

TSA
.pdf1.Классификация приборов и устройств ГСП. Агрегатные комплексы ГСП (Классификация и краткая характеристика).
Для уменьшения количества средств измерения и автоматизации путем унификации их принципов измерения и конструкций создана Государственная система промышленных приборов и средств автоматизации (ГСП). Все средства ГСП по функциональному назначению подразделены на четыре группы:
1. Средства получения нормированной информации о состоянии объекта автоматизации. Сюда относятся датчики и нормирующие преобразователи. 2. Уст-
ройства для приема, преобразования и передачи информации по каналам связи. В эту группу входят устройства телемеханики, телесигнализации, телеуправления, шифраторы, дешифраторы и устройства согласования, используемые для приема, преобразования и передачи сигналов на большие расстояния. 3. Средства пре-
образования, обработки, хранения информации и выработки команд управления включают в себе анализаторы сигналов, функциональные и операционные пре-
образователи, устройства памяти, регуляторы, задатчики, управляющие вычислительные машины. 4. Устройства использования командной информации для воздействия на объект включают в себя исполнительные устройства, состоящие из усилителей мощности входных сигналов и исполнительных механизмов, воздействующих на регулирующие органы, которые регулируют поступающий в объект регулирования поток энергии или материалов. Все средства ГСП подразделены на три ветви: электрическую, пневматическую и гидравлическую. Выпускаются также комбинированные средства автоматизации: электропневматические, электрогидравлические.
В ГСП входят и устройства, работающие без вспомогательной энергии (регуляторы прямого действия). АСУТП из приборов электрической энергии имеют преимущество по чувствительности, точности, быстродействию, дальности связи. Применение интегрированных микросхем способствует уменьшению габаритов. Приборы пневматической ветви характеризуются безопасностью в применении в легковоспламеняемых и взрывоопасных средах, высокой надежность в тяжелых условиях. Гидравлические приборы позволяют получить точные перемещение при больших усилиях Агрегатный комплекс - совокупность изделий, взаимосвязанных м/у собой по функциональному назначению или области применения. АК содержит технически и
экономически обоснованную номенклатуру изделий, созданных на единой конструктивной, элементной и технологической базе, с использованием блочного типа построения на основе базовых моделей, и обеспечивает решение всех функциональных задач, соотв. назначению комплекса. АСЭТ - агрегатный комплекс средств электроизмерительной техники, АСНК - неразрушающий контроля, и др.
2.Функциональное назначение средств приема, преобразования и передачи информации по каналам связи в АСУ ТП. В каких случаях используют-
ся УСО и телемеханические системы.
Функциональное назначение средств приема, преобразования и передачи информации по каналам связи АСУТП состоит в приеме унифицированных сигналов от измерительных преобразователей, кодирование их для передачи по каналам связи и дешифрование в форму, удобную для в устройствах центральной части ГСП. Технически эти функции реализуются устройствами телеизмерения, телемеханики, телесинтеза, телеуправления, системами передачи данных, устройствами связи с объектом и согласования. Реализация устройств приема, преобразования и передачи информации для территориально-распределенных ТОУ осуществляется в телемеханических схемах и в виде средств передачи данных. В сравнительно простых АСУТП с территориально-сосредоточенными объектами каналы приема и передачи информации строятся в основном на базе УСО.
3. |
УСО для ввода аналоговой информации и релейных сигналов ЦАП и АЦП. Их назначение, классификация. |
|
|
|
|
|
|
|
схема УСО для ввода релейных сигналов. Д-датчик, НП-нормирующий преобразователь, Ф-фильтр, УК-блок унифицированно- |
|
|
|
|
|
|
|
|
Д |
|
НП |
|
Ф |
|
УК |
||
го кодирования. УСО для ввода аналоговой информации бывают 2-х типов: устройства с параллельным вводом информации и |
|
|
|
|||||
|
|
|
|
|
|
|
||
устройства с последовательным вводом информации. |
…. |
|
…. |
|
…. |
|
|
|
Неотъемлемой частью современных автоматических измерительных приборов и систем контроля и управления являются пре- |
|
|
|
|
|
|
|
|
Д |
|
НП |
|
Ф |
|
|
||
образователи аналоговых и цифровых сигналов: аналого-цифровые преобразователи (АЦП), цифро-аналоговых преобразовате- |
|
|
|
|
||||
ли (ЦАП), частотно-цифровые преобразователи (ЧЦП). Учитывая, что большинство измеряемых физических величин являются аналоговыми, а их обработка, вычисление, индикация и регистрация осуществляются, как правило, цифровыми методами, АЦП и ЦАП широко применяют в автоматических измерительных устройствах. На их основе создаются преобразователи и генераторы практически любых функций, корреляторы, анализаторы спектра и т.д. Наиболее перспективными являются линейные АЦП и ЦАП в микроэлектронном исполнении. Кроме того, как правило, для обеспечения требуемой помехоустойчивости выводятся две земляные шины: аналоговая земля АЗ и цифровая земля ЦЗ ЦАП - устройство, которое создает на выходе аналоговый сигнал (напряжение или ток), пропорциональ-
ный входному цифровому сигналу. При этом значение выходного сигнала зависит от опорного напряжения Uоп, определяющего полную шкалу выходного сигнала. ЦАП различают по уровням выходного на-
пряжения: 2,5; 5; 10; 10,24; 20 В. Наиболее часто применяются значения 10 и особенно 10,24 которые удобны при двоичном кодировании.
В АЦП цифровой код на выходе определяется отношением преобразуемого входного аналогового сигнала к опорному сигналу, соответствующему полной шкале. Электрические сигналы на входах и выходах ЦАП и АЦП можно обозначить следующим образом: цифровой входной (выходной) код Nвх(Nвых), аналоговый выходной (входной) сигнал ACвх(ACвых), напряжение источника питания UП, сигнала управления (строб-импульс, запуск АЦП), опорное напряжение.
4.Дайте классификацию ЦАП и поясните принцип действия одной из схем.
4 ЦАП с резистивной матрицей типа R-2R. Недостатки, свойственные ЦАП с разрядными сопротивлениями, номиналы которых меняются по двоичному закону, исключаются, если в качестве формирователей разрядных токов использовать многозвенную цепочку резисторов типа R-2R. (рис. 3.23). В этом случае резистивная цепочка состоит из резисторов только двух номиналов. Уменьшение формируемых значений разрядных токов (также по двоичному закону) обеспечивается включением резисторов таким образом, что резисторы более старшего разряда участвуют в формировании (уменьшении) разрядных токов более младших разрядов. Это и позволяет реализовать формирователь разрядных токов на резистивной цепочке только с двумя номиналами.
ЦАП с токовыми ключами. Все структуры ЦАП с токовыми ключами можно подразделить на два вида: в одних разрядные токи формируются с помощью пассивных элементов (резистивных цепочек), а в других - с помощью активных элементов (генераторов тока).
Примерами первого вида схем ЦАП может служить устройство, аналогичное схеме на рис.3.23, но ключами осуществляется коммутация не напряжений, а токов, поэтому схема обладает высоким быстродействием, практична, надѐжна и легко реализуется в интегральной технологии. По данной схеме серийно выпускаются 10- и 12разрядные ЦАП в интегральном исполнении (ИМС ЦАП К572ПА1, К572ПА2).
5. Поясните основные характеристики технических средств автоматизации (статических, динамических, метрологических, информационных и др.).
При проектировании автоматических систем регулирования технологическими процессами необходимо выбрать регулятор и рассчитать параметры его настройки, которые обеспечат устойчивость и качество функционирования систем регулирования. Для решения этой задачи и сформулированы требования к качеству регулирования; т. е. к качеству переходных процессов.
Характерные кривые переходных процессов при ступенчатых возмущениях по заданию (а) и по нагрузке (б) Рис. Переходные процессы регулирования: 1 — без остаточного отклонения; 2 — с остаточным отклонением; 3 — кривая разгона объекта; 4 — апериодически переходный процесс; 5 — процесс с 20%-ным перерегулированием; 6 — процесс с минимальным интегральным критерием.
Качество переходных процессов в системе определяется совокупностью показателей, которые могут быть условно разделены на прямые и косвенные. Те и другие широко используются при выполнении расчетов по

выбору регуляторов и его настроек. 1) Статическая ошибка XСТ , определяемая как отклонение регулируемой величины X от заданного значения Х0 в установившемся режиме. 2) Максимальное динамическое отклонение x1 равное максимальному отклонению регулируемой переменной X от заданной величины Х0 в процессе регулирования. Относительная величина этого показателя носит название динамического коэффициента регулирования RД и характеризует степень воздействия регулятора на отклонение регулируемой переменной.
