа элементарных сигналов, которыми эти направления выбираются. Так для передачи двух сообщений (сигналов) нужен один элемент сигнал; для четырех сообщений нужно два элемента сигнала; для восьми сообщений нужно три элемента сигнала.
В общем случае, если n – число элементарных сигналов, а N – число сообщений (сигналов), то
N = 2 |
(1) |
Количество элементов, необходимое для передачи заданного числа |
|
сообщений |
|
n = log2M, |
(2), |
где М - число возможных состояний системы. |
|
Если необходимо сделать выбор из двух возможных вариантов, например, направить поезд на первый или второй путь, поехать направо или налево и т.п., то это значит, что перед нами имеется какая-то неопределенность. Когда выбор сделан, то эта неопределенность снимается, и мы получаем информацию. Информация увеличивается, если неопределенность больше, т.е. если перед нами стоит, например, задача осуществить выбор несколько раз, например трехкратный выбор направления поезда на один из восьми путей. Если из этого трехкратного выбора осуществлен только один выбор, то получим недостаточное количество информации о сообщении объекта, т.е. у нас о нем не будет полной определенности.
Таким образом, количество информации о каком либо событии следует оценивать степенью определенности наших знаний об этом событии (объекте). За единицу количества информации принимают такое ее количество, которое получается при выборе из двух равновероятных возможностей или содержится в ответе «да» или «нет» на простой вопрос и т.п. Поэтому в уравнении (2) основание логарифма выбрано равным двум.
В качестве устройств, запоминающих информацию, применяются реле, триггеры, магнитные элементы с прямоугольной петлей гистерезиса и другие устройства, обладающие двумя устойчивыми состояниями. Одно реле, один триггер или другое подобное устройство способно запомнить одну единицу количества информации. Такая единица называется двоичной единицей или битом (от английского bit - binary digit-двоичная цифра). Для направления поезда на одно из двух равновероятных направлений была передана информация в 1 бит. Двоичная единица удобна и тем, что со-
12
ответствует двоичной системе счисления, используемой в вычислительной технике. Восемь бит образуют один байт.
Устройство, позволяющее записать количество информации, равное единице, или одному биту, называется двоичной ячейкой. Если система для запоминания информации обладает, например, 32 состояниями, то ее информационная емкость равна c=log232=5 двоичным единицам, т.е. равна по емкости пяти двоичным ячейкам. Проще выполнить пять двоичных ячеек, каждая из которых обладает двумя состояниями, чем одну с 32 состояниями.
Переносчики информации
В телемеханике в качестве переносчиков информации используются электромагнитные колебания в виде переменного тока или импульсов:
а) переменный ток; аналитическое выражение переменного синусоидального тока
I = Iмакс sin(ωt+ψ), |
(3) |
где I - мгновенное значение тока, Iмакс - максимальное значение или амплитуда, ω = 2·π·f - угловая частота, f – линейная частота, ψ - фазовый угол или начальная фаза.
Переменный ток характеризуется амплитудой, частотой и фазой. Изменение этих параметров переменного тока при наложении на него информации осуществляется при помощи модуляции;
б) импульс, спектр, полоса частот; импульсы постоянного тока или напряжения называются видеоимпульсами (рис. 3,а). Радиоимпульсами (рис. 3,б) называются импульсы переменного тока, которые образуются при заполнении импульсов постоянного тока ВЧ-колебаниями.
(а)
(б)
Рис. 3. Временные диаграммы видеоимпульсов (а) и радиоимпульсов (б) как переносчиков информации
Длительность τ отсчитывается на уровне 0,5 А, т. е. половине ампли-
туды.
13
Различают период следования импульсов Т и скважность Q: |
|
Q=T/τ. |
(4) |
2.2. Квантование
Квантование по времени
Если замена непрерывной функции ее отдельными значениями производится в определенные моменты времени, то этот процесс называется квантованием по времени, или дискретизацией. На рис. 4,а показано, что горизонтальная ось времени делится на интервалы, отстоящие друг от друга на один и тот же интервал квантования ∆t.
Далее проводят вертикальные линии до пересечения с квантуемой функцией в точках 1, 2, 3, ..., 9 и определяют значения функции, начиная с λ0(t). Это значит, что в интервале Т непрерывная функция λ(t) будет передаваться не бесконечным рядом значений, а в данном случае всего лишь десятью значениями. Нахождением точек, определяющих значение непрерывной функции в дискретные моменты времени, как и в квантовании по уровню, собственно процесс квантования по времени и заканчивается.
Если нужно восстановить квантованную функцию, осуществляют один из видов интерполяции, например, ступенчатую. При этом проводят из точек 0, 1, 2, ..., 9 горизонтальные линии до пересечения их с вертикальными линиями, т.е. линии 0-1', 1-2' и т.д. Далее точки 1'-1, 2'-2, 3'-3 и т.д. соединяют и получают ломаную квантованную функцию λ’(t).
Очевидно, что чем больше дискретных значений передается за время Т, т.е. чем меньше шаг квантования ∆t, тем с большей точностью будет восстановлена на приеме функция λ’(t). Однако излишне малая величина ∆t увеличивает массив измеренных значений и для их запоминания требуется больший объем памяти. В то же время при чрезмерно большом шаге квантования воспроизводимая функция будет не очень точной и сильно искаженной.
Шаг квантования можно определить из теоремы Котельникова, смысл которой заключается в следующем: любая непрерывная функция, спектр частот которой ограничен частотой Fmax, может быть полностью восстановлена по ее дискретным значением, взятым через интервалы времени
∆t ≤ |
1 |
= Tmax . |
(5) |
|
2F |
||||
|
2 |
|
||
|
max |
|
|
Однако имеется ряд ограничений для практического применения этой теоремы. Так, все сообщения, передаваемые в телемеханике, представляют собой обычно видео или радиоимпульсы длительностью τ, у которых спектр бесконечен. Поэтому представляет значительные трудности выбор величины Fmax в (5) для функций, ограниченных во времени. Так,
14

например, если предавать синусоидальное напряжение с частотой 50 Гц бесконечно долго во времени, то согласно (5) для восстановления его формы на приеме достаточно передать за период лишь два импульса, соответствующих амплитудным значениям: один – положительной полуволне, другой – отрицательной. Если же предавать синусоидальное напряжение в конечном отрезке времени, то для восстановления формы этого радиоимпульса необходимо уже не два, а значительно больше импульсов, хотя точно указать их число невозможно из-за того, что спектр частот радиоимпульсов бесконечен.
