

Методические указания к курсовой работе по ММЭ
(заочники)
Задание
-
Выполнить временной анализ электронной схемы
1) получение от преподавателя варианта исследуемой электронной схемы;
2) выполнить временной анализ в системе CircuitMaker
3) Выполнить временной анализ самостоятельно в системе SciLab:
-
формирование динамической математической модели в виде системы интегрально – дифференциальных уравнений;
-
формирование дискретной квазистатической модели исследуемой схемы;
-
разработка SciLab - программы для получения переходной характеристики на основе квазистатической модели;
-
отладка и выполнение разработанной SciLab - программы;
-
анализ результатов моделирования;
4) сравнить результаты
-
Выполнить частотный анализ электронной схемы
1) Получение от преподавателя варианта исследуемой электронной схемы;
2) выполнить временной анализ в системе CircuitMaker
3) Выполнить временной анализ самостоятельно в системе SciLab:
-
формирование динамической математической модели в виде системы линейных интегрально – дифференциальных уравнений;
-
формирование изображения Лапласа динамической модели в форме системы комплексных линейных алгебраических уравнений;
-
разработка SciLab - программы для получения АЧХ и ФЧХ на основе решения системы комплексных линейных алгебраических уравнений;
-
отладка и выполнение разработанного SciLab - программы;
-
анализ результатов моделирования, определение частотных показателей;
4) Сравнить результаты Варианты исследуемых схем Фильтры Баттерворта и Чебышева

В табл. 7.1 и 7.2 приведены значения элементов нормированных фильтров Баттерворта и Чебышева с частотой среза 1 рад/с.
Значения элементов фильтров Баттерворта
|
n |
С1 |
L2 |
C3 |
L4 |
C5 |
L6 |
C7 |
L8 |
C9 |
|
|
1,4142 |
1,4142 |
|
|
|
|
|
|
|
|
|
1,0000 |
2,0000 |
1,0000 |
|
|
|
|
|
|
|
|
0,7654 |
1,8478 |
1,8478 |
0,7654 |
|
|
|
|
|
|
|
0,6180 |
1,6180 |
2,0000 |
1,6180 |
0,6180 |
|
|
|
|
|
|
0,5176 |
1,4142 |
1,9319 |
1,9319 |
1,4142 |
0,5176 |
|
|
|
|
|
0,4450 |
1,2470 |
1,8019 |
2,0000 |
1,8019 |
1,2470 |
0,4450 |
|
|
|
|
0,3902 |
1,1111 |
1,6629 |
1,9616 |
1,9616 |
1,6629 |
1,1111 |
0,3902 |
|
|
|
0,3473 |
1,0000 |
1,5321 |
1,8794 |
2,0000 |
1,8794 |
1,5321 |
1,0000 |
0,3473 |
Таблица 8.3.
Значения элементов фильтров Чебышева при Амакс = 1 дБ
|
n |
Rl |
C1 |
L2 |
C3 |
L4 |
C5 |
L6 |
C7 |
L8 |
C9 |
|
|
0,25 |
3,7779 |
0,3001 |
|
|
|
|
|
|
|
|
|
1,00 |
2,0236 |
0,9941 |
2,0236 |
|
|
|
|
|
|
|
|
0,25 |
4,5699 |
0,5428 |
5,3680 |
0,3406 |
|
|
|
|
|
|
|
1,00 |
2,1349 |
1,0911 |
3,0009 |
1,0911 |
2,1349 |
|
|
|
|
|
|
0,25 |
4,7366 |
0,5716 |
6,0240 |
0,5764 |
5,5353 |
0,3486 |
|
|
|
|
|
1,00 |
2,1666 |
1,1115 |
3,0936 |
1,1735 |
3,0936 |
1,1115 |
2,1666 |
|
|
|
|
0,25 |
4,7966 |
0,5803 |
6,1592 |
0,6005 |
6,1501 |
0,5836 |
5,5869 |
0,3515 |
|
|
|
1,00 |
2,1797 |
1,1192 |
3,1214 |
1,1897 |
3,1746 |
1,1897 |
3,1214 |
1,1192 |
2,1797 |
Фильтры Золотарева
Табл. 17.1 представляет
собой нормированные элементы фильтра
Золотарева четвертого порядка. В этой
таблице
![]() s,
As,
s,
As,
![]() As
– нормированная граничная частота
полосы задерживания, минимальное
ослабление в полосе задерживания,
максимальное ослабление в полосе
пропускания соответственно.
As
– нормированная граничная частота
полосы задерживания, минимальное
ослабление в полосе задерживания,
максимальное ослабление в полосе
пропускания соответственно.
|
|