6.Электрические регуляторы (приборные и аппаратные).
ЭР разделяют на 2 типа: ПРИБОРНЫЕ (милливольтметры, мосты, потенциометры) - Измерительные приборы со встроенными электрическими регулирующими устройствами для позиционного и пропорционального регулирования. Достоинством регуляторов такого типа является применение уже готовых измерительных схем. Также они отличаются простотой, надежностью, несложной наладкой и обслуживанием. Однако, реализуют как правило простейшие законы регулирования и могут применяться только в тех случаях, когда не требуется высокое качество регулирования. Приборные регуляторы выполняются в виде 2-х самостоятельных блоков – измерительного и регулирующего, установленных в одном корпусе. Измерительный блок – для сравнения текущего значения измеряемой величины с сигналом задатчика. Сигнал рассогласования усиливается и поступает в регулирующий блок, в котором по заданному закону формируется регулирующее воздействие на исполнительное устройство.
АППАРАТНЫЕ - представляют собой автономные регулирующие приборы, воспринимающие сигналы непосредственно от датчиков и реализующие заданный закон регулирования и передающие на исполнительное устройство полученные управляющие воздействия. Эти регуляторы применяются во всех областях промышленности, особенно в химической. В их состав входят следующие комплексы регулирующих и функциональных блоков: регуляторы в системе КАСКАД (рассчитанные на работу с отечественными измерительными приборами, с унифицированными выходными сигналами постоянного тока 0-5мА, 0-20мА и электрическим ИМ-ом МЭО-5 и МЭК-К).
7.Функциональная схема одноканального вторичного прибора ДИСК-250 и встроенные в него устройства регулирования.
Микропроцессорные одноканальные приборы ДИСК -250 М применяются для измерения, регистрации, сигнализации и регулирования параметров техпроцессов ( температура, давления, уровня, расхода и т.д.) в металлургии, энергетике, химической,
нефтехимической, нефтеперерабатывающей, пищевой, целлюлозно - бумажной и других отраслях промышленности.
1-первичныей прибор, 2-входное устройство нормализации сигнала, 3-предварительный усилитель, 4-основной усилитель, 5- реохорд, 6-усилитель сигнала реохорда, 7- реверсивный двигатель , 8 – Усилитель дисбаланса, 9 - Выходной сигнал «Много», 10 - Выходной сигнал «Мало», 11Выходное устройство 3-х позиционного регул-я, 12 – вых. устройство унифицированного сигнала Выходной сигнал сначала нормализуется, затем усиливается и после этого осуществляется уравновешивание. Вторичный
прибор предназначен для работы с П-, ПИ-, ПИД-регуляторами, выпускаемые с реостатными задатчиками с 10% зоной пропорциональности. Ползунок 10% задатчика через дифференциальный рычажный механизм связан со стрелкой.
8.Обобщенная классификация автоматических регуляторов. Дайте краткую характеристику всех групп регуляторов.
Регулятор автоматический (от лат. regulo — привожу в порядок, налаживаю), устройство (совокупность устройств), посредством которого осуществляется регулирование автоматическое. С помощью чувствительного элемента — датчика — Р. в зависимости от принципа регулирования измеряет или регулируемую величину, или возмущающее воздействие и при помощи преобразовательного или вычислительного устройства в соответствии с законом регулирования вырабатывает воздействие на регулирующий орган объекта. В состав Р. могут также входить настраиваемые корректирующие устройства для обеспечения устойчивости и требуемого качества процесса регулирования и усилители, повышающие мощность выходной величины Р. до значения, достаточного для приведения в действие исполнительного устройства, которое управляет состоянием регулирующего органа.
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии. По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные. По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональны, пропорционально-дифференциальные, пропорцио- нально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости. По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами. По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
9. Линейные регуляторы. Уравнения пропорционального и интегрального регуляторов, их переходные характеристики, различия и обл. применения.
Регуляторы, которые позволяют реализовать теоретические (стандартные) законы регулирования, называются идеальными. В этих регуляторах операции интегрирования, дифференцирования, суммирования и умножения на постоянный коэффициент выполняются абсолютно точно. Рассмотрим динамические характеристики регуляторов с различными стандартными законами регулирования.
10. ПИ- и ПДрегуляторы, их уравнения и переходные характеристики, области применения. |
|
|
|
|
||
Пропорционально-интегрально-дифференциальный (ПИД): |
|
|
|
|
|
|
ПИД |
|
|
|
1 |
|
|
|
Wp |
( p) k p |
TД p 1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
TИ p |
|
Коэффициенты Кр, ТИ, Тс, Тд называются параметрами настройки регулятора. Приняты следующие наименования этих параметров: КР — коэффициент передачи; Тс — постоянная интегральной части; Тя
— постоянная времени интегрирования; Тд — постоянная времени дифференцирования.
Рис. 1. Переходные характеристика регуляторов с идеальными (а) и реальными (б) динамическими характеристиками.
П — пропорциональный алгоритм; И — интегральный алгоритм; ПИ —пропорционально- интегральный алгоритм; ПИД — пропорционально-интегрально-дифференциальный алгоритм.
Математическое выражение переходной характеристики ПИД-алгоритма имеет вид:
k p где: δ(t) — дельта-функция; 1(t) — единичная ступенчатая функция. h(t) k p TД (t) k p 1(t) TИ t 1(t)
11. Релейные регуляторы. Классификация их, переходные характеристики в системе с 2-х позиционными Рп2 – регуляторами.
Релейные системы регулировании имеют в качестве одного на основных звеньев реле, поэтому непрерывное изменений регулируемой величины вызывает прерывистое (релейное) действие регулирующего воздействия. Работа релейного элемента характеризуется тем, что при достижении регулируемой величиной порогового значения его входная величина скачкообразно возрастает. Примером релейного элемента является электромагнитное реле, сердечник которого притягивается только при достижении током катушки определенного значения. При этом замыкаются контакты реле в коммутирующей цепи. Примером релейной системы может служить также система управления работой бытового холодильника. В зависимости от числа возможных положений регулирующего органа релейные системы бывают двух- и трехпозиционными. Двух позиционные системы имеют два возможных положения регулирующего органа «открыто—закрыто» или «включено—выключено». В трех-

позиционный системах к этим положениям прибавляется еще и третье, обычно промежуточное положение. Релейные системы конструктивно наиболее просты и обладают большим быстродействием, однако они имеют меньшую точность регулирования по сравнению с импульсными и непрерывными системами. Переходные процессы в системе с двухпозиционным регуляторами: а — статическая характеристика двухпозиционного регулятора с зоной неоднозначности; б
— переходные процессы и системе регулирования без запаздывания; в — переходные процессы и двухпозиционном регуляторе
12. Регуляторы постоянной скорости (Рс – регуляторы). Уравнение регулятора, принцип работы и область применения.
Регуляторы постоянной скорости (Рc-регуляторы) обеспечивают трехпозиционное управление исполнительными механизмами в соответствии с выражением:
|
dy |
|
1 |
sgn X ( X 0 |
) |
где ε – половина зоны нечувствительности релейного устройства; l/TИМ – максимальное значение |
|
d |
|
TÈÌ |
|
|
|
скорости перемещения исполнительного механизма (7'им — время полного хода). Рс-регулятор работает следующим образом. При значении регулируемой величины X < X0 – ε (X > X0 + ε) исполнительный механизм включен и с максимальной скоростью перемещает регулирующий орган в направлении, обеспечивающем повышение (уменьшение) величины X. В пределах зоны нечувствительности регулятор не реагирует на величину и направление изменения ошибки. Статическая характеристика такого регулятора может быть представлена как зависимость скорости изменения регулирующего воздействия dy/dη: от величины ошибки (рис.). Максимальная статическая ошибка Рс-регулятора, как и у всех видов релейных регуляторов, ζ ≥ ε. Динамическая ошибка определяется свойствами объекта, значениями максимальной скорости перемещения исполнительного механизма и шириной зоны нечувствительности релейного устройства. Величины максимального значения скорости 1/TИМ и зоны нечувствительности 2ε являются
параметрами настройки регулятора. В регуляторе постоянной скорости предусмотрены системы измерения, элементы сравнения измеренного и заданного значений регулируемой величины и трехпозиционный релейный элемент с ограниченной регулируемой зоной нечувствительности. Формирование Рс-закона регулирования осуществляется электрическими позиционными устройствами вторичных электронных приборов, работающих в комплекте с исполнительными механизмами, которые имеют постоянную скорость при ±X ≥ ±ε, вне зависимости от величины поступившего в объект возмущающего воздействия.
13. Регуляторы с переменной структурой. Схема регулятора и область применения его.
