

TAU
.pdfВопросы по ТАУ
1. Звено направленного действия |
|
|
|
2. Передаточная функция звена |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
âõ. õ |
y=f (x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m – масса груза; c – жесткость пружины; b – коэф. |
||||||||||||||||||||||
|
|
âûõ. y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
- это звено, передающее воздействие только в одном направлении от входа к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вязкого трения; F – внешняя сила; y – отклонение груза |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
от состояния равновесия. |
|
|
|
||||||||||||||||||||||||||
выходу. Математическая модель звена не зависит от математических моделей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Математическая модель такой динамической системы |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
других звеньев. |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
представляет собой ДУ 2-го порядка: my by cy F |
|||||||||||||||||||||||
Математическая модель всей САУ может быть получена как совокупность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
0 |
Задача состоит в нахождении передаточной ф-ции по |
|||||||||||||||||||||||||||||
математических моделей отдельных звеньев, образующих САУ, дополненных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
заданному ДУ. m |
|
|
|
|
b |
1 |
|
|
|||||||||||||||||||
уравнениями связей между звеньями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
В результате разбиения САУ на звенья направленного действия и получения |
|
m |
|
|
|
|
|
b |
|
|
|
1 |
|
|
|
|
|
|
|
|
c |
|
y |
c |
y y |
c |
F |
||||||||||||||||
математического описания звеньев, составляется математическая модель САУ, |
|
T1; |
T2 ; |
|
k |
Оператор Лапласа: |
|
d |
p |
|
|
|
|||||||||||||||||||||||||||||||
которая называется структурной схемой САУ. |
|
с |
с |
с |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
С учетом принятых обозначений уравнение примет вид: (T1p2+T2p+1)y=kF |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
=> y W ( p) F => |
|
|
|
|
|
|
y |
|
|
k |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
y |
T1 p2 T2 p 1 |
|
F |
|
|
|
|
|
|
|
W ( p) |
F |
|
T1 p 2 T2 p 1 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Передаточная функция звена – это отношение выходного параметра к |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
входному, представленных в операторной форме. |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
W (p) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Передаточная функция звена – это другая форма записи математической |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
модели звена, эквивалентное дифференцированное уравнение. |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Передаточная функция звена также, как и дифференцированное уравнение |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
отражает динамические свойства звена. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
3. Переходные (временные) характеристики |
4. Частотные характеристики АЧХ. ФЧХ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
- реакция звена на выходе, вызванная подачей на его вход единичного |
Частотные характеристики описывают установившиеся вынужденные |
||||||||||||||||||||||||||||||||||||||||||
ступенчатого воздействия. |
|
|
|
колеанияна выходезвена, вызванные гармоническим воздействием на его |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
y(t) |
|
входе |
|
|
|
|
|
|
|
|
|
|
|
õ(t) |
|
|
|
|
|
|
|
|
|
y(t) |
||||||||||||
|
|
õ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
x(t) |
|
|
Единичное ступенчатое воздействие: |
x(t) = xmaxsinωt |
|
|
|
||||
|
|
y(t) = ymaxsin(ωt + φ) |
|
|
|||||||
1 |
|
|
|
0 |
при t 0 |
|
|
||||
|
|
1(t) |
|
|
T |
|
|
|
|||
|
|
|
|
при t 0 |
x |
|
|
|
|
||
|
|
|
|
1 |
|
|
|
f = 1/T; Гц |
|
||
|
|
|
|
|
|
|
|
|
|||
0 |
t |
Переходная (временная) характеристика h(t) – |
|
|
|
t |
ω = 2πf; рад/с(с-1) |
||||
|
|
|
|
|
|
||||||
y(t) |
|
выражение y(t) при условии, что x(t)=1(t). |
y |
f |
|
|
|
|
|||
k |
|
Переходная (временная) характеристика так же как |
|
|
t |
|
|
||||
|
и ДУ, так же как и передаточная ф-ция дает |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
исчерпывающее представление о динамических |
|
|
|
|
|
|
|||
0 |
t |
свойствах объекта. |
|
|
|
|
Амплитудная частотная характеристика |
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Àmax |
|
= ymax |
|
ωС – частота среза |
|
|
|
|
|
|
|
Àmax |
|
ω0 – резонансная частота |
|||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
max |
A×Õ |
АЧХ – зависимость отношения |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
амплитуды сигнала на выходе к |
|
|
|
|
|
|
|
|
|
|
|
амплитуде на входе от частоты |
|
|
|
|
|
|
|
0.05Àmax |
|
|
входного сигнала. |
||
|
|
|
|
|
|
|
ww |
|
|||
|
|
|
|
|
|
|
|
w |
|
||
|
|
|
|
|
|
|
|
0 |
|
c |
|
|
|
|
|
|
|
j |
|
|
|
Фазовая частотная характеристика |
|
|
|
|
|
|
|
|
|
w |
ФЧХ – зависимость фазы сигнала на |
||
|
|
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
выходе от частоты входного сигнала. |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