Рис. 4. Квантование сообщения по времени: а) - метод квантования
ивосстановление функции ступенчатой интерполяцией; б) - погрешности квантования; в) – восстановление функции линейной интерполяцией
15

Практически теорему Котельникова можно принять со следующей поправкой:
∆t = |
|
1 |
= |
Tmax |
, |
(6) |
η2F |
|
|||||
|
|
2η |
|
|||
|
|
max |
|
|
|
|
где η – коэффициент, зависящий от точности воспроизведения функции и
способа интерполяции: при линейной ηл=0, 75/ и при ступенчатой ηст=(3-5) ηл (δ – относительная погрешность в %)
и при ступенчатой ηст=(3-5) ηл (δ – относительная погрешность в %)
Существует и другой подход определения шага квантования, исходящий из задаваемой величины погрешности. Для примера на рис. 4,б начерчены в виде фигур, близких к треугольникам, величины абсолютных погрешностей, возникающих при квантовании; эти фигуры подобны токовым на рис. 4,а. На рис. 4,б показано, что заданная величина абсолютной погрешности ∆3 на одном участке нарастания функции λ(t) достигается за период ∆t, на другом за ∆t2, а на некоторых она оказывается меньше заданной (например, на участке 1`-2`). Это зависит от скорости нарастания функции λ’=dλ/dt. Очевидно, следует выбрать такой шаг квантования, ко-
торый соответствует максимальной скорости нарастания функции λ&max .
Так, из рис. 4,а следует, что если бы на участке кривой 5-6 имелся всплеск функции (пунктир), то выбранный шаг квантования ∆t оказался бы излишне большим и этот всплеск не был бы восстановлен (следовало бы взять шаг ∆t’).
Из рис. 4,б видно, что
(7)
Если считать, что максимальная скорость нарастания сохраняется во всем диапазоне изменения сообщения от нуля до максимального значения,
то минимальное время изменения сообщения во всем диапазоне |
(8) |
T = & . |
|
λmax |
|
λmin
Величина абсолютной погрешности  показана на рис. 4,б. Здесь, как и в квантовании по уровню, при расчетах следует учитывать или +∆з, или –∆з, т.е. в среднем
показана на рис. 4,б. Здесь, как и в квантовании по уровню, при расчетах следует учитывать или +∆з, или –∆з, т.е. в среднем  /2. Это значит, что
/2. Это значит, что  =
=  100/2λmax. Подставляя отсюда значение
100/2λmax. Подставляя отсюда значение  в (7), а значение λ&max из (8), получаем
в (7), а значение λ&max из (8), получаем
∆t = |
2δT |
λmin . |
(9) |
|
100 |
||||
|
|
|
Формула выведена с учетом восстановления функции при помощи ступенчатой интерполяции.
Пример. Найти ∆t при квантовании синусоидального напряжения частоты F=50 Гц. Погрешности при восстановлении δ=1% . Согласно (5)
16

∆t = 1/2*50*10-3 =10 мм, т.е. если в идеальном случае каждую полуволну синусоиды можно передавать лишь одним значением [период
τ=1/(50*103)=20мм] ηл.и.=0,75/0,75/ =7,5, то для ступенчатой интерпо-
=7,5, то для ступенчатой интерпо-
ляции ηст=25 и ∆tст= 1/25*2*50*10-3=0,4 мсек. Такой же результат получается и из (9). Таким образом, при заданной точности восстановления, каждый полупериод синусоиды следует предавать одним значением, а именно 25 при ступенчатой интерполяции и 7,5 при линейной.
Восстановить квантованную по времени функцию на приемной стороне можно при помощи ступенчатой или линейной интерполяции или используя метод Котельникова. Чаще всего применяется ступенчатая интерполяция, и наиболее редко используется фильтрация по Котельникову. Ступенчатая интерполяция на рис. 4,а) выполняется с помощью запоминающих устройств, сохраняющих значения λ(ti) до появления следующего
значения λ(ti+1).
Погрешность от ступенчатой интерполяции изображена на рис. 4,б. Причем под погрешностью интерполяции понимается разность между мгновенными значениями восстановленного и исходного символов, взятых в одни и те же моменты времени. Максимальная погрешность возникает в точках 1', 2', ..., 9'. Погрешность равна нулю в точках 1, 2, 3, ..., 9. В общем случае задаются среднеквадратичные значения этой погрешности:
(10)
где n - число замеров.
При восстановлении квантованной функции по Котельникову нужно знать все дискретные точки, как предыдущие, так и последующие, или во всяком случае для практической реализации должно быть известно несколько точек до и после интервала, в котором происходит интерполяция. Знание последующих точек возможно, лишь в системах, допускающих запаздывание в передаче информации. Большинство телемеханических систем работает в реальном масштабе времени и не допускает запаздывания. В таких системах приходится использовать ступенчатую интерполяцию, так как для линейной интерполяции нужно знать наперед хотя бы одну точку, что опять требует запаздывания. Действительно, если, например, известно значение функции в момент t4 (рис. 4,а, т. 4), то при ступенчатой интерполяции нам заранее известно, что через ∆t значение функции будет тем же (т. 5`). Каким оно будет при линейной интерполяции через интервал ∆t, неизвестно: то ли значение возрастает (т. 5), то ли уменьшится (т.
52).