Регуляторами с переменной структурой называют приборы, содержащие ключевые (релейные) элементы, которые в соответствии с выбранным законом размыкают или восстанавливают различные каналы передачи информации. Структурная схема регулятора меняется в течение переходного процесса таким образом, чтобы обеспечить высококачественное выполнение задач управления.
В общем виде регулятор с переменной структурой можно представить в виде трех функциональных элементов: измерительного устройства ИУ, формирователя функции переключения ФФП и блока коммутируемых коэффициентов БК. Назначение измерительного устройства ИУ состоит в преобразовании сигнала Х0, пропорционального заданному значению регулируемой величины, и сравнении его с измеренным значением X регулируемой величины. Сигнал ошибки x1 = Х0 — X с выхода блока ИУ поступает на блоки БК и ФФП. Блок ФФП формирует функцию переключения s. Преобразование структуры регулятора осуществляется в момент перехода через нуль функ-
ции s, заданной уравнением: s=c1x1+c2x2 В блоке ФФП сигнал ошибки х1 дифференцируется и величина х2=dx1/dη поступает на выходной суммирующий усилитель с релейной характеристикой. Требуемое соотношение коэффициентов c1 и с2 обеспечивается введением на второй вход усилителя дополнительного сигнала хг с соответствующим коэффициентом. Функция Ъ преобразуется выходным усилителем в релейный сигнал Usgns, являющийся выходным сигналом блока ФФП. Блок БК формирует управляющее воздействие U и осуществляет скачкообразное изменение структуры регулятора в соответствии с логическим законом, записываемым в виде:
ÿ ïðè sz 0; где αz, βz - коэф. каналов регулятора; z - любая из коммутируемых координат х1. у или U.z
z ïðè sz 0.
Этот блок состоит из логических переключающих устройств (ЛПУ), реализующих закон регулирования и выходного сумматора, на котором формируется управляющее воздействие U. В зависимости от вида решаемой задачи в БК могут использоваться от одного до трех ЛПУ. Соответственно этому управляющее воздействие U будет представлять собой комбинацию одного, двух или трех сигналов вида: U z z
Характерно наличие в регуляторе с переменной структурой блока БК., который обеспечивает скользящий режим работы в требуемых областях фазового пространства (х1, x2), в то время как другие типы регуляторов содержат блоки, аналогичные ИУ и ФФП. Для примера можно назвать пневматический регулятор с переменной структурой ПР5.1. Он подразделяется на регулирующую и логическую части. Регулятор ПР5.1 предназначен для работы на объектах подверженных частым и значительным возмущениям и имеющих большие времена запаздывания, на которых применение обычных регуляторв не дает удовлетворительных результатов.
14. Импульсные регуляторы. Дайте определение регулятора и видов модуляции сигналов. Назовите достоинства регуляторов по сравнению с непрерывными регуляторами и области их эффективного применения.
Модуляция (от лат. modulatio — мерность, размеренность) в физике и технике, изменение по заданному закону во времени величин, характеризующих какойлибо регулярный процесс.
Импульсными регуляторами называют регуляторы дискретного действия, в структуре которых имеется импульсный элемент, преобразующий непрерывно изменяющуюся регулируемую величину в последовательность импульсов. Параметры импульсов меняются в соответствии со значениями входной величины модулирующего сигнала. Модулируемым параметром для последовательности импульсов на выходе импульсного элемента может быть амплитуда импульса, его ширина и интервал времени между импульсами. В соответствии с этим .различают три вида модуляции импульсов: 1) амплитудно-импульсную (АИМ), при которой модулируемым параметром, зависящим от значениявходного сигнала хвх (рис. а) вначале очередного периода ТИ повторения импульсов, является высота (ам-
плитуда) импульсов А (рис. б); 2) широтнр-импуфсную (ШИМ), при которой модулируемым параметром является ширина импульса ТИ (рис. в); 3) |
время- |
импульсную (ВИМ), которая подразделяется на фазоимпульсную (рис. г) и частотно-импульсную. В первом случае модулируемым параметром является |
вели- |
чина запаздывания Т3 импульса относительно начала периода. Во втором — частота fИ = 1/TИ следования импульсов.
Импульсные регуляторы по сравнению с непрерывными имеют следующие преимущества, обусловленные прерывистым характером передачи сигналов между отдельными частями системы управления: возможность многоточечного управления; многократное использование линий связи; повышенную помехозащищенность. Кроме того, импульсные регуляторы могут применяться для управления объектами с запаздыванием, когда другие типы регуляторов не подходят. В тех случаях, когда объекты управления многочисленны, характеризуются большими постоянными времени, малыми скоростями изменения переменных, целесообразно управлять с помощью одного импульсного регулятора путем его циклического подключения последовательно к каждому объекту. Промежуток времени между двумя очередными импульсами, поступающими на один и тот же объект, используется для обмена дискретными сигналами с другими объектами. В результате система управления существенно упрощается по сравнению со случаем применения для каждого объекта отдельного регулятора.
Рис. Виды импульсной модуляции
15.Цифровые регуляторы (ЦР), Дайте определение ЦР и поясните основные достоинства. Каким образом реализуется регулирующие воздействие в ЦР применительно к законам регулирования идеальных линейных регуляторов. Покажите на примере законов регулирования цифрового П- регуля-
тора и И- регулятора.
Цифровыми регуляторами называют приборы, в которых информация об управляющем сигнале хотя бы в одном из блоков выражается в цифровом коде и для ее обработки используют средства цифровой вычислительной техники. Для представления сигнала в цифровом коде в регуляторе осуществляется квантование сигнала по времени и по уровню. Цифровые регуляторы обладают следующими достоинствами: 1) высокой точностью измерения регулируемой величины, зависящей от числа разрядов используемого цифрового кода; 2) пониженной чувствительностью к помехам на всех стадиях преобразования сигнала; 3) возможностью использования в качестве регулирующего устройства ЦВМ и УВМ; 4) возможностью использования любого из алгоритмов регулирования; 5) способностью автоматически обнаруживать и исправлять возникающие при обработке сигналов ошибки и искажения. Такие регуляторы обычно многоканальные и используются для управления большим количеством объектов посредством машин централизованного контроля и управления.
Работа цифрового регулятора определяется его динамическими свойствами, для описания которых можно применить законы регулирования линейных идеальных
регуляторов. Однако в цифровых регуляторах законы регулирования вырабатываются в цифровой форме. При воспроизведении регулирующих воздействий в |
||||||||
цифровой форме операции интегрирования и получения производной соответственно заменяются операциями суммирования и вычисления разности. |
||||||||
Закон регулирования цифрового П-регулятора может быть записан в виде: |
|
yÏ * k1 |
x * nT , |
где f и fз – соответственно текущее и заданное значения |
||||
|
|
* k |
nT |
|
f )d |
|
||
y |
Ï |
|
|
( f |
Ç |
|
||
|
1 |
|
|
|||||
|
|
|
|
nT |
|
|
|
|
частоты входных сигналов; k1 и k’1 – коэффициенты; Т — период времени; θ — интервал, определяющий время преобразования; п = 1, 2, ...
Параметрами настройки цифрового П-регулятора являются коэф-ты k1 или k’1 и интервалы времени Т и θ.
Закон регулирования цифрового И-регулятора выражается уравнением: |
|
|
|
|
n |
|
|
|
|
|
|
yÈ * k2 x * iT , |
|
||||||||
|
|
|
||||||||
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
n |
iT |
|
|
|
|||
y |
È |
* k |
|
|
|
( f |
Ç |
|
f )d |
|
|
2 |
|
|
|
||||||
|
|
|
i 1 |
|
iT |
|
|
|
|
|
Параметрами настройки цифрового И-регулятора являются коэф-ты k2 или k’2 и интервалы времени Т и θ.
16. Напишите алгоритмы работы цифровых ПИ- и ПИДрегуляторов.