Таблица 17.1. Параметры элементов фильтров Золотарева четвертого порядка
|
|
As, дБ |
С1 |
С2 |
L2 |
|
С3 |
L4 |
|
при
|
|||||||
|
3,98 3,39 2,96 2,63 |
56 50 45 41 |
0,7020 0,6871 0,6697 0,6497 |
0,04232 0,05952 0,08025 0,1049 |
1,241 1,215 1,186 1,152 |
4,364244 3,718173 3,241901 2,876673 |
1,282 1,272 1,261 1,248 |
0,7429 0,7440 0,7451 0,7465 |
|
при
|
|||||||
|
3,76 3,23 2,84 2,45 |
56 50 45 40 |
0,7575 0,7422 0,7245 0,6968 |
0,044585 0,06339 0,08436 0,1183 |
1,282 1,256 1,226 1,287 |
4,124781 3,544141 3,109875 2,677264 |
1,326 1,316 1,305 1,287 |
0,8018 0,8027 0,8037 0,8052 |
|
при
|
|||||||
|
3,39 2,96 2,53 2,22 |
56 51 45 40 |
0,8775 0,8612 0,8357 0,8057 |
0,05363 0,07202 0,1017 0,1382 |
1,349 1,321 1,278 1,229 |
3,718173 3,241901 2,773213 2,427221 |
1,400 0,390 1,373 1,354 |
0,9292 0,9297 0,9304 0,9311 |
|
при
|
|||||||
|
3,09 2,73 2,37 2,09 |
55 50 45 40 |
0,9807 0,9630 0,9356 0,9040 |
0,063309 0,08273 0,1141 0,1522 |
1,382 1,353 1,308 1,257 |
3,386078 2,988543 2,588050 2,286311 |
1,443 1,432 1,414 1,394 |
1,041 1,041 1,041 1,041 |
|
|
As, дБ |
L1 |
L2 |
С2 |
|
L3 |
С4 |
В теории фильтров
принято иметь дело не с обычной угловой
частотой
![]() ,
а с нормированной частотой
,
а с нормированной частотой
![]() ,
где
,
где
![]() –
нормирующая частота. Обычно в качестве
нормирующей частоты выбирают граничную
частоту полосы пропускания
–
нормирующая частота. Обычно в качестве
нормирующей частоты выбирают граничную
частоту полосы пропускания
![]() ,
так что
,
так что
![]()
Комплексная
проводимость нормированной емкости
![]() ,
откуда ненормированное значение емкости
,
откуда ненормированное значение емкости
![]() =
1,41×10–3/106 =nbsp;1,41×10–9
Ф = 1,41 нФ.
=
1,41×10–3/106 =nbsp;1,41×10–9
Ф = 1,41 нФ.
Подобным образом
комплексное сопротивление нормированной
индуктивности
![]() или
или
![]() =
1,41×103/106 = 1,41× 10–3 Гн
= 1,41 мГн.
=
1,41×103/106 = 1,41× 10–3 Гн
= 1,41 мГн.
Процедура синтеза
ФНЧ может выглядеть следующим
образом:
1. По формуле (17.17 а) определяем
порядок фильтра m. Если число m
четное, то в числитель данной формулы
добавляем слагаемое в соответствии с
выражением (17.40) и уточняем порядок
фильтра.
2. Из каталога фильтров
выбираем таблицы, соответствующие
данному порядку.
3. Из данных таблиц
выбираем строку, для которой с минимально
возможным отклонением выполняются
неравенства
![]()
Нормированные элементы данной строки и будут нормированными элементами фильтра, схема которого приведена на рисунке к данной таблице. При этом, обозначения элементов вверху таблицы относятся к схеме а, а внизу – к схеме б. Истинные значения элементов получаются путем денормирования.
Общие принципы моделирования электронных схем на основе системы компьютерной
математики SCILAB
SCILAB – это система компьютерной математики, которая предназначена для выполнения инженерных и научных вычислений, таких как:
-
решение нелинейных уравнений и систем;
-
решение задач линейной алгебры;
-
решение задач оптимизации;
-
дифференцирование и интегрирование;
-
задачи обработка экспериментальных данных (интерполяция и аппроксимация,
-
метод наименьших квадратов);
-
решение обыкновенных дифференциальных уравнений и систем.
Кроме того, SCILAB предоставляет широкие возможности по созданию и редактированию различных видов графиков и поверхностей. Не смотря на то, что система SCILAB содержит достаточное количество встроенных команд, операторов и функций, отличительная ее черта это гибкость. Пользователь может создать любую новую команду или функцию, а затем использовать ее наравне со встроенными. К тому же, система имеет достаточно мощный собственный язык программирования высокого уровня, что говорит о возможности решения новых задач.
Рекомендуемый порядок работы с системой SCILAB:
-
запуск системы с помощью файла WScilex.exe (результат – отображение основного окна системы);
-
запуск редактора с помощью пункта меню Editor основного окна системы (результат – отображение окна редактора);
-
ввод и редактирование SCILAB программы в окне редактора (результат – текст программы в окне редактора);
-
выполнение SCILAB программы с помощью пункта меню редактора Execute, подпункт Load into SCILAB (результат отображается в основном окне системы);
-
Сохранение SCILAB программы с помощью пункта меню редактора File (результат – файл с расширением .sce).
Рассмотрим примеры решения математических задач, наиболее часто встречающихся при математическом моделировании электронных схем.
Пример решения системы линейных уравнений с помощью системы SCILAB.
Дано: система линейных алгебраических уравнений вида:

Требуется: найти корни системы уравнений.
Решение: для решения задачи с помощью SCILAB необходимо преобразовать исходную систему уравнений в матричную форму AX=B:
 .
.
Определение корней системы линейных уравнений в SCILAB возможно различными способами:
а) воспользоваться встроенной функцией решения систем линейных алгебраических уравнений LinSolve(A, B), которая возвращает вектор корней уравнения;
б) применить формальный метод решения с помощью обратной матрицы X = A-1 B, который в SCILAB будет иметь следующий вид: X=inv(A)*B, где inv – встроенная функция вычисления обратной матрицы.
Текст SCILAB программы для решения задачи, который необходимо ввести в окне редактора:
// Ввод матрицы A
a11 = 0.3; a12 = 0.2; a13 = 6.6; a14 = -1.1;
a21 = 4.5; a22 = -1.8; a23 = -0.3; a24 = 6.5;
a31 = -7.3; a32 = 9.7; a33 = 10.9; a34 = -4.1;
a41 = 8.1; a42 = -2.7; a43 = 8.7; a44 = -8.7;
A = [a11 a12 a13 a14; a21 a22 a23 a24; a31 a32 a33 a34; a41 a42 a43 a44;];
// Ввод вектора B
b1 = 1; b2 = 6.5; b3 = -4.1; b4 = 8.9;
B = [b1; b2; b3; b4];
// Решение системы уравнений формальным методом
X=inv(A)*B;
// Решение системы уравнений с помощью встроенной функции
X=inv(A)*B;
X=LinSolve(A, B);
// Вывод решения
X
Для получения результата рения необходимо выполнить программу с помощью пункта меню редактора Execute, подпункт Load into SCILAB . Результат отобразится в основном окне системы:
X =
- 1.4039333
- 0.6028857
- 0.1027208
- 0.1997401
Пример решения системы нелинейных алгебраических уравнений с помощью системы SCILAB.
Дано: система нелинейных алгебраических уравнений вида:

Требуется: найти корни системы уравнений.
Решение:
особенностью решения нелинейных алгебраических уравнений является применение численных (итерационных) методов, для которых требуется назначение начальных приближений корней. В SCILAB для решения данной задачи используется встроенная функция fsolve([x1, … xn], fun), где x1, … xn – начальные приближения корней, fun – подпрограмма функция, в которой описана решаемая система уравнений. Пред применением исходная система уравнений должна быть представлена в следующей в форме:

Текст SCILAB программы для решения задачи, который необходимо ввести в окне редактора имеет следующий вид:
//Описание системы
function[y] = fun(x)
y(1) = 2*x(1)+x(2)-5+2*x(3)^2;
y(2) = x(2)^3 + x(3) - 4;
y(3)=x(1)*x(2)+x(3)-%e^x(3);
endfunction;
// Численное решение
[x]=fsolve([0.5 0.6 1], fun);
// вывод решения
x
Для получения результата рения необходимо выполнить программу с помощью пункта меню редактора Execute, подпункт Load into SCILAB . Результат отобразится в основном окне системы:
x = 1.0271746 1.4642447 0.8606410.
На основе вышеприведенных программ возможно построение более сложных процедур для выполнения всестороннего анализа электронных схем.
СТАТИЧЕСКИЙ АНАЛИЗ ЛИНЕЙНЫХ ЭЛЕКТРОННЫХ СХЕМ
Пример выполнения работы
Дано:
принципиальная схема анализируемого электронного устройства:

E1=10 B, E2 = 15 B, R1=10 Ом, R2=1 кОм, R3 = 2 кОм, R4=1.5 кОм, R5=2 кОм, R6 = 10 Ом
Рис. 3
Требуется:
моделирование статического режима работы схемы.
Решение:
1) Построение математической модели схемы:
-
построение схемы замещения для формирования математической модели в базисе узловых потенциалов, в которой источники ЭДС заменены на источники тока (рис.4);

J1 = E1/R1, J2 = E2/R6
Рис. 4
-
формирование элементов системы линейных алгебраических уравнений модели в форме
 :
:
а) матрица узловых проводимостей:

б) вектор узловых
токов:![]() ;
;
в) вектор потенциалов
узлов:
![]() .
.
2) построение программы моделирования для SciLab:
// ВВОД ИСХОДНЫХ ДАННЫХ
//Инициализация переменных
E1=10; E2 = 15; R1=10; R2=1E3; R3 = 2E3;R4=1.5E3; R5=2E3;
R6 = 10; I1=E1/R1; I2=E2/R6;
// ВВОД МОДЕЛИ
// матрица узловых проводимостей
y11 = 1/R1 + 1/R2 + 1/R3; y12 = -1/R2; y13 = -1/R3;
y21 = - 1/R2; y22 = 1/R2 + 1/R4 + 1/R5; y23 = -1/R5;
y31 = - 1/R3; y32 = -1/R5; y33 = 1/R3 + 1/R5 + 1/R6;
Y = [y11 y12 y13; y21 y22 y23; y31 y32 y33];
// вектор узловых источников тока
I = [I1; 0; I2];
// МОДЕЛИРОВАНИЕ
// решение СЛАУ формальным методом
F=inv(Y)*I;
// вывод результата
F
// проверка
Y*F-I
// решение СЛАУ с помощью функции linsolve
F=linsolve(Y, -I);
// вывод результата
F
// проверка
Y*F-I
// РАСЧЕТ ТОКОВ ВЕТВЕЙ
// Расчет разностей потенциалов ветвей в соответствии с
// произвольно выбранным направлением токов
u(1)=F(1); u(2)=F(1)- F(2); u(3)=F(1)- F(3); u(4)= F(2);
u(5)=F(2)- F(3);u(6)= F(3);
// ввод проводимостей ветвей
g(1) = 1/R1; g(2) = 1/R2; g(3) = 1/R3; g(4) = 1/R4;g(5) = 1/R5;
g(6) = 1/R6;
// расчет токов ветвей
For j=1:6;
i(j)=u(j)*g(j);
end;
// Вывод значений токов
i
// если значение тока отрицательное, то его направление
// противоположно назначенному на этапе расчета разностей
// потенциалов
F =
10.005283 потенциалы, рассчитанные формальным методом
8.0657334
14.940946
ans = результат проверки решения
0.
6.072D-18
- 2.220D-16
F = потенциалы, рассчитанные Linsolve
10.005283
8.0657334
14.940946
ans = результат проверки решения
0.
5.204D-18
0.
i = величины токов ветвей
1.0005283
0.0019395
- 0.0024678 направление тока от φ(3) к φ(1)
0.0053772
- 0.0034376 направление тока от φ(3) к φ(2)
1.4940946
ВРЕМЕННОЙ АНАЛИЗ ЭЛЕКТРОННЫХ СХЕМ
Пример выполнения работы
Дано:
принципиальная схема электронного устройства (Рис.17).

Рис.6.1. R1=10k L=0.1 мГн; R2 = 100k; C=1 мкФ; E=1 В
Требуется:
проведение динамического анализа на основе построения переходного процесса на выходе схемы.
Решение:
1) Описание эксперимента:
для построения переходной характеристики необходимо подать единичный ступенчатый сигнал на вход исследуемой схемы и определить форму сигнала на выходе. Ступенчатое воздействие можно реализовать путем подключения к входу в начальный момент времени постоянной ЭДС, при нулевых начальных условиях (uc(0) = φ2(0) = 0; iL(0) = 0) (рис.1).