АЧХ и ФЧХ в совокупности дают |
|
|
|
|
|
|
|
|
|
|
|
исчерпывающее представление о |
|
|
|
|
|
|
|
|
|
|
|
динамических свойствах объекта. |
|
5. Амплитудно-фазовая частотная характеристика |
6. Логарифмические частотные характеристики |
||||||||||
A |
|
|
|
|
|
L, äÁ |
реальм ая характериртика |
|
ωСР – частота среза |
||
|
|
|
|
|
|
|
ωСОПР – частота сопряжения |
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
20lgk |
|
|
арен то тичеркая характериртика |
||
|
|
|
|
|
|
|
|
Асимтотическая ЛАХ – |
|||
Ai |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
идеализированная ЛАХ, |
|
|
|
|
|
|
|
|
ËÀÕ |
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
состоящая из ассимтот |
|
|
|
f |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
lgw |
|
(отрезки горизонтальных и |
||
j |
|
|
i |
|
|
|
|
|
|
||
|
|
A |
|
|
|
|
w |
w |
|
|
|
|
|
w |
i |
|
|
j |
|
ðî ï ð |
ðð |
|
наклонных прямых). |
j |
|
|
w |
|
|
lgw |
|
||||
|
|
|
|
|
|
|
|
||||
i |
|
|
|
|
i |
|
|
|
|
ЛАХ и ЛФХ в совокупности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
так же как и АЧХ и ФЧХ |
АФЧХ – годограф, построенный в полярной системе координат. Каждой точке |
|
ËÔÕ |
|
|
|
дают исчерпывающее |
|||||
|
|
|
|
|
представление о |
||||||
годографа соответствует определенное значение частоты. Длина вектора |
|
|
|
|
|
||||||
динамических свойствах объекта. |
|
|
|||||||||
годографа берется из ФЧХ, угол поворота вектора φ из ФЧХ. |
|
|
|||||||||
|
|
|
|
|
|
||||||
АФЧХ дает исчерпывающее представление о динамических свойствах объекта. |
|
|
|
|
|
|
|||||
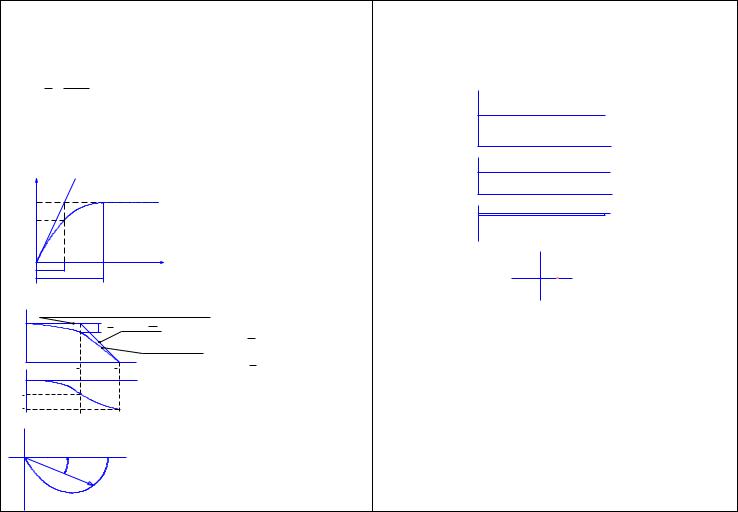
7. Апериодическое звено |
|
|
|
|
8. Идеальное усилительное звено |
||||
(Tp+1)y = kx (1), где х – входной параметр |
|
|
|
Харктеристики идеального усилительного звена могут быть получены их |
|||||
y – выходной параметр |
|
|
|
|
|
характеристики апериодического звена, при условии, что постоянная |
|||
k – коэффициент передачи |
|
|
|
|
времени Т = 0. |
|
|||
T – постоянная времени |
|
|
|
|
|
|
y = kx (1) |
||
p – оператор Лапласа |
|
|
|
|
|
|
W(p) = k |
||
W ( p) y |
k |
(2) – передаточная ф-ция звена. |
|
|
П ерехо дм ая (врен ем м ая) характ ерирт ика |
||||
|
|
h(t) |
|
||||||
x |
Tp 1 |
|
|
|
|
|
|
|
|
В установившемся статическом режиме (все производные равны 0, оператор |
k |
|
|||||||
Лапласа равен 0) входная и выходная величины будут равны yст = kxст (3) |
|
||||||||
|
|
||||||||
Переходная (временная) характеристика в результате решения уравнения (1), |
|
t |
|||||||
при условии, что х = 1(t) переходная характеристика h(t) = k(1 – e-t/T)(4) |
|
||||||||
График переходной характеристики имеет вид: |
|
|
|
L |
ËÀÕ |
||||
h(t) |
|
|
|
Располагая экспериментальной |
20lgk |
|
|||
|
|
|
переходной характеристикой можно |
|
|
||||
|
|
|
|
|
|
||||
k |
|
|
|
определить все параметры |
j |
lgw |
|||
|
|
|
|
||||||
|
|
|
апериодического звена. |
ËÔÕ |
|||||
|
|
|
|
|
|||||
0.632k |
|
|
|
|
|
|
|
|
lgw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ÀÔ×Õ |
T |
|
|
|
t |
|
|
|
|
|
tï ï |
=3T |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|||
Частотные характеристики апериодического звена: |
|
|
|
||||||
L, äÁ аррин т о т ичеркий(идеализиро вам м ый) ЛАХ |
ωС – частота среза |
|
|
||||||
20lgk |
|
äÁ |
H=- 20 |
äÁ |
ωО – частота сопряжения |
|
|
||
|
|
- 3äåê |
|
|
|
1 |
|
|
|
|
|
|
äåê |
|
|
|
|
||
ËÀÕ |
|
|
реальм ая ЛАХ |
0 |
T |
|
|
||
|
|
|
|
|
k |
|
|
||
|
1 |
k |
lgw |
C |
|
|
|
||
|
|
|
|
||||||
j |
w= |
w= |
|
|
T |
|
|
||
0 T |
C T |
lgw |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
-4p |
|
|
ËÔÕ |
|
|
|
|
|
|
-2p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ÀÔ×Õ |
|
|
АФЧХ имеет вид полуокружности |
|
|
||||
|
|
|
|
|
|||||
Ai |
j |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|

9. Колебательное звено |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10. Интегрирующее звено |
|
|
|
|
|||
Уравнение звена в операторной форме: (T12p2 + T2p + 1)y = kx (1) |
|
(Астотическое звено) |
|
|
|
|
||||||||||||||||||
T1, T2 – постоянные времени колебательного звена |
|
|
|
|
|
|
|
|
Чем дольше включен гидроцилиндр, тем дальше выдвенется шток. Чем |
|||||||||||||||
T1 и T2 связаны между собой условием: |
|
T2 |
1 |
(2) |
|
|
|
|
|
дольше включен мотор, тем больше оборотов он совершит. |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
py = kx |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для сохранения колебательности звена необходимо: ξ<1 |
|
|
|
|
|
y k xdt x0 |
|
|
|
|
||||||||||||||
Если ξ ≥ 1, то колебательное звено вырождается в апериодическое звено 2-го |
|
|
|
|
||||||||||||||||||||
порядка. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) = k/p |
|
|
|
|
||
|
|
k |
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) T12 p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) = kt |
|
|
|
|
|||
T2 p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
L,äÁ |
|
|
|
||||
С учетом формулы (2) и принимая Т = Т1 получим: |
W ( p) |
|
|
|
k |
(4) |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
20lgk |
|
äÁ |
ËÀÕ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T p 2 Тp 1 |