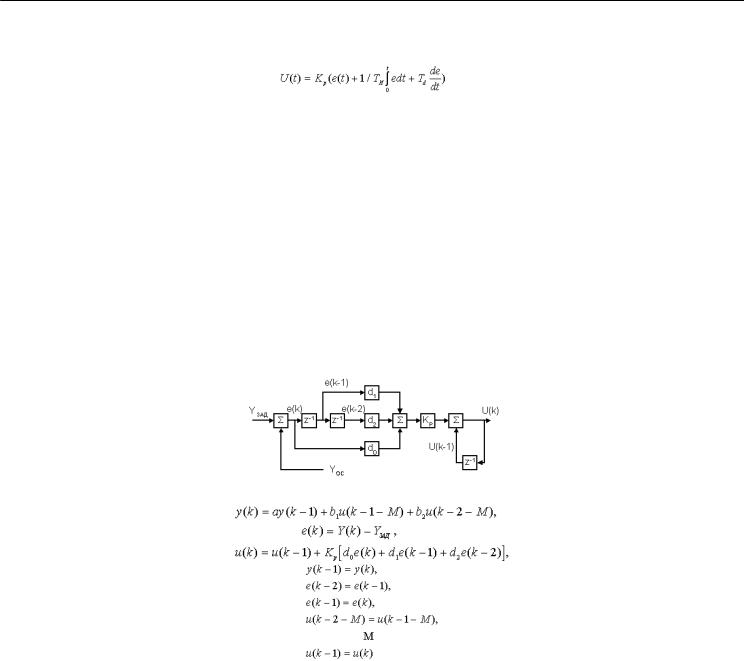
Наиболее распространенными алгоритмами являются ПИ и ПИД алгоритмы цифрового управления. При правильной настройке эти алгоритмы обеспечивают достаточно хорошее качество управления для большинства объектов промышленной технологии. Рассмотрим процедуру вывода алгоритма цифрового ПИД-
регулятора из соответствующего непрерывного закона, имеющего вид, где  - ошибка регулирования
- ошибка регулирования
(1)
Запишем уравнение (1) в конечных разностях, путем замены 
 , (2)
, (2)
где K=1,2,3...- номер периода квантования, TK - величина периода квантования.
Отметим, что при достаточно малых периодах квантования цифровой ПИД закон управления обеспечивает почти такое же качество процессов управления, что и исходный непрерывный закон (1).На практике вместо вычислений абсолютных значений управляющего сигнала удобней вычислять его приращения ∆U(k) на каждом такте. В этом случае становится возможным использовать этот алгоритм для управления объектами, оснащенными как пропорциональным так и интегрирующими исполнительными механизмами. В результате получаем так называемый скоростной алгоритм управления, полностью эквивалентный исходному
 (3)
(3)
Или, приведя подобные члены, получим
 (4)
(4)
где обозначено
 , (5)
, (5)
Структурная схема цифрового ПИД регулятора приведена на рис, где через  обозначен блок задержки сигнала на один период квантования.
обозначен блок задержки сигнала на один период квантования.
Рис. Структурная схема скоростного ПИД-регулятора. Алгоритм работы всей системы управления при использовании цифровой модели объекта будет иметь вид
При этом параметры цифровой модели объекта управления в координатах "вход - выход" находятся путем взятия модифицированного Z-преобразования от передаточной функции объекта первого порядка с запаздыванием, что приводит к следующим формулам
 , (6)
, (6)
где  , M- целая часть отношения,
, M- целая часть отношения,  - дробная часть.
- дробная часть.

17. Экстремальные регуляторы. Дайте определение регулятора, области его применения и виды регуляторов.
Экстремальным регулятором (или оптимизатором) называют автоматическое устройство, обеспечивающее отыскание и поддержание таких значений входных переменных у1, у2, ..., уn объекта управления, при которых его выходная переменная X достигает наибольшего или наименьшего (экстремального) значения. Такие регуляторы применяются в системах автоматической оптимизации (САО) работы отдельных агрегатов или технологических процессов в металлургическом производстве, например для оптимизации теплового режима методических печей при нагреве металла перед прокаткой, в системе управления нагревательного колодца и др. В отличие от обычных систем регулирования в системах САО не известно заданное значение регулируемой величины. Поэтому их задача принципиально сложнее и заключается в автоматическом поиске такого управляющего воздействия, которое обеспечивает максимум (минимум) регулируемой величины. Задача поиска экстремума разбивается на две части: 1) определение градиента или отклонений от точки экстремума (изучение объекта); 2) организация движения к точке экстремума. Для решения задачи поиска экстремума предложено большое число различных способов. Рассмотрим наиболее распространенные из них и соответствующие им структурные схемы экстремальных регуляторов.
Экстремальный регулятор с запоминанием экстремума
Этот регулятор реагирует на разность между наибольшим, достигнутым в предыдущие моменты времени, значением выходной величины и текущим значением X. Структурная схема экстремальной системы с запоминанием экстремума представлена на рис. Экстремальный регулятор ЭР включает в себя: запоминающее устройство ЗУ, фиксирующее только увеличение величины X; устройство реверса УР, представляющее собой сигнум-реле (реле знака изменения сигнала на выходе объекта управления); исполнительный механизм ИМ, воздействующий на входной сигнал у объекта управления ОУ. Выходная величина объекта X подается на запоминающее устройство регулятора и запоминается им, если происходит увеличение X при воздействии на объект управляющего воздействия у. Сигнал Х3 с запоминающего устройства непрерывно подается на элемент сравнения ЭС, где сравнивается с текущим значением сигнала X. Сигнал разности (X—Х3) с выхода элемента сравнения поступает на устройство реверса. При достижении этой разности значения, попадающего в зону нечувствительности сигнум-реле, последнее срабатывает и производит реверс исполнительного механизма, воздействующего на объект. При этом запомненное в предыдущий момент значение Х3 стирается и осуществляется запоминание нового текущего значения X.
Шаговый экстремальный регулятор
Шаговый регулятор изменяет управляющее воздействие у ступенчато. Первоначально производится принудительное изменение у в какую-нибудь сторону на некоторую величину шага у. Значение X в конце шага сравнивается с тем, которое было в начале.
Взависимости от знака разности этих значений определяется новое направление изменения у. Структурная схема шаговой экстремальной системы приведена на рис. Экстремальный регулятор ЭР включает в себя: элемент запоминания (запаздывания) e–pT, запоминающий значение выходной величины X объекта управления на бремя Т; сигнум-реле СР, осуществляющее реверс исполнительного механизма ИМ; два импульсных элемента ИЭ1 и ИЭ2, работающих синхронно.
Внастоящее время выпускаются следующие пневматические экстремальные регуляторы: АРС-2-О — запоминание экстремума (максимума или минимума); APG-1-OH — шаговый поиск максимума регулируемой переменной; АРС-2-ОИ — шаговый поиск максимума или минимума регулируемой переменной.
18.Адаптивные регуляторы. Дайте определение регулятора и поясните принципы действия самонастраивающихся систем (СНС) по отклонению и по
возмущению.
Многие технологические процессы и агрегаты в металлургии относятся к классу нестационарных с изменяющимися во времени динамическими характеристиками. Поэтому автоматические системы регулирования (АСР), в которых применяют регуляторы с фиксированными параметрами, не могут обеспечить высокое качество, а иногда даже и просто устойчивого управления. В связи с этим в последние годы при реализации АСР обращаются к принципу адаптивного управления, создавая самонастраивающиеся системы (СНС) с применением адаптивных регуляторов, выполненных на базе элементов и средств цифровой вычислительной техники. Принцип работы СНС заключается в следующем. Для системы задается некоторый функционал качества Q3, который в общем случае зависит от параметров системы и внешних воздействий. В процессе работы функционал качества изменяется при изменении входных воздействий и динамических характеристик объекта. Самонастройка сводится к решению двух основных задач: 1) стабилизации динамических или статических характеристик системы управления, т. е. обеспечения условия Q = Q3 или Q ≤ Q3 (Q – текущее значение функционала качества); 2) оптимизации динамических или статических характеристик системы управления, т. е. обеспечения условия Q = Qmin.
Отыскание оптимума функционала осуществляется путем поиска. При этом вектору управления или вектору перенастраиваемых параметров регулятора задается приращение и оценивается отклонение меры качества, в зависимости от которого осуществляется соответствующее изменение этих векторов. Самонастраивающиеся системы такого типа получили название, поисковых. Обычно на практике чаще используют беспоисковые СНС, в которых обеспечение условий Q = Q3 или Q = Qmin осуществляется на основе принципа управления по отклонению или возмущению с использованием эталонной модели основного контура управления, включающего в себя объект управления и регулятор с настраиваемыми параметрами. При номинальном режиме работы системы параметры объекта и настроечные параметры регулятора обеспечивают близость динамических характеристик основного контура к характеристикам эталонной модели. При отклонении параметров объекта от номинальных необходимо перестроить параметры регулятора так, чтобы динамические характеристики основного контура совпали с характеристиками эталонной модели. В бесиоисковых СНС управление настройкой параметров усложнено по сравнению с несамонастраивающимися системами управления. Это обусловлено трудностями создания датчиков параметрических отклонений.
СНС по отклонению. Кроме основного контура (ОУ, Р), данная схема содержит эталонную модель системы ЭМС и вычислительное устройство ВУ, которое на основании информации о входных воздействиях g и f, выходных координат модели хм и объекта X, а также заданного значения регулируемой величины Х0 вычисляет значения, составляющих вектор v, настраиваемых параметров регулятора Р. Адаптация в данной системе осуществляется с помощью замкнутого контура обратной связи. Применение при этом компенсационных сигналов по внешним возмущающим воздействиям обеспечивает повышение качества адаптации.