Иногда восстановление функции, квантованной по времени, с шагом, подсчитанным по теореме Котельникова, производится при помощи фильтра НЧ, который выделяет постоянную составляющую и низкочас-
17

тотные составляющие, соответствующие спектру передаваемой функции. Однако при этом возникают погрешности из-за того, что амплитудночастотная характеристика реального фильтра отличается от характеристики идеального фильтра. Восстановление при помощи фильтра имеет смысл, если спектр передаваемой функции достаточно сосредоточен в области нуля по оси частот. Зачастую квантование по времени используется для осуществления амплитудно-импульсной модуляции.
Квантование по уровню и времени
При квантовании по уровню передаваемые значения могут следовать друг за другом с переменным шагом ∆t. При квантовании по времени найденные значения непрерывной величины в дискретные моменты времени чередуются через строго определенные интервалы времени ∆t (шаг квантования), но имеют самую разнообразную амплитуду (уровень).
В некоторых случаях квантование осуществляется с заданными шагами квантования, как по времени, так и по уровню. На рис. 5 показано, как производится квантование по уровню и по времени функции λ(t). Сначала проводятся линии, параллельные оси λ с шагом ∆t, затем уровни с шагом q, параллельные оси времени. Квантование осуществляется путем замены через время ∆t значений функции λ(t) ближайшим дискретным уровнем. Проследим по рисунку, как находятся эти точки.
Рис. 5. Квантование по уровню и времени
В начальный момент ближайшим уровнем к значениям функции будет уровень 3, поэтому здесь ставится точка а. В момент t1 ближайшим уровнем явится уровень 2 (точка b). В момент t2 ближайший уровень - это снова уровень 2 (точка c). Далее следуют точки d, e, f и т.д. Таким образом, следует придерживаться правила: в данный момент времени заменяют
18

функцию ее ближайшим дискретным значением (на пересечениях вертикальных и горизонтальных линий).
При восстановлении из выбранных точек (а, b, c и т.д.) следует сначала провести горизонтальные линии вправо на шаг квантования, т.е. до пересечения их с вертикальными линиями (при этом запоминается предыдущее значение функции). Далее горизонтальные отрезки соединяются вертикальными. Иными словами, функция восстанавливается при помощи ступенчатой интерполяции.
Погрешности, возникающие от одновременного квантования по уровню и времени, сначала находится поочередно для каждого из видов квантования. Суммарная ошибка определяется как
(11)
В большинстве случаев узловые точки (а, b, c…) ломанной кривой могут располагаться не на непрерывной кривой, как при квантовании по времени. Такое отставание и определение квантованной функции увеличивает погрешность квантования.
Квантование по уровню
Квантование по уровню – это процесс замены непрерывной функции ее отдельными значениями, отстоящими друг от друга на конечный интервал (уровень). При квантовании значение функции в произвольный момент времени заменяется ее ближайшим значением, называемым уровнем квантования. Интервал между двумя дискретными значениями уровней назы-
вается шагом квантования (q).
Рис. 6. Квантование сигнала по уровню: а) – с постоянным шагом квантования; б) – погрешности квантования; в) – квантование с переменным шагом
19

По оси ординат (рис. 6,б) откладывается величина заранее выбранного шага квантования q и проводятся линии, параллельные оси времени, обозначающие уровни квантования. Переход с одного уровня на другой происходит, когда значение функции находится в середине интервала квантования, так как в этот момент абсолютная погрешность квантования ∆к.у. оказывается наибольшей (рис. 6,а). Действительно, если значение функции находится в середине между двумя уровнями (точки а, b, c…), то возникает неопределенность, так как функция равноудалена от обоих уровней. Так, например, если значение функции в точке b возникает на бесконечно малую величину, то это новое значение целесообразно отнести к уровню 3. Наоборот, значение функции, несколько меньше значения в точке с, будет заменено уровнем 2. Исходя из сказанного, процесс квантования осуществляется следующим образом: интервал квантования делится пополам, и проводятся пунктирные горизонтальные линии до их пересечения с квантуемой функцией. Точки пересечения обозначаются буквами (а, b, c, d и т.д.), в них значение функции передается наименее точно, возникает ошибка квантования ∆к.у., равная разности между значением функции λ(t) и ближайшим уровнем. Так как наименее точно функция передается в точке, находящейся между двумя уровнями квантования и отстоящей от них на половину интервала квантования q/2, то максимальная ошибка квантования по уровню определится как
(12)
Здесь +q/2 - максимальная положительная ошибка квантования, например, от точки в до уровня 2, а -q/2 – максимальная отрицательная ошибка квантования, например, от точки с до уровня 3. Погрешность квантования представлены на рис. 6,б, на котором на оси времени отложены отрезки уровней квантования, пересекаемые функцией.
Так, функция между точками k и a пересекает уровень 2. Этот уровень отложен на оси t (рис. 6,а), и проведен отрезок функции k-a. На участке а-b функция хотя и не пересекает ни один из уровней, но так как она проходит ближе к уровню 1, то отрезок этого уровня откладывается на оси времени. В этом диапазоне от точки а до точки b погрешность отсчитывается от уровня 1 и будет только положительная. На других участках имеет место погрешность и положительная, и отрицательная.
Таким образом, в результате квантования функции λ(t), произведенного по определенному правилу, был отобран ряд дискретных значений этой функции в точках а, b, c, d и т.д. Отбором точек и заканчивается собственно процесс квантования. Если же необходимо представить себе полностью форму той функции, которая заменила функцию λ(t), поступают следующим образом. Через точки а, b, c, d и т. д. проводят вертикальные отрезки (до их пересечения с уровнями), которые затем соединяются гори-
20
зонтальными отрезками, образуя ступенчатую квантованную функцию λ’(t). Из рис. 6,а следует, что квантованная ступенчатая функция λ’(t) как бы обходит с двух сторон (выше и ниже) непрерывную функцию λ(t). Это позволяет рассматривать квантование как результат наложения на функцию λ(t) помехи ∆(t), которую называют шумом или помехой квантования.