|
|
|
|
- 20äåê |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В установившемся статическом режиме входной и выходной сигналы будут |
k |
|
|
|
|
|||||||||||||||||||
связаны уравнением: yст = kxст (5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
lgw |
|||||
Переходная (временная) характеристика – это решение уравнения (1) для |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
w=1 |
|
w=k |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
случая, когда х = 1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
C |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ÀÔ×Õ |
|
|
lgw |
|||||
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
h(t) k 1 |
|
|
e t sin( t arctg ) (6) |
|
|
È |
p |
|
|
ËÔÕ |
|||||||||||
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
T2 |
|
|
|
|
|
4T1 |
T2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2T 2 |
|
|
|
|
|
|
|
|
2T 2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Представленные формулы позволяют провести построение переходной |
|
|
|
|
|
|
||||||||||||||||||
характеристики и по экспериментально полученной характеристике получить |
|
|
|
|
|
|||||||||||||||||||
основные параметры колебательного звена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
z=0.1 |
t |
|
|
|
|
|
2 |
- физический смысл – угловая |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
частота колебаний |
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
1 |
|
1 |
|
- характеризует затухание |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
D |
|
|
|
ln |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z=1 |
z=0.5 |
|
|
|
переходного процесса |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
2,3lg 2 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Частотные характеристики |
|
|
|
|
|
||||||||
L,äÁ |
z=0,1 |
|
z=0,5 аррин т о т ичеркая ЛАХ |
|
|
|
|
колебательного звена |
|
|
|
|
|
|
||||||||||
|
|
При ξ ≥ 1 колебательное звено |
|
|
|
|
|
|
||||||||||||||||
20lgk |
z=1 |
ËÀÕ |
|
|
|
|
|
становится апериодическим звеном 2- |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
го порядка. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
äÁ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
- 40äåê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
lgw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
j |
|
w0 =T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
lgw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
p |
|
|
|
ËÔÕ |
|
|
|
|
|
|
|
z=0,5 |
|
|
|
|
|
|
|
|
||||
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
- p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z=0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

11.Дифференцирующее звено |
|
|
|
|
|
|
12.Звено с постоянным запаздыванием |
|
|
Уравнение звена в дифференциальной форме: |
|
|
|
|
Уравнение звена во временной форме: |
|
|
||
|
dx |
(1) |
|
|
|
|
y(t) k x t |
|
(1) |
|
y k dt |
|
|
|
|
|
где: τ – время запаздывания. |
|
|
|
|
I C dU ; |
|
|
|
||||
Примеры: 1) Конденсатор, емкостью C: |
|
y k x e p |
|
(2) |
|||||
|
|
|
dt |
|
|
|
Передаточная функция звена с постоянным запаздыванием: |
||
|
|
|
|
|
dI |
|
|||
2) Катушка, с индуктивностью L: |
|
U |
L |
; |
W ( p) k e p |
(3) |
|||
|
|
|
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
3) Тахогенератор: |
E k d . |
|
|
|
|
|
|
||
|
|
dt |
|
|
|
|
|
|
|
где: α – угол поворота ротора тахогенератора; E – ЭДС. |
|
|
|
|
|
|
|||
Уравнение звена в операторной форме: |
|
|
|
|
|
|
|
|
|
|
y k p x |
(2) |
|
|
|
|
|
|
|
Передаточная функция дифференцирующего звена имеет вид: |
|
|
|
||||||
|
W ( p) k p (3) |
|
|
|
|
|
|
||
Переходная (временная) характеристика: |
|
|
|
|
|
|
|
|
|
|
h(t) k (t) |
|
|
|
|
|
|
||

13. Одноконтурная САУ
где: x – выходная величина (координата); f – возмущение (помеха); q – задающее воздействие; xос – сигнал обратной связи; ε – ошибка управления (погрешность).
q xос
Передаточная функция по каналу помехи.
С учетом выражения для передаточной функции звена с отрицательной обратной связью:
X f |
W2 ( p) |
f |
где: |
1 Wраз ( p) |
|
Wраз ( p) W1 ( p) W2 ( p) W3 ( p)
Вывод: Замкнутая система управления снижает воздействие помехи на выходной сигнал в [1 + Wраз(p)] – раз.
Передаточная функция по каналу управляющего воздействия.
X q |
|
|
W1 ( p) W2 ( p) |
|
q |
|
W1 ( p) W2 ( p) W3 |
|
|||
|
1 |
( p) |
|||
Вывод: Введение контура обратной связи снижает эффективность управляющего воздействия в [1 + Wраз(p)] – раз.
Передаточная функция по каналу ошибки регулирования (ε).
|
|
|
X ос |
|
|
W |
( p) |
q где: |
||||||
|
|
|
|
Wраз ( p) |
||||||||||
|
|
|
|
|
1 |
|
|
|||||||
|
|
W |
W1 ( p) W2 ( p) W3 ( p) Wраз ( p) |
|||||||||||
Таким образом: |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
W раз ( p) |
|
|
|||||||
q xос |
q 1 |
|
|
|
|
|
|
|
|
|
|
|||
1 W |
|
|
( p) |
|
||||||||||
|
|
|
|
|
раз |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
Отсюда: |
|
q |
|
|
|
|
|
|
|
|
(*) |
|||
|
|
|
|
1 W раз |
( p) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Выражение (*) позволяет проводить исследования в точности, погрешности (ε) функционирования системы управления.