Рис.6.1. Схема для проведения эксперимента
2) Построение математической модели ЭС:
|
|
(1) |

3) Алгоритм решения системы уравнений модели
Применим метод дискретизации. Метод основан на дискретизации времени моделирования и получении результата в табличной форме:
(t0, t1,… tm), (φ2(t0), φ2(t1),… φ2(tm)).
ti+1-ti= t; m=(tk-t0) /t.
Для последовательного вычисления потенциалов φ2(ti) строится дискретная (квазистатическая) модель, представляющая собой систему алгебраических уравнений, характеризующих ЭС в дискретный момент времени ti. Квазистатическая модель строится на основе дискретизации производных и интегралов исходной модели (1):
![]()

Таким образом, квазистатическая модель для момента ti+1 имеет вид:
|
|
(2)
|

Модель (2) представляет собой систему алгебраических уравнений, решив которую можно определить потенциалы в момент ti+1: φ1(ti+1) φ2(ti+1). Особенностью модели (2) является то, что она содержит данные о предыдущем состоянии схемы в момент ti: φ2(ti), iL(ti), которые должны быть известны. Следовательно, квазистатическую модель (2) можно применять только последовательно, начиная с момента t1, при условии, что состояние схемы в момент t0 известно: φ2(t0), iL(t0) – заданные начальные условия.
Система (2) представляет собой систему линейных алгебраических уравнений, которую можно привести к канонической форме:
![]()
|
|
(3) |

Система (3) матричной форме:

4) Программа моделирования
clear
//Инициализация
R1=10;R2=1E3;R3=1E3;E=1;L=1E-1;C=1E-6;
dt=1E-4;
J=E/R1;gL=dt/L;gc=C/dt;
//Матрица узловых проводимостей
y11=1/R1+gL; y12=-gL; y21=y12; y22=1/R2+gL+gc;
Y=[y11 y12; y21 y22];
//Начальные условия
f1(1)=0;f2(1)=0;
iL(1)=0; iC(1)=0;
I=[J-iL(1);iL(1)+iC(1)];
//Построение переходного процесса
i=2;
for j=1:50;
F=inv(Y)*I;
f1(i)=F(1); f2(i)=F(2);
iL(i)=dt/L*(f1(i)-f2(i))+iL(i-1);
iC(i)=(C/dt)*f2(i);
I=[J-iL(i);iL(i)+iC(i)];
i=i+1;
end;
plot(f2)

Рис.6.3. Переходная характеристика
ЧАСТОТНЫЙ АНАЛИЗ ЭЛЕКТРОННЫХ СХЕМ
Пример выполнения работы
Дано:
принципиальная схема электронного устройства (рис.10).

R0=100 Ом; R1=10 kОм; L=0.1 мГн; C=5 мкФ
Рис.10
Требуется:
проведение частотного анализа схемы.
Решение:
-
Построение модели схемы.
Схема замещения для построения модели в базисе узловых потенциалов показана на рис.11.

Рис.11.
Соответствующая динамическая модель имеет вид:

Для гармонического
входного сигнала (![]() )
применяется операторный метод решения
системы, основанный на замене исходной
системы системой комплексных линейных
алгебраических уравнений (преобразование
Лапласа):
)
применяется операторный метод решения
системы, основанный на замене исходной
системы системой комплексных линейных
алгебраических уравнений (преобразование
Лапласа):

Для получения канонической формы (YФ=I) системы линейных комплексных уравнений применяется схема замещения (рис.12).