Как следует из рис. 6,а, число уровней квантования N на единицу больше числа интервала N–1.
Если сообщение λ(t) ограничено диапазоном от λmin до λmax, то
 . (13)
. (13)
При λmin=0 имеем
Что касается точности преобразования (квантования), то обычно она
задается в виде значения приведенной относительной погрешности  (в
(в
%), которая по определению равна  . При описанном выше методе квантования погрешность (рис. 6,б) не может превышать q/2, т.е. при подсчете δк.у. нужно учитывать (12). Таким образом, считая, что λmin=0 (это достигается соответствующим расположением осей координат) получим
. При описанном выше методе квантования погрешность (рис. 6,б) не может превышать q/2, т.е. при подсчете δк.у. нужно учитывать (12). Таким образом, считая, что λmin=0 (это достигается соответствующим расположением осей координат) получим
(14)
и шаг квантования при заданной погрешности квантования равен
(15)
Пример. Предположим, необходимо провести квантование непре-
рывной функции, от нуля до 100 В, с точностью  . Согласно (15) q=2В. Из (13) определяем, что необходим 51 уровень квантования.
. Согласно (15) q=2В. Из (13) определяем, что необходим 51 уровень квантования.
Замена действительного значения функции ее ближайшим значением создает погрешность квантования, которая может принять любые величины от -q/2 до +q/2 (рис. 6,б). При достаточно большом числе уровней квантования N распределение погрешности квантования в пределах от –q/2 до +q/2 будет равномерное независимо от закона распределения самой функции λ(t). Среднеквадратичное значение погрешности квантования по уровню
(16)
21

т. е. в  раз меньше максимальной ошибки.
раз меньше максимальной ошибки.
Неравномерное квантование по уровню
Некоторые функции, подлежащие квантованию, изменяются так, что
их целесообразно квантовать с переменным шагом квантования 

 Так, на рис. 6,в показана нелинейная зависимость тока I от напряжения U. Если необходимо при измерении получить равномерную шкалу напряжений, то отсчет по току надо вести с переменным шагом q, уменьшая его с ростом амплитуды. Могут быть и другие варианты изменения шага квантования. Так, например, если необходимо получить более точные значения в какой-либо части квантуемой функции, то в этом диапазоне шаг квантования следует уменьшить.
Так, на рис. 6,в показана нелинейная зависимость тока I от напряжения U. Если необходимо при измерении получить равномерную шкалу напряжений, то отсчет по току надо вести с переменным шагом q, уменьшая его с ростом амплитуды. Могут быть и другие варианты изменения шага квантования. Так, например, если необходимо получить более точные значения в какой-либо части квантуемой функции, то в этом диапазоне шаг квантования следует уменьшить.
Восстановление функции, квантованной по уровню
Квантование по уровню осуществляется для последующего кодирования, т.е. каждый уровень квантованной функции передается кодом.
На приемной стороне кодовая комбинация, поступая на дешифратор, преобразуется в ток или напряжение, которые используются по назначению (отклоняют стрелку прибора, изменяют показания цифровых индикаторов и т.д.). Принятая квантованная функция в своем первоначальном (непрерывном) виде на приеме обычно не восстанавливается, хотя это можно сделать путем линейной или более сложной интерполяции. Простейшая ступенчатая интерполяция функции λ(t) была осуществлена, когда мы горизонтальными отрезками соединяли вертикальные отрезки, образуя функцию λ’(t) (рис. 7,а).
Дифференциальное квантование
Этот вид квантования применяется при осуществлении дельтамодуляции. Также расчерчивается сетка из вертикальных и горизонтальных линий с точками ∆t и q соответственно.
Переход с уровня на уровень осуществляется через интервал  t по следующему правилу: если значение λ(t) больше, чем дискретное значение λ’(t) в предыдущем интервале, то происходит переход на следующий, более высокий, дискретный уровень. Если текущее значение λ(t) меньше, чем дискретное значение в предыдущем такте, происходит переход на один более низкий дискретный уровень. (Условие перехода на более высокий уровень λ(t)>λ`(t), на более низкий уровень λ(t)<λ`(t)).
t по следующему правилу: если значение λ(t) больше, чем дискретное значение λ’(t) в предыдущем интервале, то происходит переход на следующий, более высокий, дискретный уровень. Если текущее значение λ(t) меньше, чем дискретное значение в предыдущем такте, происходит переход на один более низкий дискретный уровень. (Условие перехода на более высокий уровень λ(t)>λ`(t), на более низкий уровень λ(t)<λ`(t)).
Из рис. 7,а следует, что в точке b значение функции λ(t) меньше, чем значение функции λ’(t) в точке а', поэтому значение дискретной функции переходит в точку b'. В точке c значение λ(t) снова меньше, чем значение функции λ’(t) в точке b', поэтому квантованная функция переходит на уровень ниже в точку c'. В точке d значение функции λ(t) уже выше, чем зна-
чение функции λ’(t) в точке c', и функция  повышает свое значение до
повышает свое значение до
22

точки d'. В т. e λ(t)>λ`(t) в т.d и эта функция λ’(t) делает скачек в т.e. Так как в т.f λ(t) получила прирост то и λ’(t) сделала скачек в т. f.
Рис. 7. Дифференциальное квантование: а) – квантование и восстановление функции; б) – импульсы ∆-модуляции
На рис. 7,б показано, что отрицательные импульсы проставляются при отрицательной ошибке, а положительные – при положительной ошибке. Этот ряд импульсов соответствует производной dλ’(t)/dt и представляет собой результат дифференциального квантования функции λ(t) с приращениями ∆.
Характерно, что при быстрых изменениях функции λ(t) возможно отставание ступенчатой функции от непрерывной из-за того, что по условиям квантования не разрешается переход больше чем на один уровень в отличие от квантования по уровню и времени, где возможен переход через несколько уровней. Чем круче кривая, тем больше отставание функции
λ’(t) от λ(t).