14.Способы устранения статических ошибок
Статическая система – это система, которая после привидения к одноконтурной схеме содержит только статические звенья. Астатическая система – это система, которая после привидения к одноконтурной схеме содержит хотя бы одно астатическое звено. Уравнение статики системы могут быть получены из уравнения динамики после подстановки в уравнение Р = 0 (оператор Лапласа).
Статическая ошибка: |
|
|
|
|
k2 |
|
||
xстf |
|
k1 |
k2 k3 |
f |
||||
|
|
|||||||
|
|
|
1 |
|
||||
Если |
бы система не содержала |
контур |
обратной связи, то: |
|||||
xстf |
k2 f |
|
|
|
|
|
|
|
Вывод: благодаря контуру отрицательной обратной связи, статическая ошибка на выходе системы, вызванная помехой f будет
меньше в [1 + К1 * К2 * К3] - раз.
Статизм – это мера статической точности системы:
ст |
|
xст |
|
k 2 |
|
(*) |
|
|
f ст |
|
1 k1 k 2 k3 |
|
|
Количественно статизм представляет собой относительную погрешность. Желательно, чтобы статизм в системах не превышал заданной величины и для большинства систем желательно:
ст 0
Способ устранения статической ошибки астатической системы управления.
Из формулы (*) видно, что: ст 0 , при условии, что:
k2 0 или k1 k2 0
В реальных условиях это можно достигнуть применением астатической системы управления, для этого в систему вводят интегрирующие звенья:
W1 |
k1 |
или |
W3 |
k3 |
|
p |
|
p |
|||
В статическом режиме: |
p 0 , тогда: |
W1 ( p) W3 ( p) и |
|||
ст 0. |
|
|
|
|
|

15.Критерий Гурвица
Устойчивость САУ – это свойство систем возвращаться первоначальное состояние после прекращения воздействия, выведшего из этого состояния.
Неустойчивое САУ – система не возвращается в состояние равновесия после окончания воздействия, а непрерывно удаляется от него или совершает недопустимо большие колебания около состояния равновесия.
Нейтральные САУ – это САУ которые после окончания воздействия устанавливаются в новое состояние равновесия отличное от первоначального. Нейтральные САУ - это неустойчивые САУ.
Критерии устойчивости САУ.
Критерий устойчивости – это условие, по которому можно судить об отрицательности вещественных частей корней характеристического уравнения, не вычисляя их значений.
Задача существенно облегчается тем, что нет необходимости находить значение корней характеристического уравнения, а можно воспользоваться нахождением критерия устойчивости. Все критерии делятся на две группы:
-алгебраические (Рауса, Гурвица, Рауса – Гурвица);
-частотные (Найквиста, Михайлова.).
Критерий Гурвица. Дано характеристическое уравнение:
a0 n a1 n 1 .... an 1 1 an 0 0
Составим определитель Гурвица:
|
|
a1 |
a3 |
a5 |
... |
... |
0 |
|
|
|
a0 |
a2 |
a4 |
... |
... |
0 |
|
n |
|
0 |
a1 |
a3 |
... |
... |
0 |
|
0 |
a0 |
a2 |
... |
... |
0 |
|||
|
|
|||||||
|
|
... ... ... ... |
... ... |
|||||
|
|
0 |
0 ... |
an 4 |
an 2 |
an |
||
Алгоритм составления определителя Гурвица:
1)a0 > 0 – это условие всегда выполнимо, т.к. левую и правую часть характеристического уравнения при необходимости можно умножить на (-1).
2)По главной диагонали последовательно записываются n – коэффициентов начиная от первого и кончая an .
3)Столбцы определителя заполняются вверх от диагональных элементов по возрастающим индексам, а вниз по убывающим индексам.
4)Коэффициенты с индексами меньше 0 и больше, чем n заменяются 0.
Условие устойчивости системы заключается в требовании положительности определителя Гурвица и всех его диагональных миноров.
Вывод: алгебраические критерии сравнительно просты для исследования систем имеющих характеристическое уравнение невысокого порядка (4 – 5). Алгебраические критерии становятся неудобными для систем имеющих характеристическое уравнение высокого порядка, кроме того, их невозможно использовать в системах содержащих звенья постоянного запаздывания.
16.Критерий Михайлова
Устойчивость САУ – это свойство систем возвращаться первоначальное состояние после прекращения воздействия, выведшего из этого состояния.
Неустойчивое САУ – система не возвращается в состояние равновесия после окончания воздействия, а непрерывно удаляется от него или совершает недопустимо большие колебания около состояния равновесия.
Нейтральные САУ – это САУ которые после окончания воздействия устанавливаются в новое состояние равновесия отличное от первоначального. Нейтральные САУ - это неустойчивые САУ.
Критерии устойчивости САУ.
Критерий устойчивости – это условие, по которому можно судить об отрицательности вещественных частей корней характеристического уравнения, не вычисляя их значений.
Задача существенно облегчается тем, что нет необходимости находить значение корней характеристического уравнения, а можно воспользоваться нахождением критерия устойчивости. Все критерии делятся на две группы:
-алгебраические (Рауса, Гурвица, Рауса – Гурвица);
-частотные (Найквиста, Михайлова.).
Критерий Михайлова.
Частотные критерии, по сравнению с алгебраическими, является более наглядным в силу своей простой геометрической интерпретации - это графический критерий.
Дано характеристическое уравнение системы представленное полиномом:
D( ) a n a n 1 |
.... a |
a |
n |
0 |
(1) |
|
0 |
1 |
|
n 1 |
|
|
|
Для перехода к частотной форме записи сделаем следующую
подстановку: i |
|
|
||
|
D(i ) U D ( ) i VD ( ) |
|
(2) |
|
где: U D ( ) - действительная часть, получаемая |
из |
слагаемых |
||
уравнения (1), содержащих четные степени λ; i VD ( ) - мнимая часть, получаемая из слагаемых уравнения (1), содержащих нечетные степени λ; i 
 1 - мнимая единица.