СНС по возмущению. Данная система состоит из основного контура, блока оценки параметров объекта управления БОП и блока настройки параметров регулятора БНП. Управление в такой системе осуществляется на основе беспоисковой оценки параметров объекта ОУ и настройки регулятора по разомкнутому циклу. Этот тип адаптивных систем особенно эффективен, если удается выделить один технологический параметр, от которого зависят все настраиваемые параметры регулятора.

19. Основные представители регуляторов аппаратного типа, входящие в состав агрегатных комплексов АКЭСР, Каскад-2, Контур-2, МикроДАТ.
АППАРАТНЫЕ регуляторы - представляют собой автономные регулирующие приборы, воспринимающие сигналы непосредственно от датчиков и реализующие заданный закон регулирования и передающие на исполнительное устройство полученные управляющие воздействия. Эти регуляторы применяются во всех областях промышленности, особенно в химической. В их состав входят следующие комплексы регулирующих и функциональных блоков: регуляторы в системе КАСКАД (рассчитанные на работу с отечественными измерительными приборами, с унифицированными выходными сигналами постоянного тока 0-5мА, 0-20мА и электрическим исполнительных механизмом МЭО-5 и МЭК-К). В систему КАСКАД входят измерительные, алгебраические, нелинейные и регулирующие блоки; задающие, усилительные и вспомогательные блоки; блоки управления, пусковые и измерительные устройства, блок указателей и исполнительных механизмов и др. АК (агрегатный комплекс) КАСКАД построен на микроэлектронной основе и наиболее эффективен когда к точности регулирования предъявляются повышенные требования (погрешность <1%) и приходится сталкиваться с многосвязными АСР или разветвленными САУ, с многократным использованием сигнала датчика. Комплекс используется для регулирования любых параметров, преобразованных в унифицированный сигнал. Состав и регуляторы АК КАСКАД: АК построен на транзисторной электрической унифицированной системе приборов. АР применяют для процессов с временем протекания 0,2-2000с. Основные блоки: Р12, Р17, Р-21, Р-27, Р-28. АКЭСР (с возможностью связи с ЭВМ) – на базе АК может быть построены разнообразные АСР и САУ, от простых контуров до самых сложных многоуровневых АСУТП, с различными вычислительными и логическими блоками, способными работать самостоятельно, либо взаимодействовать с параллельноили вышестоящими уровнями управления, выполненных на базе других АК ГСП (МикроДАТ, АСКР-ЭЦ).
АК МикроДАТ – это микропроцессорный комплекс средств диспетчеризации, автоматики и телемеханики. Является продолжением развития КТС ЛИУС-2. Использование в локальных системах нижнего уровня иерархической АСУ ТП (осуществляет сбор, хранение и первичную обработку информации, непосредственное цифровое управление, ручной ввод и отображение технологической информации, проводит обмен информации между территориально-рассредоточенными и удаленными подсистемами, включая ЭВМ). На базе АК МикроДАТ создаются проблемно-ориентированные системы управления, которые не требуют внешнего программирования. В таких системах настройка на задачу конкретного пользователя производится на конкретную задачу на технологическом языке, максимально приближенном к языку оперативного персонала.
20. Поясните принцип действия измерительного блока ИО4 и релейного регулирующего блока Р21, входящих в агрегатный комплекс Каскад.
Измерительный блок И04 предназначен для приема до четырех входных сигналов постоянного тока и гальванической развязки входного сигнала для исключения влияния на него сигналов последующей обработки. Выходной сигнал формируется в виде напряжения постоянного тока и рассчитан На подачу в аналоговые Р12 или релейные Р21 регулирующие блоки. На рис. приведена структурная схема измерительного блока И04. Преобразователи 1 служат для преобразования сигнала постоянного тока в переменный, для гальванической развязки с помощью трансформатора и затем обратного преобразования переменного тока в постоянный. Узлы масштабирования 2 отбирают нужную долю сигнала с соответствующего канала. Задающее устройство 3 дискретно и плавно с помощью узла 4 изменяет диапазон действия внешнего задатчика. В узле сравнения 5 формируется сигнал рассогласования задатчика и первичных измерительных преобразователей. С помощью корректора 6 в измерительном блоке устанавливается заданное значение регулирующего параметра в диапазоне 0—100%. В состав И04 входят источник питания 7, генератор 8, преобразующий постоянный ток в прямоугольные импульсы частотой около 10 кГц и обеспечивающий работу преобразователей 1.
В системе КАСКАД применяют аналоговый регулирующий блок Р12 и релейный регулирующий блок Р21. Выходной сигнал Р12 изменяется в диапазоне 0—5 мА. Прибор работает в комплекте с электропневматическими позиционерами и усилителями мощности. Релейный регулирующий блок Р21 предназначен для применения в автоматических регуляторах производственных процессов в комплекте с релейными усилителями мощности и электрическими исполнительными механизмами постоянной скорости. Выходной сигнал блока Р21 представляет собой последовательность импульсов напряжения 24 В с изменяющейся скважностью. Структурная схема этого блока приведена на рис. 1. Выходные сигналы постоянного тока 0—5; 0—20 мА; 0—2,5 В суммируются на входе демпфирующего устройства 1. Выход этого устройства вместе с сигналами постоянного тока 0—5 мД; 0—±24 В, а также с сигналами обратных связей, формирующих закон регулирования, поступает на вход высоко-омного двухполярного усилителя постоянного тока 6 (УВ-41). Выходной сигнал усилителя УВ-41 управляет трехпозиционным релейным магнитно-тиристорным усилителем 5 (УР-2), который коммутирует цепь исполнительного механизма постоянной скорости. Усилители УВ-41 и УР-2 питаются от модуля источника питания 7 (ИП-15), подключенного к сети. Зона нечувствительности блока Р21 регулируется путем изменения коэффициента усиления звена 2 в цепи отрицательной обратной связи усилителя УВ-41. Закон регулирования формируется цепью главной отрицательной обратной связи, выполненной в виде нелинейного инерционного звена 3. Используется дополнительная обратная связь 4 в виде инерционного звена, которая влияет на длительность отдельных включений в пульсирующем режиме.
21. Поясните принцип действия аналогового регулирующего блока Р12.
Блок предназначен для формирования П-, ПИ- и ПИД-законов регулирования и двустороннего ограничения уровня выходного сигнала. Он может применяться в качестве самостоятельного регулирующего устройства для управления позиционерами или усилителями мощности исполнительных устройств или как корректирующее регулирующее устройство в каскадных схемах регулирования. Входные сигналы вводятся в регулирующий блок непосредственно без масштабирования и без гальванической изоляции или через измерительный блок ИО4. Переключение выходных цепей регулирующего блока с автоматического управления на ручное и обратно осуществляется с помо-
щью выносного блока управления БУ12. Структурная схема блока Р12 показана на рис. Узел входных цепей 1 воспринимает сигналы токовых датчиков IД или датчиков постоянного напряжения UД и компенсирует их сигналом задающего устройства с токовым входом IЗУ, формируя сигнал
рассогласования UВХ. Кроме того, при ручном управлении нагрузкой на узел 1 подается сигнал от блока управления IБУ. Все токовые сигналы преобразуются в сигналы напряжения. Усилитель постоянного тока 2 воспринимает разность между сигналами рассогласования UВХ и сигналом обратной связи UОC и усиливает ее с коэффициентом усиления K2 Модуль динамики 3 содержит RC-цепи (цепи функциональной обратной связи), обеспечивающий безударное переключение с ручного управления на автоматическое. Модуль 4 воспринимает выходной токовый сигнал усилителя 2 преобразуя этот сигнал в напряжение и передает его на рабочем активном участке своей характеристики с коэффициентом K4 = 1. Усилитель постоянного тока 6 воспринимает сигнал с выхода модуля ограничения. Усилитель охвачен 100% жесткой обратной связью и передает сигнал на основной токовый выход с крутизной S6 = 1мА/В, а на дополнительный выход напряжение с коэффициентом K6 = 1. Источник питания 5 питается от сети переменного тока 50 Гц,
22. Усилители. Назначение, классификация и основные характеристики.
Электронным усилителем называют устройство, позволяющее повысить мощность входного электрического сигнала за счет энергии источника питания усилителя с помощью усилительных элементов (транзисторов, операционных усилителей и т.п.) при заданном уровне искажений. Электронные усилители являются одними из наиболее важных и широко используемых устройств в системах передачи и обработки различной информации, представленной с помощью электрических сигналов. Высокая чувствительность, быстродействие, компактность, экономичность электронных усилителей обусловили их широкое применение в измерительной технике, электро- и радиосвязи, автоматике, вычислительной технике и т.п.