Рис. 12
Элементы модели имеют вид:
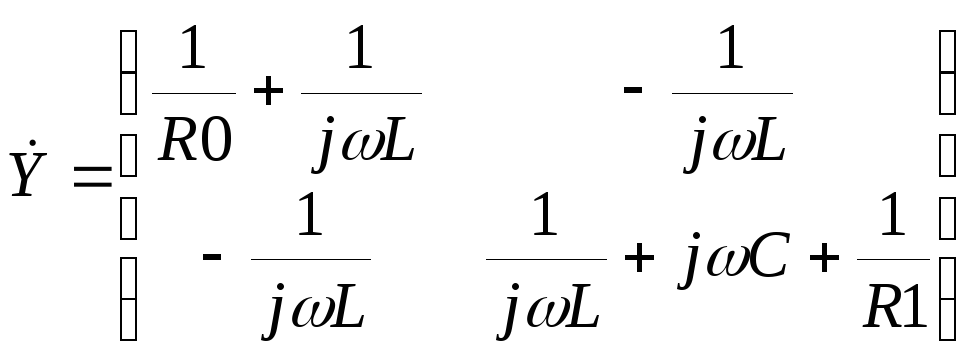 ;
;
![]() ;
;
 (1)
(1)
-
Вычислительный эксперимент.
Для выполнения вычислительного эксперимента применяется входной гармонический сигнал с нулевым фазовым сдвигом, амплитудой 1В, в заданном дискретном частотном диапазоне (w1 , wi … wi). Для каждой частоты диапазона wi вычисляется амплитуда
![]()
и фаза выходного сигнала
![]()
путем решения комплексной алгебраической системы уравнений (1).
3) Пример SciLab программы
L=1E-4; C=1E-6; R1=10; R2=10E3;w=%pi*10E4;
w=1;
for i=1:200
y11=1/R1-%i*(1/(L*w));
y12=%i*1/(L*w);
y21=y12;
y22=-%i*1/(L*w)+%i*(C*w)+1/R2;
Y=[y11 y12; y21 y22];
I=[0.1;0];
F=inv(Y)*I;
Ampl(i)=sqrt(real(F(2))^2+imag(F(2))^2);
Phase(i)=atan(imag(F(2))/real(F(2)))*180/%pi;
w=w+1000;
end;
plot(Ampl)
plot(Phase)
 Рис.
АЧХ
Рис.
АЧХ

Рис. ФЧХ
Основная литература
-
Нугаев И.Ф. Математическое моделирование электронных схем. Лабораторный практикум. -Уфа: изд УГАТУ, 2005, -33 с.
-
Нугаев И.Ф. Исследование электронных схем на основе математического моделирования. Методические указания по вырлнению курсовой аботы. -Уфа: изд УГАТУ, 2006, -33 с.
-
Влах И., Сингхал К. Машинные методы анализа и проектирования электронных схем.-М.: Радио и связь, 1988.-560 с.
-
Чуа Л.О., Пен-Мин Лин Машинный анализ электронных схем.- М.: Энергия, 1980. -680 с.
-
М.А. Амелина КОНСПЕКТ ЛЕКЦИЙ по курсу «Электронные промышленные устройства»
-
Бордовский Г. А. Физические основы математического моделирования: учебное пособие для вузов / Г. А. Бордовский, А. С. Кондратьев, А. Д. Р. Чоудери.-М.: Академия, 2005.-320 с.
-
Самарский А. А. Математическое моделирование. Идеи. Методы. Примеры / А. А. Самарский , А. П. Михайлов.-2-е изд., испр..-М.: ФИЗМАТЛИТ, 2005.-320 с.
-
Макаров Е.Г. Инженерные расчеты в MathCad: учебный курс. –Спб.: Питер, 2005,. -448 с.
-
Лобанов А. И. Вычислительные методы для анализа моделей сложных динамических систем: учебное пособие / А. И. Лобанов; М-во образования РФ, МФТИ.-М.: МФТИ, 2002.
Дополнительная литература
-
Ефанов В.Н., Ефанова Т.С. Методические указания по выполнению курсовой работы по курсу "Методы анализа и расчета электронных схем". -Уфа: изд УГАТУ, 1997, -27 с.
-
Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. -М.: Наука, 1987, -600 с. Автоматизация схемотехнического проектирования: учебное пособие/ Под ред. В.Н. Ильина. - М.: Радио и связь, 1987. -368 с.
-
Автоматизация схемотехнического проектирования: учебное пособие/ Под ред. В.Н. Ильина. - М.: Радио и связь, 1987. -368 с.
-
Диалоговые системы схемотехнического проектирования/ под ред. В.И. Анисимова. -М.: Радио и связь, 1988. -288 с.
-
Кауфман М., Сидман А. Практическое руководство по расчетам схем в электронике. -М.: Энергоатомиздат, 1991 г.
-
Расчет электронных схем/ Г.И. Изъюрова и др. -М.: Высшая школа, 1987. -334 с.
-
Трифонов И.И. Расчет электрических цепей с заданными частотными характеристиками. -М.: Радио и связь, 1988. -303 с.