1 - мнимая единица.
Необходимо проварьировать ω, вычисляя: U D ( ) и i VD ( )
Годограф Михайлова
Правило построения гадогрофа:
Задавая значения частот 0 , вычисляются значения U D ( )
и i VD ( ) .
На комплексной плоскости строится гадограф (прямоугольная система координат).
Формулировка критерия Михайлова:
Система устойчива, если гадограф начинается на положительной действительной полуоси и огибает против часовой стрелки начало координат, проходя последовательно n – квадрантов, где n – старший показатель степени алгебраического уравнения

17. Критерий Найквиста
Устойчивость САУ – это свойство систем возвращаться первоначальное состояние после прекращения воздействия, выведшего из этого состояния.
Неустойчивое САУ – система не возвращается в состояние равновесия после окончания воздействия, а непрерывно удаляется от него или совершает недопустимо большие колебания около состояния равновесия.
Нейтральные САУ – это САУ которые после окончания воздействия устанавливаются в новое состояние равновесия отличное от первоначального. Нейтральные САУ - это неустойчивые САУ.
Критерии устойчивости САУ.
Критерий устойчивости – это условие, по которому можно судить об отрицательности вещественных частей корней характеристического уравнения, не вычисляя их значений.
Задача существенно облегчается тем, что нет необходимости находить значение корней характеристического уравнения, а можно воспользоваться нахождением критерия устойчивости. Все критерии делятся на две группы:
-алгебраические (Рауса, Гурвица, Рауса – Гурвица);
-частотные (Найквиста, Михайлова.).
Критерий Найквиста.
В отличии от критерия Михайлова, Критерия Найквиста позволяет судить об устойчивости системы по виду АФЧХ разомкнутой системы, которую можно получить как алгебраически, так и экспериментально.
Задана передаточная функция разомкнутой системы:
F ( p) (1)
D( p)
где: D( p) - характеристическое уравнение системы; F ( p) - возмущающее
воздействие.
Если известна передаточная функция разомкнутой системы, то передаточная функция замкнутой системы имеет вид:
|
|
|
|
|
(2) |
|||
|
|
WЗ ( p) |
|
W ( p) |
|
|||
|
|
1 W ( p) |
|
|
|
|||
Рассмотрим вспомогательную функцию с учетом уравнения (1): |
||||||||
|
1 W ( p) |
F ( p) D( p) |
|
(3) |
||||
|
D( p) |
|
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Числитель формулы (3) - это левая часть характеристического уравнения замкнутой системы, а знаменатель уравнения (3) - это левая часть характеристического уравнения разомкнутой системы.
Рассмотрим годограф вспомогательной функции, для этого перейдем к частотной форме записи: 1 W (i ) , при 0
1 W (i ) |
|
1 W (i ) |
|
ei ( ) |
|
F (i ) D(i ) |
|
(4) |
|||
|
|
|
|
ei ( ) |
|
||||||
|
|
||||||||||
|
|
|
|
|
|||||||
|
|
|
|
D(i ) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где: ( ) 1 ( ) 2 ( )
1 ( ) - фаза функции D(i ) разомкнутой системы;2 ( ) - фаза функции F(i ) замкнутой системы.
Вспомогательная функция 1 W (i ) отличается от частотной характеристики
разомкнутой системы на величину (+1), поэтому условие устойчивости по критерию Найквиста звучит так:
Если разомкнутая САУ устойчива, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы частотный гадограф W (i ) при изменении
частоты 0 не охватывая точку координатами (-1;0).
САУ в разомкнутом состоянии устойчива.
Системы в
замкнутом
состоянии
устойчивы (рис. а) и неустойчива (рис. б).
а) |
б) |
Если система в разомкнутом состоянии не устойчивая, то для устойчивости замкнутой системы необходимо чтобы частотный гадограф разомкнутой
системы W (i ) при изменении частоты 0 охватывал бы l/2 – раз в
положительном направлении точку с координатами (-1;i0), где l – число корней характеристического уравнения.
а) |
|
б) |
|
|
|
18.Логарифмические критерии устойчивости
Устойчивость САУ – это свойство систем возвращаться первоначальное состояние после прекращения воздействия, выведшего из этого состояния.
Неустойчивое САУ – система не возвращается в состояние равновесия после окончания воздействия, а непрерывно удаляется от него или совершает недопустимо большие колебания около состояния равновесия.
Нейтральные САУ – это САУ которые после окончания воздействия устанавливаются в новое состояние равновесия отличное от первоначального. Нейтральные САУ - это неустойчивые САУ.
Критерии устойчивости САУ.
Критерий устойчивости – это условие, по которому можно судить об отрицательности вещественных частей корней характеристического уравнения, не вычисляя их значений.
Задача существенно облегчается тем, что нет необходимости находить значение корней характеристического уравнения, а можно воспользоваться нахождением критерия устойчивости.
Логарифмические критерии устойчивости.
САУ в разомкнутом состоянии устойчивая:
1.и 4. Замкнутая система устойчивая;
2.Замкнутая система на границе устойчивости;
3.Замкнутая система не устойчивая.
Логарифмические критерии, так же как и критерии Найквиста позволяют судить об устойчивости замкнутой системы по виду ЛАХ и ЛФХ разомкнутой системы.
Для систем устойчивых в разомкнутом состоянии ЛАХ должна пересечь ось абсцисс раньше, чем фаза, спадая окончательно перейдѐт через
значение – π. Или на частоте среза Wc величина фазы φ должна быть
меньше значения – π, т.е.: φ< | – π |.
Для астатических систем и систем, неустойчивых в разомкнутом состоянии условия устойчивости в замкнутом состоянии:
При положительной ЛАХ число пересечений ЛФХ уровня – π снизу вверх
должно быть L раз больше числа пересечений в обратном направлении,
2
где L число корней характеристического уравнения.