В зависимости от назначения усилители подразделяются так: усилители постоянного тока (УПТ), усилители низкой частоты (УНЧ), усилители высокой частоты (УВЧ), избирательные усилители, широкополосные (видеоусилители), импульсные, операционные и т.д.
Операционные усилители относятся к классу многофункциональных, или универсальных, так как с их помощью можно реализовать практически любой вид усиления электрического сигнала. В настоящее время основным элементом электронного усилительного устройства является транзистор.

23. Реле. Назначение, классификация, характеристики электромагнитных реле.
Реле - это элемент автоматики, у которого при плавном изменении входной величины происходит скачкообразное изменение выходной величины. По принципу действия наиболее распространенными являются электромагнитные реле. Основной частью электромагнитного реле, представленного на рис, является электромагнит - преобразователь энергии электрического тока в механическое перемещение. Он состоит из обмотки 1 с сердечником 2, ярма 3 и подвижной части, называемой якорем 4. При прохождении электрического тока по обмотке якорь притягивается к сердечнику и воздействует на контактные пружины 5. При этом контакты 6 замыкаются. Это явление называется срабатыванием реле. При исчезновении тока якорь возвращается в исходное состояние, размыкая контакты.
По роду питающего тока электромагнитные реле подразделяются на реле постоянного и переменного тока.
По надежности действия реле подразделяют на реле первого класса и реле низших классов. Электромагнитные реле постоянного тока подразделяют на нейтральные, поляризованные, импульсные и комбинированные реле.
Основные характеристики реле: К основным характеристикам электромагнитных реле относят сопротивление обмоток катушек реле, напряжение (ток) притя-
жения якоря, напряжение (ток) отпускания якоря, время замедления на отпускание и время замедления на притяжение якоря реле. Напряжение (ток), при кото-
ром притягивается якорь реле и замыкаются фронтовые контакты, называется напряжением (током) притяжения. Напряжение и ток, при котором происходит отпускание якоря реле и замыкаются тыловые контакты, называется напряжением (током) отпускания. Отношение напряжения (тока) отпускания к напряжению (току) срабатывания характеризует коэффициент возврата реле: KÂ UO /UÑÐ IO / IÑÐ или. Также реле характеризует и коэффициент запаса по току - от-
ношение рабочего тока к току притяжения KÂ I ÐÀÁ / I ÏÐ .
Для большинства реле, используемых в устройствах СЦБ, коэффициент возврата находится в пределах от 0,25 до 0,5. Для временных характеристик реле применяются параметры: время притяжения; время отпускания. В зависимости от времени срабатывания реле различают следующие виды реле: быстродействующие, (со временем замедления на притяжение и отпускание до 0,03 с); нормальнодействующие (0,15 ... 0,20 с); медленнодействующие (1,0 ... 1,5 с); временные (более 1,5 с).
24. Достоинства электрических и электронных ТСА с точки зрения современных принципов бесщитового распределенного управления.
Современные системы автоматического контроля, регулирования и управления создаются из разнообразных технических средств автоматизации (ТСА), предназначенных для получения, обработки и преобразования информации, формирования и передачи управляющих воздействий на объекты управления, обеспечивающих требуемый режим работы последних. Разработка и внедрение в эксплуатацию систем автоматизации не возможна без правильного выбора и требуемых условий эксплуатации ТСА.
Прошло уже примерно 15-18 лет, как методология распределенного бесщиткового управления активно начала внедряться в автоматизированное управление технологическими процессами в различных отраслях промышленности. Более активно это происходит в нефтеперерабатывающей, химической, строительной, внедряются самые современные технические средства автоматизации на основе использования мини- и микро-ЭВМ, а также на быстрое развитие робототехники и гибких производственных систем.
Применение современных средств и систем автоматизации позволяет решать следующие задачи:
- вести процесс с производительностью, максимально достижимой для данных производительных сил, автоматически учитывая непрерывные изменения технологических параметров, свойств исходных материалов и полуфабрикатов, изменений в окружающей среде, ошибки операторов; - управлять процессом, постоянно учитывая динамику производственного плана для номенклатуры выпускаемой продукции путем оперативной перестройки режимов технологического оборудования, перераспределения работ на однотипном оборудовании и т. П.; - автоматически управлять процессами в условиях, вредных или опасных для человека.
Широкое внедрение систем автоматизации приносит промышленности кроме прямого экономического эффекта существенный организационный эффект, так как требует специалистов высокой квалификации, и, следовательно, повышает общий уровень организации производства (уменьшает степень неупорядоченности) и его культуры, улучшает стиль и эффективность руководства и т.д. Уровень механизации и автоматизации производственных процессов сегодня является одним из важнейших показателей научнотехнического прогресса в стране.
25. Каким образом достигаются желаемые динамические характеристики (алгоритмы) в структурах автоматических регуляторов (аналоговых и дискретных) с типовыми алгоритмами регулирования.
Как достигаются желаемые динамические характеристики (алгоритмы) в структурах АР. Структурные схемы АР (аналоговые и дискретные) с типовыми алгоритмами могут быть получены на основе известных в ТАУ методов коррекции, когда желаемые динамические характеристики (алгоритмы) достигаются с помощью последовательных и параллельных корректирующих цепей (активных и пассивных) и обратных связей. В ряде случаев ИМ так же участвует в формировании регулирующего сигнала.
26. Программируемые микропроцессорные контроллеры (ПМК). Их назначение, отличие от мини и микро ЭВМ, классификация. Регулирующий контроллер Ремиконт (назначение и его основные особенности).
Программируемый микропроцессорный контроллер (ПМК) выполняет функции преобразования, обработки, хранения информации и выработки команд управления и является по сути специализированной управляющей микроЭВМ для работы в локальных и распределенных системах управления в реальном времени в соответствии с фиксированным набором рабочих программ, размещенных в ПЗУ и ОЗУ. По своему назначению - областям проблемной ориентации - ПМК бывают: 1) микроконтроллерами, предназначенными для замены устройств электроавтоматики на крупносерийном и массовом производстве релейных и логических схем, командных аппаратов; такие ПМК логического типа появились на базе развития и слияния средств вычислительной техники на МП. релейной бесконтактной автоматики и циклового программного управления технологическим оборудованием, и именно логические ПМК положили начало в ряду программируемых контроллеров; 2) микроконтроллерами регулирующего типа, предназначенными для замены аналоговых, импульсивных и цифровых регуляторов, обычно использовавшихся как основа средств автоматического регулирования. 3) микроконтроллерами координирующего типа, предназначенными для реализации функций программных задатчиков, специальных алгоритмов логико-командного управления периферийными устройствами, функций координирующей микроЭВМ в распределенных АСУ ТП (ведущий контроллер).
Основные особенности ПМК, отличающие их от управляющих мини-и микроЭВМ: проблемно-ориентированное программное обеспечение на конкретную задачу или набор задач; схожесть физической структуры ПМК различных назначений; программирование ПМК в процессе их изготовления, а возможное изменение программы работы, настройка, реконфигурация и т.п. осуществляются на пульте оператора клавишами, перемычками, как в обычных аналоговых устройствах автоматики; ПМК предназначены для эксплуатации в непосредственной близости от технологического оборудования, поэтому в ПМК обеспечивается необходимая защита от промышленных помех, гальваническая развязка от внешних цепей оптронами, ферритовыми трансформаторами; модульная структура ПМК, позволяющая наращивать память ПМК, изменять число входов и выходов и т.п.; меньший объем памяти и меньшее число электронных блоков
всоставе ПМК по сравнению с микроЭВМ; наличие сканирующих (коммутирующих) устройств для поочередного вопроса входов и выходов ПМК. К настоящему времени промышленностью выпускается ряд серий Ремиконтов (Р-100, Р-1Щ Р-112, Р-120, Р-122, Р-130, РК-131, Р-200+215,КР-300. Эти контроллеры предназначены для построения многоканальных систем регулирования с выполнением функций стабилизации, экстремального и многосвязанного регулирования. Требуемый алгоритм регулирования, его параметры, связи с внешней аппаратурой набираются оператором с помощью клавиатуры, снабженной общепринятыми
впрактике автоматизации терминами и символами. Представление информации оператору производится при помощи светодиодных и цифровых индикаторов. В комплекс ПМК серии 110 и 120 входят также диалоговые дисплейные контроллеры Димиконт Д-120 - многофункциональный пульт управления оператора, который может обслуживать системы автоматического регулирования, содержащие до 8-ми Ремиконтов. Назначение его - для конфигурирования Ремиконтов, регистрации реальной конфигурации Ремиконтов, для информационного обеспечения динамической наладки контуров регулирования, контроля и регистрации параметров технологического процесса, оперативного управления процессом. Контроллеры РК-131 ориентированы на решение задач автоматизации технологических объектов различной сложности и обеспечивают регулирование, логическое управление, сбор информации, регистрацию и архивациюОсобенностью Ремиконта является внутреннее программное обеспечение, не требующее внешних программных средств операционных систем, транслятора, ассемблера и т.п.
