

Мет.ук. тер.мех3
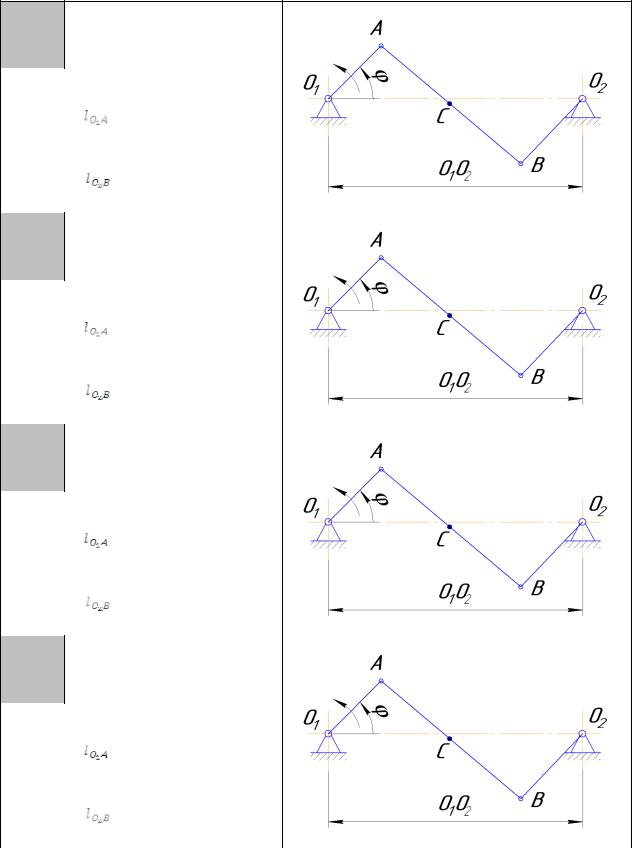
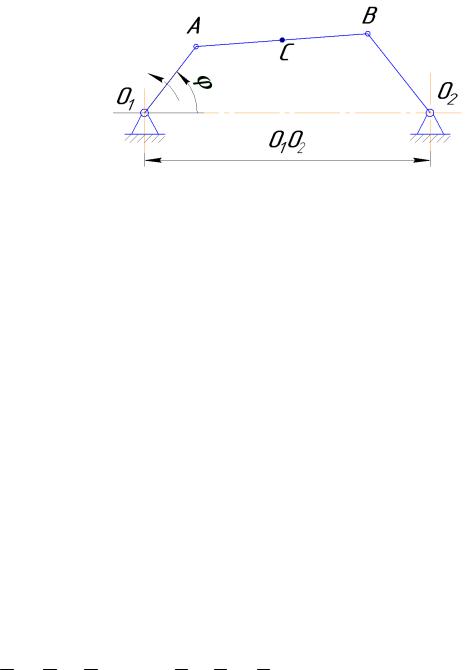
..pdf№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
19 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
8 |
|
|||
|
φ, град. |
|
90º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,080 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,040 |
|
|||
|
|
|
|
||||
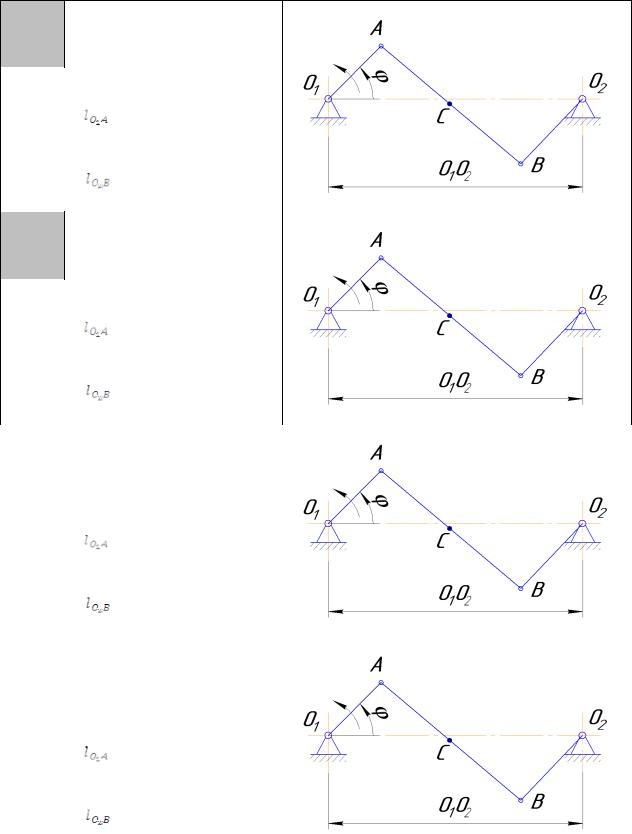
№Определить скорости точек В и С. Кривошип АВ равномерно
20 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
4 |
|
|||
|
φ, град. |
90º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,114 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,057 |
|
|||
|
|
|
||||
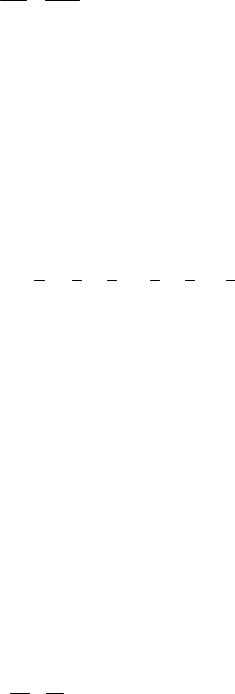
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
21 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
8 |
|
|||
|
φ, град. |
|
60º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,1 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,05 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С. Кривошип АВ равномерно
22 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
2 |
|
|||
|
φ, град. |
60º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,07 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,035 |
|
|||
|
|
|
||||
11
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
23 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
5 |
|
|||
|
φ, град. |
|
45º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,090 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,045 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С. Кривошип АВ равномерно
24 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
6 |
|
|||
|
φ, град. |
45º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,06 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,03 |
|
|||
|
|
|
||||
№Определить скорости точек В и С. Кривошип АВ равномерно
25 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
11 |
|
|||
|
φ, град. |
30º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,046 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,023 |
|
|||
|
|
|
||||
№Определить скорости точек В и С. Кривошип АВ равномерно
26 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
10 |
|
|||
|
φ, град. |
30º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,062 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,032 |
|
|||
|
|
|
||||
12