Запас устойчивости по фазе ( φ) – это величина, на которую должно возрасти запаздывание по фазе в системе на частоте среза Wc чтобы система оказалась на границе устойчивости.
Запас устойчивости по амплитуде ( L) – это величина допустимого подъѐма ЛАХ при котором система окажется на границе устойчивости.
При проектировании САУ рекомендуется выбирать: 30 и
L 6дБ .
6 дБ – это примерно двойной запас коэффициента передачи по устойчивости.
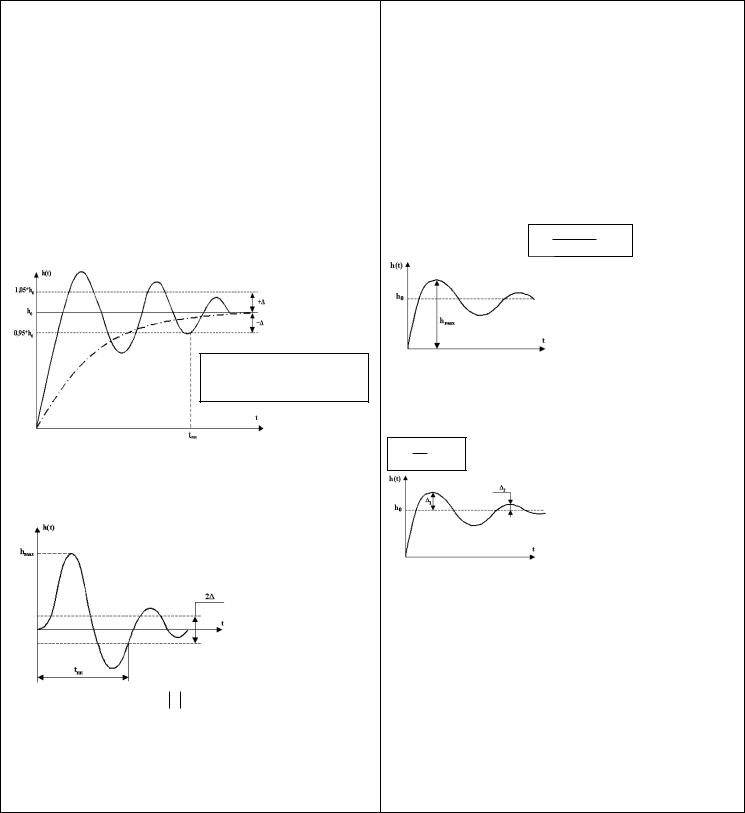
19.Понятие о качестве переходного процесса. Время переходного процесса Понятие о качестве переходных процессов.
При синтезе системы она должна отвечать трѐм основным требованиям:
1.Устойчивость (обеспечить требуемые запасы устойчивости по амплитуде и по фазе);
2.Требуемая точность в установившемся режиме (статическая ошибка должна быть меньше или равна заданного значения);
3.Качество переходного процесса.
Устойчивость САУ является необходимым, но не достаточным условием практической пригодности системы. Существенным требованием является качество переходных процессов, которое оценивается показателями качества.
Время переходного процесса.
Время переходного процесса – это один из показателей качества он характеризует быстродействие системы и определяется как интервал времени от начала переходного процесса, до момента, когда отклонение выходной величины от установившегося значения станет меньше определѐнной достаточно малой величины ре г .
рег 2% или рег 5%
h0 – установившееся значение выходного параметра;
рег h0 |
- абсолютная ошибка |
|
|||
|
|
|
|
|
|
рег |
|
|
- относительная ошибка (при: h0 |
0 ). |
|
h0 |
|||||
|
|
|
|
|
|
рег hmax
Для случая, когда h0 0 : 5%-зона вычисляется от максимального значения выходного параметра (т.е. 5% от hm ax ).
20. Перерегулирование. Колебательность переходного процесса Понятие о качестве переходных процессов.
При синтезе системы она должна отвечать трѐм основным требованиям:
1.Устойчивость (обеспечить требуемые запасы устойчивости по амплитуде и по фазе);
2.Требуемая точность в установившемся режиме (статическая ошибка должна быть меньше или равна заданного значения);
3.Качество переходного процесса.
Устойчивость САУ является необходимым, но не достаточным условием практической пригодности системы. Существенным требованием является качество переходных процессов, которое оценивается показателями качества.
Перерегулирование переходного процесса.
Перерегулирование ( ) – это один из показателей качества переходного процесса.
Перерегулирование – это отношение максимального отклонения выходной величены от ее установившегося значения к установившемуся значению:
hm ax h0 100 % h0
Колебательность переходного процесса.
Колебательность переходного процесса ( ) – это один из показателей
качества переходного процесса.
Колебательность переходного процесса – это отношение двух соседних максимальных отклонений переходной характеристики от установившегося значения:
1 100 %
2
Для незатухающих колебаний: 100%.
Для переходных характеристик, имеющих неколебательный характер (апериодическое звено): 0.
Вывод: Выполнение всех требований относительно численных показателей качество переходного процесса заставляет проектировщика искать компромисс в связи с возникающим противоречием этих требований. Например, при увеличении коэффициента передачи системы увеличивается быстродействие САУ, т.е. уменьшается время переходного процесса, но появляется и нарастает колебательность переходного процесса μ. При дальнейшем увеличении коэффициента передачи до его критического значения по критерию устойчивости системы значение колебательности возрастает до 100% (граница устойчивости незатухающий переходный процесс). Следовательно, длительность переходного процесса tпп 0.
Максимальное отклонение выходной величины от установившегося значения уменьшается с ростом коэффициента передачи, но по мере роста колебательности возникает и увеличивается величина перерегулирования. Таким образом, в общем случае качество переходного процесса зависит параметров САУ и от начальных условий, т.е. от состояния системы в момент приложения ступенчатого единичного воздействия.