Другой важной особенностью Ремиконта является программная реализация типового состава функций для систем автоматического управления локального уровня и подсистем АСУ ТП. Типовой состав функций Ремиконта включает 25 алгоритмов регулирования: аналоговые и импульсивные стандартные ПИД-алгоритмы, ПИД-алгоритмы с нуль-органом, с дифференцированием, с автоподстройкой; динамические преобразователи (дифференцирование, интегрирование, слежение, программное задание); нелинейные преобразования (формирование кусочно-линейных функций, булевых функций, селектирование) и другие функции.

27. ПМК логического типа Ломиконт. Физическая структура, назначение и область применения. Сходство и различие Ломиконтов и Ремиконтов.
Ломиконты представляют собой программируемые МП устройства управления, архитектура которых оптимизирована для решения задач автоматического управления тех. процессами. Это многоцелевые контроллеры промышленного назначения. Предназначены для автоматического регулирования технологическими процессами в энергетической, металлургической, химической и других отраслях промышленности. Ломиконты обрабатывают дискретные, аналоговые, и импульсные входные сигналы, формируют дискретные, аналоговые, и импульсные выходные сигналы, выполняют операции управления логики, имеют таймеры и счетчики, осуществляют сложную обработку аналоговых сигналов, ПИ- ПИД-регулирование с автоподстройкой и без. Выводит текущие значения параметров на печать. Ломиконты могут быть объединены в ЛВС. По функциям все модели Ломиконтов одинаковы, различаются лишь по числу каналов ввода/ вывода. Л110 иЛ112 – большое число каналов (50-800), Л120 и Л122 (≤90)– малое число каналов. Ломиконт - устройства того же класса, что и Ремиконт. Они построены по единой элементной базе, имеющую аналогичную физическую структуру, в основном общий состав, конструктивные элементы и исполнение. Часть модулей Ломиконта и Ремиконта являются взаимозаменяемыми. Отличия контроллеров обусловлены, главным образом, их ориентацией на разные классы задач. Ремиконта предназначен для построения систем регулирования, а Ломиконта - для управления, поэтому контроллеры имеют различную пользовательскую архитектуру, используют различные методы программирования. Центральным понятием Ремиконта является алгоблок, функциональная структура - набор алгоблолков. Программа пользователя Ломиконта задается на языке Микроле.
1- микропроцессорный вычислитель; 2- память программы пользователя; 3-средства оперативного управления; 4- устройство питания и переключения; 5- модули цифровой связи; 6- устройства связи с объектом (УСО); 7 - каркас и внутренняя магистраль, а также облучатель ультрафиолетовый и конструктивные элементы.
Микропроцессорный вычислитель (МВ)В состав МВ входят модули: ПРЦ5 - модуль процессора, ПЗУ2 - модуль постоянного запоминающего устройства (ЗУ); ОЗУ4 - модуль оперативного ЗУ. Модуль ПРЦ5 предназначен для обработки информации в соответствии с ПО Ломиконта. Модуль ПРЦ5 построен на базе микропроцессора КР580ИК80, других микросхем серии КР580 и К155.В ПЗУ2 содержится системное ПО контроллера объемом 32 Кбайт, включающее программу-диспетчер, организующую всю работу контроллера, программы опроса входных модулей УСО и выдачи выходных сигналов, библиотеку алгоритмов, програм- му-интерпретатор, выполняющую обработку информации в соответствии с ПрП, программы обмена цифровой информацией с пультом и другими внешними устройствами, программы самоконтроля и самодиагностики, программы тестирования и т.д. Модуль ОЗУ4 емкостью 8 Кбайт, используемый в МВ, называется системной памятью Ломиконта. В модуле хранится оперативная информация о текущих значениях входов, выходов, таймеров, счетчиков, буфера для обмена с внешними устройствами, служебная информация и оперативная информация, необходимая для работы системного ПО Ломиконта. Для использования в качестве системной памяти Ломиконта модуль ОЗУ4 с помощью перемычек под пайку, находящихся на модуле, должен быть настроен на определенный адрес. Модуль ОЗУ4 системной памяти Ломиконта будем называть в дальнейшем ОЗУ4.7.
Для повышения надежности допускается резервирование, т.е. установка двух модулей ОЗУ4.7 ("основной" и "резервный"). При отключении сетевого питания информация в модуле ОЗУ4.7 сохраняется на батарейном питании (БСЭл).
Память программы пользователя (ПрП) Для хранения ПрП используются: ОЗУ4, МПП - модуль программируемой памяти с вставленными в него микромодулем перепрограммируемого запоминающего устройства (ППЗУ).
Для хранения ПрП при вводе и на этапе отладки используется один или два модуля ОЗУ4, настроенный с помощью перемычек под пайку на определенные адреса. Эти модули в дальнейшем будем называть: ОЗУ4.4 - основной оперативной памятью ПрП: ОЗУ4.5 - дополнительной оперативной памятью ПрП.
Устройства связи с объектом К устройствам связи с объектом относятся модули: ДЦП-2 -дискретно- цифрового преобразования: ЦДП2 - цифро-дискретного преобразования; АЦП2 - аналогоцифрового преобразования; ЦАП2 -цифро-аналогового преобразования: ИЦП2 - импульсно-цифрового преобразования; ЦИП2 - цифро-импульсного преобразования; РГ12 -гальванического разделения входной; РГ22 - гальванического разделения выходной. Модуль ЦИП2 - применяется, главным образом, для управления исполнительными механизмами постоянной скорости в АСР. Каждый импульсный выход представляет собой два транзисторных ключа, имеющих смысл "больше" и "меньше", контакты управляются в соответствии с результатом широтно-импульсной модуляции сигнала управления, получаемого на выходе алгоритма импульсного регулирования. ЦИП2 обслуживает 8 импульсных выходов. Модули ДЦ112, 1Щ112, ИЦ112 ЦИП2 содержат узлы гальванической развязки, а модули АЦП2 и ЦАП2 такой развязки не содержат. Каждый из модулей РГ12 и РГ22 осуществляет гальваническую развязку по восьми каналам. Для индикации
состояния входных и выходных дискретных и импульсных сигналов служит сервисное устройство индикатор дискретных сигналов.
Модули цифровой связи К ним относятся: МИС2 - модуль интерфейсной связи; МИП - модуль интерфейсный параллельный; МСК - модуль связи каркасов. МИС2 может осуществлять одновременно связь по четырем двухсторонним каналам ИРПС (интерфейс радиальный последовательный стандартный). Его можно использовать для связи с другими Ломиконтами и ЭВМ, для вывода технологических сообщений на дисплей, для цифровой связи при дублировании в моделях Л- 112 и Л-122. Модуль МИС2 можно использовать вместо модуля МУС2 для связи с пультом ломиконта.
Модуль МИП используется, главным образом, для вывода технических сообщений на печатающее устройство по интерфейсу ИРПР. На модуле МИП расположен один двухсторонний канал ИРПР. Связь дополнительного каркаса с каркасом, в котором находится вычислитель, осуществляется с помощью модуля МСК.
28. Общие сведенья об исполнительных устройствах (ИУ)и механизмах (ИМ). Классификация электрических ИМ, основы устройства и области и применения ИМ позиционных и постоянной скорости.
ИМ и ИУ промышленных систем автоматизации входят в IV функциональную группу ГСП в соответствии с ГОСТ 12997-84 группу устройств использования командной информации в целях воздействия на процесс и для связи с оператором. Термины ИМ и ИУ иногда понимают как синонимы. ИМ бывают: пневматические, гидравлические, электрические. ИУ включает в себя ИМ, РО, блок обратной связи, блок усиления, фиксатор положения и др. Электрические ИМ. Классификация. Электрические: электродвигатели (прямоходные, поворотные, ИМ позиционного типа, ИМ постоянной скорости, ИМ переменной скорости, усилители мощности), электромагнитные. Выбег - перемещение выходного органа ИМ после выключения двигателя. Люфт - образуется свободным ходом выходного органа при неподвижном вале электродвигателя из-за зазора в зацеплении узлов редуктора. Гистерезис - между положением выходного органа и сигналом датчика положения складывается из люфта механической передачи и вариации показания датчика. Импульсная характеристика – средняя функция скорости рабочего органа. Время полного хода. Номинальный момент.