Для уменьшения отставания необходимо уменьшать интервал квантования как q, так и ∆t.
Поэтому погрешность дифференциального квантования больше, чем при других видах квантования:
(17)
т.е. ошибка квантования в 4 раза превышает ошибку при обычном квантовании.
23
Достоинством дифференциального квантования является то, что квантованная функция передается только полярными признаками импульсов, т.е. значительно проще, чем при других видах квантования.
2.3. Кодирование
Код в телемеханике – это система электрических или пневматических сигналов для передачи сообщений двоичным или двоичнодесятичным кодом по каналу связи. Для представления и передачи отдельных элементов кода сигналы с различными признаками по амплитуде, частоте, полярности, фазе, длительности и др. Так, в двоичном коде при полярных признаках элемент "0" кодируется импульсом отрицательной, а "1"
– положительной полярности; широтные признаки означают различие в длительности импульсов либо в паузах между ними и так далее. Если для передачи сообщений используются не все возможные комбинации элементов кода, применяют специальные методы, позволяющие при приеме обнаруживать и исправлять искажения (ошибки) в переданных элементах кода, что повышает достоверность передачи информации.
Выбор системы кодирования сообщения, способа его передачи и методов повышения достоверности передаваемой информации определяется конкретными условиями работы телемеханической системы, важностью объектов, свойствами каналов связи, применяемой аппаратурой и др.
Кодирование – операция отождествления символов или групп символов одного кода с символами или группами символов другого кода. Необходимость кодирования возникает прежде всего из потребности приспособить форму сообщения к данному каналу связи или какому-либо другому устройству, предназначенному для преобразования или хранению информации. Так, сообщения представленные в виде последовательности букв, например русского языка, и цифр, с помощью телеграфных кодов преобразуются в определённые комбинации посылок тока. При вводе в вычислительные устройства обычно пользуются преобразованием числовых данных из десятичной системы счисления в двоичную и т.д.
Кодирование в теории информации применяют для достижения следующих целей:
1)для уменьшения так называемой избыточности сообщений;
2)для уменьшения влияния помех, искажающих сообщения при передаче по каналам связи (см. Шеннона теорема). Поэтому выбор нового кода стремятся наиболее удачным образом согласовать со статистической структурой рассматриваемого источника сообщений. В какой-то степени это согласование имеется уже в коде телеграфном, в котором чаще встречающиеся буквы обозначаются более короткими комбинациями точек и тире.
24
Кодирование, уменьшающее помехи, превратилось в большой раздел теории информации, со своим собственным математическим аппаратом, в значительной мере чисто алгебраическим.
Корректирующие коды
Помехоустойчивые коды, коды обнаружения и исправления ошибки, коды, позволяющие по имеющейся в кодовой комбинации избыточности обнаруживать и исправлять определённые ошибки, появление которых приводит к образованию ошибочных или запрещенных комбинаций применяются при передаче и обработке информации в вычислительной технике, телеграфии, телемеханике и технике связи, где возможны искажения сигнала в результате действия различного рода помех. Кодовые слова К. к. содержат информационные и проверочные разряды (символы). В процессе кодирования при передаче информации из информационных разрядов в соответствии с определёнными для каждого К. к. правилами формируются дополнительные символы – проверочные разряды. При декодировании из принятых кодовых слов по тем же правилам вновь формируют проверочные разряды и сравнивают их с принятыми; если они не совпадают, значит при передаче произошла ошибка. Существуют коды, обнаруживающие факт искажения сообщения, и коды, исправляющие ошибки, т. е. такие, с помощью которых можно восстановить первичную информацию.
В качестве примера рассмотрим код Хэмминга. Пусть требуется передать некоторое слово 1010. При кодировании оно будет представлено как 1011010, где 1-й, 2-й и 4-й разряды проверочные (слева направо 101), а остальные информационные. Если при передаче произошла ошибка, например в 3-м разряде вместо 1 получен 0, то при декодировании проверочные разряды примут значения: 1-й (младший) – 1, 2-й – 1, 4-й – 0 (т. е. 011). Несовпадение кодовых комбинаций проверочных разрядов не только сигнализирует о наличии ошибки, но и указывает номер искажённого разряда (011 – 3 в двоичном коде).
Корректирующая и обнаруживающая способность кодов зависит от кодового расстояния d между словами, численно равного минимальному числу ошибок, которое может превратить одно слово в другое. Например, имеется кодовая комбинация: 0111100; 0100101; 0010110. Первая группа (слово) отличается от второй в трёх разрядах, вторая от третьей — в четырёх разрядах, первая от третьей – в трёх разрядах. Минимальное расстояние d между этими словами равно 3. Если в первом слове произойдёт 3 ошибки, то оно может превратиться либо во второе, либо в третье слово; при декодировании такая ошибка не будет обнаружена. Максимальное число ошибок, которое в данном случае может быть обнаружено, равно 2. Если в первом слове произошла ошибка во втором разряде, то полученное слово отличается от второго в четырёх разрядах, от третьего – в двух разрядах, от первого – в одном разряде. Согласно максимального правдоподо-
25

бия методу при декодировании делается вывод, что, вероятнее всего, передавалось первое слово. Для правильного декодирования необходимо, чтобы максимальное число ошибок в передаваемом слове превращало его в слово, отличающееся от исходного в наименьшем числе разрядов. Чтобы исправлять все комбинации из t ошибок, необходимо и достаточно, чтобы d ³ 2t+1.
Ошибки в передаваемых словах могут возникать вследствие либо независимых искажений разрядов (в этом случае применяют, например, коды типа кода Хэмминга), либо искажений группы рядом стоящих разрядов (для таких случаев разработаны коды, исправляющие одиночные пачки ошибок, и коды, исправляющие более одной пачки ошибок); для обнаружения ошибок в процессе вычислений на ЭВМ разработаны так называемые арифметические коды.