21. Синтез систем. Коррекция САУ.
Синтез систем.
При исследовании САУ решают две задачи:
1.Анализ САУ – это когда при заданной САУ (дана структурная схема, передаточные функции, параметры передаточных функций) требуется найти переходные процессы возникающие в САУ; 2.Синтез САУ – когда при заданном объекте управления требуется построить
такое управляющее устройство, при котором система будет соответствовать заданным требованиям.
Если задача анализа имеет однозначное решение, то задача синтеза может иметь множество решений т.к. одни и те требования можно удовлетворить различными путями.
Задача синтеза может иметь две постановки:
1.Структура управляющего устройства задана. Необходимо определить только его параметры.
2.Структура системы не задана. Необходимо синтезировать структуру и параметры, которые бы обеспечили все требования предъявляемые к системе. При решении первой задачи предлагаемое корректирующее устройство должно быть технически осуществимо, поэтому на практике задача синтеза сужается, т.е. корректирующее устройство подбирается из стандартных корректирующих звеньев, поэтому при синтезе системы обычно ограничиваются определением вида и параметров стандартного корректирующего устройства. Иными словами, синтез обычно сводится к синтезу корректирующего устройства при неизменѐнной части остальной схемы САУ.
Коррекция САУ.
Целью коррекции динамических свойств САУ является удовлетворение требований предъявляемых к системе:
1.По устойчивости (запас устойчивости по амплитуде, по фазе);
2.По показателям качества переходного процесса (время переходного процесса, перерегулирование, колебательность и
т.п.) и по астатической точности (статическая погрешность).
Если эти требования не могут быть обеспечены только изменением параметров звеньев (коэффициент передачи, постоянная времени, время запаздывания), тогда в эту систему вводят специальные корректирующие звенья.
Существует три вида коррекции:
1.последовательная;
2.с помощью дополнительных связей;
3.смешанная.
Последовате
льная
коррекция
Коррекция с помощью дополнительных обратных связей
Смешанная
коррекция
Выбор вида коррекции происходит из анализа преимуществ и недостатков свойственных каждому виду коррекции.
При выборе схемы надо учитывать:
1.Последовательное включение корректирующих звеньев и введение производных в основную цепь увеличивает быстродействие системы, но одновременно при этом усиливается вредное воздействие высокочастотных возмущающих воздействий, кроме того, повышение скорости потребует повышение мощности системы и еѐ прочности. Введение интегрирующего звена делает систему астатической, т.е. устраняет астатическую ошибку, но для астатических систем приходится усложнять схему системы.
2.При включении корректирующего устройства в цепь обратной связи система становится менее чувствительна к внешним воздействиям и изменениям параметров основной цепи регулирования.
22. Последовательная коррекция. Нахождение корректирующего звена. Последовательная коррекция.
Корректирующие устройства включают в систему после измерительных устройств. Известно, что передаточная функция замкнутой системы
Wз ( p) есть отношение выходного сигнала к входному, выраженных в
преобразованиях Лапласа:
y( p) Wз ( p) x( p)
Передаточная функция разомкнутой системы:
Отсюда: 1 Wр ( p) Wр ( p)
Wз ( p)
1 |
1 |
|
|
|
|
|
1 |
Wр ( p) |
Wз ( p) |
||
Wз |
( p) |
|
Wр ( p) |
|
|||
|
Wр ( p) |
||||||
|
1 |
||||||
1 |
1 |
1 |
|||||
|
|
|
|
|
|||
|
W р ( p) |
Wз ( p) |
|||||
Таким образом: 1 |
|
1 Wз ( p) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
Wр ( p) |
Wз ( p) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
W р |
( p) |
|
Wз ( p) |
|
(*) |
|||
|
|
|
Wз |
|
|
|
||||
|
|
|
|
1 |
( p) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
В соответствии с выбранной схемой корректирующего устройства можно определить передаточную функцию корректирующего звена. Передаточная функция исходной системы:
Wисх ( p) W1 ( p) W2 ( p) W3 ( p)
Передаточная функция разомкнутой системы:
Wр ( p) W1 ( p) W2 ( p) W3 ( p) Wк ( p)
где: Wк ( p) - передаточная функция корректирующего звена.
Wк |
( p) |
|
Wр ( p) |
|
|
Wр ( p) |
|
|
( p) W2 ( p) W3 |
|
Wисх |
|
|||
|
W1 |
( p) |
|
( p) |
|||
С учетом уравнения (*) получим:
Wк |
( p) |
|
Wз ( p) |
|
|
|
( p) 1 Wз |
( p) |
|||
|
Wисх |
||||
После нахождения передаточной функции корректирующего звена следует решить задачу физической реализации корректирующего звена. При графоаналитическом методе расчета корректирующее звено выбирается с помощью ЛАХ и ЛФХ, при этом:
Wр ( p) Wисх ( p) Wкф ( p)
Переходя к логарифмическим частотным характеристикам, можно записать, что:
Lск ( ) Lр ( ) Lисх ( ) Lк ( )
Отсюда: Lк ( ) Lск ( ) Lисх ( )
Порядок графоаналитического вычисления корректирующего звена.
1.Строится ЛАХ исходной системы;
2.По заданным требованиям к качеству переходного процесса строится ЛАХ скорректированной системы; 3.По построенным ЛАХ строят соответствующие ЛФХ исходной и скорректированной систем;
4.определяют запас устойчивости по фазе и амплитуде;
5.Графическим вычитанием из ЛАХ скорректированной системы вычитают ЛАХ исходной системы и получают ЛАХ корректирующего звена; 6.По полученной ЛАХ корректирующего звена подбирают наиболее простую техническую реализацию корректирующего устройства.