Позиционные ЭИУ предназначены для установки РО в определенное фиксированной положение, чаще всего таких положений два ‘открыто/закрыто’. Хотя возможно построение и многопозиционных ЭИУ. Например, с помощью шагового двигателя. Конструктивно ЭИУ представляют собой электродвигатель, который через понижающий редуктор соединен с РО, и конечные выключатели, которые позволяют остановить РО в нужном положении.
ЭИУ постоянной скорости являются силовыми установками пропорционального действия. РО с помощью таких ЭИУ устанавливается в любое промежуточное положение, в зависимостити от величины и длительности управляющего сигнала. Частота вращения выходного органа постоянна, что позволяем использовать ШИМ. К таким ЭИУ относятся однооборотные (МЭО), многооборотные (ИМТ, МЭМ), прямоходные (МЭП). Особенность этих двигателей – высокая частота включений, до 1200 вкл./час. Содержат ИМ, блок усиления, блок сигнализации, фиксатор положения

29.Унифицированная система элементов промышленной пневмоавтоматики (УСЭППА) и функциональная система приборов «Старт» (основы устройства ПИ- и ПИДрегуляторов).
В УСЭППА входит сравнительно немного элементов, обеспечивающих: запоминание, сравнение, суммирование и др. Эти элементы и собранные из них более сложные блоки используются для создания различных функциональных приборов. Основными деталями элементов УСЭППА являются различные мембраны, пневмоконтакты типа «сопло-заслонка», пневмосопротивления (регулируемые и нерегулируемые) – выполненные в виде соответствующих дросселей, а также глухие и проточные камеры.
Аппаратура системы «Старт» выпускается на базе стандартных элементов УСЭППА. Основную группу приборов системы составляют самонастраивающиеся (экстремальные) регуляторы, а также регуляторы, которые формируют следующие законы регулирования: пропорциональный, пропорционально-интегральный, про-порционально-интегрально-дифференциальный и позиционный.
Пропорционально-интегральный регулятор ПР3.21
Регулятор ПР3.21 предназначен для получения непрерывного регулирующего воздействия в виде давления сжатого воздуха в соответствии с пропорциональным или пропорционально-интегральным законами регулирования при отклонении управляемой величины от заданного значения в соответствии с уравнением:
где P – текущее значение давления сжатого воздуха; P – давление, соответствующее заданному значению регу-
|
1 |
|
1 |
|
ВХ |
З |
|
|
лируемой величины; PВЫХ – давление на выходе регулятора; ТИ – время интегрирования. |
||||
PÂÛÕ |
|
(PÂÕ PÇ) |
|
(PÂÕ PÇ)d , |
||
|
T |
Действие регулятора основано на сравнении давлений сжатого воздуха, пропорциональных текущему и заданному |
||||
|
|
|
È |
0 |
||
значениям регулируемой величины. При рассогласовании этих сигналов возникают силы, действующие на мембраны элемента сравнения регулятора, которые уравновешиваются силами, развиваемыми давлением воздуха на мембраны отрицательной и положительной обратных связей. Изменяя посредством регулируемых дросселей степень воздействия этих обратных связей, устанавливают необходимые значения параметров настройки регулятора и меняют действие его пропорциональной и интегральной составляющих.
Регулятор ПР3.21 состоит из элементов сравнения 1, 2 и 7, дроссельного сумматора 3, усилителя мощности 4, выключающего реле 5, емкости 6, постоянного дросселя ПД2 и регулируемого дросселя 9. Элементы 1-4 формируют пропорциональную составляющую, а элемент 7, емкость 6 и дроссель 9 — интегральную составляющую регулирующего воздействия регулятора.
Рис. Принципиальная сх. ПИрегулятора ПР3.21
Пропорционально-интегральный регулятор с линейной статической характеристикой ПР3.31
Регулятор ПР3.31 отличается от регулятора П.Р3.21 наличием двух органов настройки предела пропорциональности δ в диапазоне 2…3000%, что значительно повышает ее плавность. Регулятор состоит из пятимембранного 1 и трехмембранного 4 элементов сравнения, повторителя-усилителя мощности 5, повторителя 7, переменных дросселей 2, 3 и 9, постоянных дросселей ПД1—ПД7, емкости 8 и выключающих реле 6 и 10.
Введение дроссельных сумматоров в прямой канал и линию отрицательной обратной связи усилителя 4 практически обеспечивает линейность статических характеристик. Рис. Принципиальная сх. ПИ-регулятора с линейной статической характеристикой ПР3.31
Пропорционально-интегрально-дифференциальный регулятор ПР3.25
Регулятор ПР3.25 выполнен на основе ПИ-регулятора ПР3.21. Он выпускается в комплекте с прибором прямого предварения ПФ2.1, который обеспечивает введение в закон регулирования воздействия по производной отклонения регулируемой величины от заданного значения. Обычно этот прибор включается последовательно с П- или ПИ-регулятором для формирования ПДили ПИДзаконов (операция предварения). Регулятор ПР3.25 реализует ПИД-закон регулирования:
1 |
1 |
|
dP |
|
|||
PÂÛÕ |
|
(PÂÕ PÇ) |
|
(PÂÕ PÇ)d TÄ |
ÂÕ |
, |
|
|
T |
d |
|
||||
|
|
È |
0 |
|
|
|
|
Рис. Принципиальная схема ПИД-регулятора ПР3.25: |
|||||||
1, 5, 9, |
10 – элементы сравнения; 2, 8 – пневмоемкости; 3, 6, 13 – переменные дроссели; 4, 7, 12 |
||||||
—пневмореле; 11 — усилитель мощности; ПД1 — ПДЗ — постоянные дроссели
30.Общие принципы построения гидравлических регуляторов. Принципиальные и структурные схемы серийных П- и И- регуляторов гидроавтома-
тики, их статические и динамические характеристики, области применения.
Гидравлический регулятор, регулятор, в котором энергия давления жидкости, подводимой от постороннего источника, воздействует на регулирующий орган. Г. р. обычно реализуют только интегральный, пропорциональный и интегрально-пропорциональный законы регулирования. Воспринимающим (чувствительным) элементом Г. р. служат мембранные, сильфонные и др. устройства, преобразующие измеряемую величину в пропорциональное усилие (реже — перемещение). В Г.р. чаще всего применяют гидравлические исполнительные механизмы, построенные на базе гидроцилиндров двустороннего действия. В относительно простых Г. р. используют мембранные исполнительные механизмы одностороннего действия. Достоинства Г.р. — надѐжность, простота конструкции и обслуживания, незначительная масса и габариты. Основной недостаток— необходимость постоянного контроля утечки рабочей жидкости.
Для автоматизации химических объектов применяют гидравлические регуляторы, которые реализуют П-, И-, ПИ-законы регулирования. Рассмотрим конструкции этих регуляторов.Наиболее простую конструкцию имеет И-регулятор (рис. 2.72).От датчика поступает регулируемый параметр Х на мембранное измерительное устройство 1. Мембрана 2 через толкатель 3 воздействует на струйную трубку 4. При изменении давления Х мембрана с толкателем перемещают трубку 4 к одному из приемных сопел, создавая тем самым разность давлений в приемных соплах и в рабочих полостях исполнительного механизма 5. ИМ через шток 6 перемещает затвор регулирующего органа. Параметром настройки регулятора служат переменный дроссель 7, который позволяет изменять давление рабочей жидкости в ИМ. Переменным дросселем 7 можно изменять постоянную интегрирования Ти. Гидравлические И-регуляторы применяют для стабилизации параметров малоинерционных промышленных объектов с небольшими значениями времени запаздывания.Для реализации пропорционального закона регулирования используют механическую или гидравлическую отрицательною обратную связь.
П-регулятор с механической обратной связью располагают вместе с исполнительным механизмом. Его принципиальная схема представлена на рис. 2.73. На выходном штоке исполнительного механизма 1 закреплено лекало 2 с роликом 8 и пружиной обратной связи 4, Перемещение 5 штока ИМ вызывает изменение положения ролика, вследствие этого изме-
няется усилие пружины 4, передаваемое через корректор 5 на струйную трубку 6. Изменение усилия пружины прямо пропорционально перемещению штока ИМ и положению корректора 5.
Динамика реального гидравлического П-регулятора с жесткой механической или гидравлической обратной связью описывается передаточной функцией апериодического звена.Коэффициент передачи регулятора Кр можно изменять корректором 5, положение штифта которого определяет значение
Kp. Следует отметить, что гидравлические П-регуляторы применяют реже, чем И- и ПИ-регуляторы.