2.4. Методы модуляции
Импульсные методы модуляции
Используя серию импульсов в качестве переносчика, мы можем меняя амплитуду, длительность, положение во времени, число импульсов и т.д. под воздействием сообщения, тем самым осуществлять импульсную модуляцию.
Амплитудно-импульсная модуляция (АИМ)
Под воздействием мгновенных значений сообщения амплитуда импульсов переносчика изменяется.
, |
(18) |
где Um – амплитуда модулированных импульсов, U – амплитуда немодулированных импульсов, ma – коэффициент глубины модуляции при АИМ,  – угловая частота сообщения.
– угловая частота сообщения.
Рис. 8. Временная диаграмма амплитудно-импульсной модуляции
Импульсы, модулированные по амплитуде, обладают спектром. отличным от немодулированной последовательности тем, что вокруг каждой составляющей спектра немодулированной последовательности появляется
боковые частоты fk ± fсообщ. Однако ширина полосы ∆F и в этом случае определяется практически длительностью импульсов и слабо зависит от мо-
26

дулирующей частоты, т. е. ∆F =µ/τ. Из-за низкой помехоустойчивости и погрешностей, возникающих при изменении коэффициента передачи линии связи, АИМ применяется в ТИ только как промежуточный вид модуляции (АИМ-ЧМ).
Широтно-импульсная модуляция (ШИМ)
При широтно-импульсной модуляции изменяется ширина или длительность импульсов переносчика за счет положения заднего импульса. Частота и амплитуда при ШИМ не изменяется. Помехоустойчивость ШИМ значительно выше АИМ, и ШИМ широко распространена в ТИ. При ШИМ необходимо выбирать полосу частот по наиболее короткому импульсу (∆F
=1/τmin).
Рис. 9. Временная диаграмма широтно-импульсной модуляции
Используются и другие разновидности ШИМ, когда изменяется положение переднего фронта импульсов при неизменном положении заднего фронта или изменяется положение обоих фронтов.
Время-импульсная модуляция (ВИМ)
Эта модуляция иногда называется фазоимпульсной модуляцией (ФИМ). Импульс сдвигается на +∆t при увеличении мгновенного значения и влево на –∆t при его уменьшении. При синусоидальной форме сообщения сдвиг, или девиация, импульса определяется как
∆t= ∆tmaxsinΩt. (19)
Полоса частот при ВИМ определяется практически длительностью импульса.
Частотно-импульсная модуляция (ЧИМ)
При увеличении мгновенного значения сообщения частота импульсов увеличивается, а при уменьшении мгновенного значения – уменьшается. Ширина полосы частот определяются длительностью импульса: ∆F=1/τ.
Кодоимпульсная модуляция (КИМ)
При КИМ сообщение квантуется по уровню и времени, а затем каждый дискретный уровень передается с помощью кода в дискретные моменты времени.
27
Дельта-модуляция ( -модуляция)
-модуляция)
Об этой модуляции указывается при осуществлении дифференциального квантования. В каждый момент времени передается или отрицательный или положительный импульс, соответствующий тому или иному знаку приращения. Таким образом, при любом числе уровней квантование осуществляется лишь двух дискретных сигналов, которыми передается только знак приращения функции. Это достоинство дельта-модуляции. Ее недостаток заключается в накоплении ошибок с течением времени. Так, если на приеме вместо положительного импульса в данный момент принят отрицательный, то это сместит значение функции на два уровня вниз. В дальнейшем, несмотря на правильность последующий передачи, эта ошибка будет существовать до тех пор, пока она не будет скомпенсирована ошибкой противоположного знака. Кроме того, ∆-модуляция несет в себе недостатки, связанные с квантованием по времени и по уровню, о чем говорилось выше.
Многократные методы модуляции
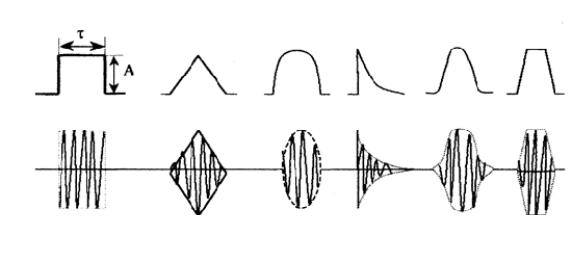
Сообщение может быть передано сложным сигналом, образованным несколькими поочередными модуляциями (рис. 10). Обычно такой сигнал является результатом двойной модуляции: первая модуляция – импульсная, в которой модулируется серия импульсов, или импульсная поднесущая, вторая – непрерывная, в которой модулируется несущая. При тройных модуляциях первая модуляция импульсная, вторая и третья непрерывная. Иногда применяются двойная модуляция импульсной поднесущей: сначала осуществляется АИМ, которая затем преобразуется в ВИМ или ШИМ, а затем производиться непрерывная модуляция несущей. В итоге возникает: АИМ-ВИМ-АМ, АИМ-ШИМ-ЧМ и т. д. Промодулированная по амплитуде серия импульсов в свою очередь модулирует ВЧ-несущую. В результате возникает сигнал в виде радиоимпульсов.
При модуляции ШИМ-АМ импульсы наполняются высокой частотой, в результате чего возникает радиоимпульсы одинаковой амплитуды и частоты, но разной длительности. Если вторичная модуляция частотная, что амплитуда сигналов одинакова, но частоты заполнения разные.
Так, при АИМ-ЧМ импульсу соответствует радиоимпульс частоты f, а импульсу с большей амплитудой соответствует радиоимпульс уже с большей частотой f. Импульс наименьшей амплитуды наполняется самой низкой частотой f. Интервалы времени между импульсами заполняются одной частотой, которая является немодулированной несущей. Двойная модуляция ШИМ-ЧМ отличается от ШИМ-АМ лишь тем, что интервалы между импульсами заполняется частотой несущей.