23. Схемы промышленных пропорциональных регуляторов
Идеальный П-регулятор имеет передаточную функцию идеального усилительного звена. Реальный (промышленный) регулятор можно представить в виде двух звеньев W(p)y = Ky и W(p)им – исполнительный механизм
W ( p) ИМ Т 1 p
ИМ
Исполнительный механизм в динамическом отношении является интегрирующим звеном, следовательно для получения закона П- регулирования необходимо, чтобы он имел отрицательную обратную
связь для обеспечения условияW ( p) |
1 |
, |
W ( p)УС |
|
с целью повышения коэффициента передачи прямого канала эту отрицательную обратную связь надо представить следующим образом
W ( p) П |
К Р |
|
|
1 |
|
||
|
|
|
|||||
|
|
|
|||||
|
|
|
|
W ( p)ОС |
|||
W ( p) |
|
|
1 |
K |
. Таким образом канал обратной связи в |
||
|
ОС |
|
К Р |
|
|
ОС |
|
|
|
|
|
|
|
|
|
динамическом отношении должен быть выполнен в виде усилительного
звена с коэффициентом передачи К |
|
|
1 |
, т.е. он должен быть |
|
ОС |
|
К Р |
|
|
|
|
||
равным обратному значению коэффициента передачи разрабатываемого П-регулятора. С учетом изложенного структурная схема реального промышленного П-регулятора имеет вид
E |
У |
Оценим точность реализации закона П-регулирования реальным промышленным П-регулятором.
|
K y |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
Т Р |
|
1 |
|
|
|
|
|
1 |
|
|
W ( p) |
|
W ( p) Б |
|||
|
|
1 |
Кос |
|
Т |
|
|
|
П |
||||||||
1 K y K |
ос |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
р 1 |
|
|
|
||||
|
|
|
Т им Р |
|
|
|
|
|
им |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
К |
у К |
ос |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W ( p) П |
K P |
|
1 |
- передаточная функция П-регулятора |
|
||||
КОС |
|
|||
|
|
|
|
W ( p) Б |
|
|
1 |
|
- передаточная функция балластного звена |
|
|
|
|||
Т Б |
р 1 |
|
|||
|
|
|
|||
В динамическом отношении балластное звено является апериодическим звеном первого порядка.
TБ |
|
Тим |
- Временная(переходная) характеристика реального |
|
К у |
Кос |
|
||
|
|
|
||
промышленного П-регулятора
ТБ1>ТБ2
Чем меньше постоянная времени балластного звена, тем больше искажается идеальный закон П-регулятора.
24. Схемы промышленных ПИ регуляторов
Структурная схема регулятора имеет несколько вариантов:
По схеме а) закон ПИрегулятор выполняется аналогично идеальному ПИ, для уменьшения отрицательного влияния на закон ПИ-регулятора, исполнительный механизм вводится отрицательно обратная связь.
Первоначальная функция реального ПИ - регулятора по структурной схеме а) имеет вид.
W |
|
|
|
1 |
: |
|
Wос |
Kос : |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
ым |
|
|
Tим p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Wp p |
Wпи p |
|
Tим p |
|
Wпи p |
|
|
1 |
. |
||||||||||
1 Kос |
|
1 |
Tимр |
Kос |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
T |
|
|
p |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
им |
|
|
|
|
|
|
||
T |
|
|
Т |
им |
из выражения видно, |
что чем больше K ос , тем меньше Т б , однако |
|||||||||||||
б |
|
|
К ос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
следует |
иметь в |
виду, |
что |
при увеличении |
K ос , |
уменьшения коэффициента |
|||||||||||||
перерегулирования ПИрегулятора.
На схеме (б) закон ПИрегулирования реализуется за счѐт динамических свойств канала обратной связи, а усилительной части регулятора. Необходимую
периодическую функцию канала |
ОС можно найти из формулы: |
||||||||
Wпи |
p |
|
1 |
Wос |
р |
1 |
|
|
. |
|
p Kос |
KосWпи |
р |
|
|||||
|
Wос |
|
|
|
|||||
Если первоначальная функция регулирования должна отрабатывать закон ПИ-
регулирования то: W |
|
p |
k p |
K |
Tиз |
T Tиз . |
ос |
|
|
||||
|
|
Tp 1 |
|
K p Kос |
||
|
|
|
|
|||
Вывод: таким образом чтобы структурная схема (б) была реализована по закону ПИрегулятора, необходимо канал ОС в замкнутой части регулирования выполнить в виде реального дифференцирующего звена. На схеме (б) закон ПИрегулятора реализуется за счѐт динамических свойств канала ОС, как усилитель, так и в исполнительных частях регулирования, необходимая периодическая
функция ОС определяется из выражения: W |
р |
K p |
|
, при значении K |
Tиз |
. |
|
ос |
Tp |
1 |
|
K p |
|||
|
|
|
|||||
Рис. (2) имеет отличие от схемы а, б, в - в том, что динамические свойства интегрирующего исполнительного механизма используются для формирования закона ПИ-регулятора:
Wпи |
р |
|
1 |
|
. |
|
р Т им |
р |
|||
|
Wос |
||||
Если периодическая функция регулирования отражает закон ПИрегулятора то:
Wос |
р |
K |
|
K |
Tиз |
T Tиз |
||
Tp |
1 |
K pTин |
||||||
|
|
|
|
|||||
Вывод: таким образом, в качестве ОС для обеспечения закона ПИрегулятора следует применять периодическое звено.
При Т б =0 погрешность равна нулю, чем
больше Т б , тем больше динамическая
ошибка, учитывая, что исполнительный механизм регулирования располагается возле объекта регулирования, а аппаратурная часть регулирования размешается в пункте управления объекта. То при выборе определѐнной схеме
регулирования, при прочих равных условиях надо иметь в виду что схема (2) требует меньшего расхода кабельных материалов, при гидравлическом или исполнительном пневматическом механизме.
Следует отметить, что балластное звено в виде, а периодического звена как в случае с ПWрегулятором, так и в случае с П - регулятора оказывает положительное влияние на процесс регулирования величин благодаря демпфированию балластного звена, исполнительный механизм с таким регулятором не срабатывает, а это повышает срок его службы.