28

Рис. 10. Двукратные методы модуляции
По указанному принципу может быть получен любой другой вариант двойных модуляций. Правило их построения очевидно: сначала сообщение модулирует импульсную поднесущую (серия видеоимпульсов), которая превращаясь в сигнал, в свою очередь модулируют ВЧ-несущую.
Для осуществления тройной модуляции сообщение сначала модулируется одним из видов импульсных модуляций. Далее полученный сигнал модулирует первую непрерывную поднесущую. Новый сигнал, в свою очередь, модулирует несущую.
2.5. Достоверность передачи информации
Достоверностью называется степень соответствия принятой информации переданной информации.
Оценкой достоверности служит вероятность правильного приема, равная отношению числа правильно принятых символов сообщения (знаков, цифр, элементов сообщения) к общему числу переданных символов при достаточно большом числе передаваемых сообщений. Обычно такое отношение определяется за некоторый промежуток времени. Иногда пользуются понятием потеря достоверности, которая оценивается частностью ошибок:
|
n |
(20) |
|
hош = |
|
ош |
|
n |
общ |
||
|
|
|
|
где nош – число неправильно принятых символов сообщения; nобщ – общее число переданных символов сообщения.
Искажения возникают:
29

при преобразовании сообщения в сигнал; при передаче и приеме сигналов; при преобразовании сигнала в сообщение;
из-за особенностей распространения сигнала по линии связи; из-за недостаточной помехозащищенности сигнала. Возникают искажения: линейные, нелинейные и случайные.
Линейные искажения не сопровождаются появлением новых частотных составляющих в спектре сигнала. Разделяются на частотные (ам- плитудно-частотные) и фазовые.
Частотные искажения вызываются неравномерным воспроизведением амплитуд отдельных гармонических составляющих сигнала при его прохождении через электрическую цепь из-за наличия в цепях сосредоточенных распределенных реактивностей, зависящих от частоты. Так электромагнитная энергия высоких частот при распространении по линии связи затухает больше, чем электромагнитная энергия НЧ.
На рисунке показано воспроизведение импульса прямоугольной формы тремя гармониками (первой, третьей и пятой) и постоянной составляющей:
а) исходный импульс; б) импульс при амплитудных искажениях (уменьшается амплитуда и
искажается форма).
Рис. 11. частотные искажения сигнала
Фазовые искажения вызываются неодинаковым относительным сдвигом во времени отдельных гармонических составляющих сигнала при его прохождении через электрическую цепь. Причина: электромагнитная энергия ВЧ распространяется по линии с большей скоростью, чем электромагнитная энергия НЧ. Появляется сдвиг начала импульса и искажение его формы.
Иногда появляется уменьшение длительности τ1’ по отношению к τ1. К линейным искажениям относятся и искажения из-за ограничения полосы пропускания.
30
Нелинейные искажения сопровождаются появлением в спектре сигнала новых гармонических составляющих из-за наличия в цепи нелинейных элементов. Искажается форма сигнала.
Случайные искажения вызываются помехами в канале, которые могут создать ложный сигнал или подавить основной сигнал.
Изменения видеоимпульсов возникают из-за краевых искажений и дробления.
Из-за краевых искажений возникает сдвиг переднего фронта импульса. Краевые искажения делятся на искажения преобладания, характеристические и случайные. При преобладаниях импульсы одного знака полярности удлиняются за счет укорочения импульсов другого знака. Характеристические искажения проявляются в виде выбросов, обусловленных характером переходного процесса, искажений формы импульсов и смещений их фронтов код воздействием переходного процесса от предыдущей посылки, который не успевает закончиться. Смещения фронтов импульсов возникают под воздействием случайных помех.
В видео и радиоимпульсах наблюдаются:
-дробления: изменения полярности импульса, как на части импульса, так и на всей его длительности;
-искажения по соседнему каналу (переходные искажения) вычитываются влиянием смежных каналов, т.к. реальные фильтры не полностью отфильтровывают одну полосу частот от другой;
-перекрестные искажения возникают при одновременной передаче информации от многих источников в различных частотных диапазонах вследствие нелинейности ряда общих для всех каналов элементов и узлов схемы (усилители, демодуляторы и т.п.).
2.6.Организация каналов связи для передачи информации
Для передачи телемеханической информации применяют линии проводной связи, линии электроснабжения и радиотракт (радиорелейные линии, радиопередатчики, радиоприемники, микроволновую и сотовую связь), оптическую связь.
Наиболее широко распространены проводные линии связи. Если они используются только для передачи ТМ-информации, то называются физическими проводниками линиями связи. Эту пару проводов (воздушную или экранированную) можно использовать для передачи многих сообщений методами временного или частичного разделения сигналов (уплотнение линии связи). Физическая цепь или самостоятельная двухпроводная линия связи – лучший вариант для организации каналов связи, по которым можно передавать телемеханические сообщения. Однако он дорог, и про-
31
кладка самостоятельной (воздушной или кабельной) линии связи на большие расстояния производят в исключительных случаях.
Как правило, по проложенным проводам передается информация связи (телеграфные и фототелеграфные сообщения, телефонная связь, передача данных, звуковое вещание и т.д.), а для целей ТМ предназначается телеграфный или телефонный канал, то есть выделяется определенная полоса частот.
При небольших скоростях передачи сигналов ТМ (50-75 Бод) применяют телеграфные каналы (обычно каналы тонального телеграфирования), а при скоростях до 4800 Бод требуется телефонный канал. При более высоких скоростях передачи используют телевизионные каналы.
ТМ информацию можно передавать в разных диапазонах частот: тональном (300-3400 Гц), надтональном (3400-5300 Гц), высокочастотном (свыше 5300 Гц), а иногда и в подтональном (40-300Гц).
Передача одного или двух телемеханических сообщений можно осуществлять по занятому телефонному каналу, не прерывая разговора, то есть без выделения специальной полосы частот (упрощенное уплотнение).
Линии должны быть надежными, помехоустойчивыми и безотказными.
Каналы связи по физическим проводным линиям связи. Основные характеристики
Воздушные линии связи
Воздушные линии связи состоят из металлических проводов, подвешенных с помощью изоляторов и специальной арматуры на столбах. В зависимости от условий, в которых находятся подвешенные провода (гололед, ветер и т.п.), различают воздушные линии связи 4-х типов:
обессиленного, нормального, усиленного, особо усиленного.
В качестве проводов (линейной проволоки) применяют провода:
Стальной D 5;4;3;2.5;2;1.5 мм; Медный D 4;3.5;3мм;
Биметаллический сталемедный (покрытие меди 0,2 мм) D 4;3;2;1.6мм.
Биметаллический сталеалюминиевый D 2.6-6.5мм. Стальная воздушная линия fmax до 30 Гц.
Медная воздушная линия fmax до 180 Гц.
Недостатки: подверженность внешним помехам, малая надежность, большая утечка при ухудшении атмосферных условий (гроза, дожди, голо-
32
лед), большие затраты материалов при сооружении и необходимость постоянного профилактического обслуживания. При снижении tº на 80°С. Rакт меняется в 1, 5 раза.
Кабельные линии связи
Кабель состоит из изолированных параллельных проводников, заключенных в общую влагозащитную оболочку и иногда в броневые покровы. Различают подземные, подводные и воздушные кабели, симметричные и коаксиальные
Первичные параметры проводных линий связи
Первичными параметрами проводных линий связи являются активное сопротивление R (Ом/км), индуктивность L (Гн/км), емкость C (Ф/км), проводимость изоляции G (1/Ом Хкм)
Активное сопротивление R=R0+Rп.э.+Rбл+Rм,
где R0 – сопротивление постоянного тока; Rп.э – сопротивление поверхностного эффекта; Rбл – сопротивление эффекта близости; Rм – сопротивление потерь в металле (в соседних кабельных цепях и свинцовой оболочке).
Для кабеля учитывают все 4 составляющие, для воздушных линий – только первые два, так как Rбл и Rм малы.
R0 зависит от D провода материала t° и способа скрутки жил. Rп.э сопротивление переменному току.
Rбл эффект близости, так же как и поверхностный эффект, возникает за счет взаимного влияния рядом расположенных токонесущих проводов, так как магнитное поле каждого из двух проводов создает вихревые токи в соседнем проводе. Взаимодействие вихревых токов с основным током приводит к увеличению плотности тока на обращенных друг к другу поверхностях проводов.
Rбл увеличивается при уменьшении расстояния между проводами. Rм возникает из-за того, что вихревые токи, создаваемые внешним
магнитным полем цепи, нагревает окружающие металлические части.
L зависит от расстояния между проводами D (уменьшается с увеличением D), от материала (у стали L больше, чем у меди) и f.
С зависит от расстояния между проводами (увеличивается с уменьшением расстояния) D и материала диэлектрика между проводами цепи.
LC=µε,
где µ и ε - магнитная и диэлектрическая проницаемости. Для воздушной линии LC=1, для кабеля LC= ε.
Проводимость изоляции (утечка) зависит от типа изоляции, частота тока (возрастает с увеличением ƒ) и климатических условий. Для воздушных цепей на утечку влияют также гололед и иней.
Различают однородные и неоднородные линии.
Вторичные параметры проводных линий - волновое сопротивление ZВ и постоянная передача γ.
33

Сопротивление, которым можно заменить отрезанную часть бесконечно длинной линии так, что при этом в любых точках оставшейся линии значения тока и напряжения будут прежними, называют волновым или характеристическим сопротивлением.
ZВ=√ (R+jωL)/(G+ jωC)
При частотах больше 10 кГц R и G весьма малы по сравнению с ωL и ωС, поэтому можно считать, , что ZB=√L/C.
Для медных воздушных линий связи Zb=600-900 Ом. Сопротивление, измеренное в начале линии, называется входным со-
противлением ZB=Uвх/Iвx,
где Uвх и Iвx – напряжение и ток на входе линии.
Входное сопротивление линии зависит от волнового сопротивления линии, затухания линии и величины нагрузки в конце линии.
Входное сопротивление совпадает с волновым сопротивлением только тогда, когда сопротивление нагрузки ZH=ZB. Только в этом случае будет наилучшая передача электромагнитной энергии, т. е. будет наибольший к. п. д. передачи, так как будет отсутствовать отражение волн.
Постоянная передачи, или коэффициент распространения:
где |
|
γ= |
|
|
|
, |
(21) |
|
коэффициент затухания, |
|
коэффициент сдвига фазы. |
|
|||
|
|
|
|||||
|
|
||||||
|
Обычно затухание в линии измеряют в децибелах: |
|
|||||
|
|
α = 20lg |
P1 |
[дБ]. |
(22) |
||
|
|
P |
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||
Каналы связи в выделенной полосе частот проводной линии связи
При передаче небольшого количества ТМ сообщений на большие расстояния иногда оказываются экономически нецелесообразной прокладка отдельной линии, то есть осуществление передачи по физическим линиям связи.
Стоимость таких линий связи может значительно превышать стоимость самой системы ТМ. В этом случае целесообразно использовать уже проложенные линии для передачи сообщений связи: телеграф, телефоны и др. При этом полоса пропускания, которой обладает линия, разделяются на ряд телефонных каналов (первичное уплотнение), каждый из которых в свою очередь может делиться на телеграфные каналы (первичное уплотнение), каждый из которых в свою очередь может делиться на телеграфные каналы с шириной полосы частот, как правило, до 140 Гц (вторичное уплотнение)
∆t телеграфного канала достаточна для передачи обычного ТМ сообщения, тем более что для образования телеграфных каналов существует хорошо налаженная аппаратура для передачи телеграмм и других сообщений связи. Поэтому в этом случае происходит простая замена сообщений.
34