№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
27 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
12 |
|
|||
|
φ, град. |
|
30º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,092 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,046 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
28 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
4 |
|
|||
|
φ, град. |
|
135º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,08 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,04 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
29 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
6 |
|
|||
|
φ, град. |
|
135º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,13 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,065 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С. Кривошип АВ равномерно
30 |
вращается вокруг оси О1 с угловой |
|
||||
скоростью ω. |
|
|
||||
|
|
|
|
|
|
|
|
ω, с-1 |
2 |
|
|||
|
φ, град. |
180º |
|
|||
|
|
|
|
, м |
0,025 |
|
|
|
|
|
|
|
|
|
O1O2, |
0,085 |
|
|||
|
|
|
||||
|
lAB , м |
0,136 |
|
|||
|
|
|
||||
|
|
|
|
, м |
0,03 |
|
|
|
|
|
|
|
|
|
lAC , м |
0,068 |
|
|||
|
|
|
||||
13
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
31 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
9 |
|
|||
|
φ, град. |
|
180º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,09 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,045 |
|
|||
|
|
|
|
||||
№Определить скорости точек В и С.
|
|
|
Кривошип АВ равномерно |
|
|
||||
32 |
|
вращается вокруг оси О1 с угловой |
|
||||||
|
скоростью ω. |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
1,5 |
|
|||
|
|
|
φ, град. |
|
225º |
|
|||
|
|
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
|
|
||||
|
|
|
lAB , м |
|
0,08 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,04 |
|
|||
|
|
|
|
|
|
||||
|
№ |
|
Определить скорости точек В и С. |
|
|||||
|
|
|
Кривошип АВ равномерно |
|
|
||||
|
33 |
|
вращается вокруг оси О1 с угловой |
|
|||||
|
|
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
4 |
|
|||
|
|
|
φ, град. |
|
225º |
|
|||
|
|
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
|
|
||||
|
|
|
lAB , м |
|
0,126 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,063 |
|
|||
|
|
|
|
|
|
||||
|
№ |
|
Определить скорости точек В и С. |
|
|||||
|
|
|
Кривошип АВ равномерно |
|
|
||||
|
34 |
|
вращается вокруг оси О1 с угловой |
|
|||||
|
|
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
6 |
|
|||
|
|
|
φ, град. |
|
270º |
|
|||
|
|
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
|
|
||||
|
|
|
lAB , м |
|
0,11 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,055 |
|
|||
|
|
|
|
|
|
||||
14

№Определить скорости точек В и С. Кривошип АВ равномерно
35 |
|
вращается вокруг оси О1 с угловой |
|
||||||
|
скоростью ω. |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
7 |
|
|||
|
|
|
φ, град. |
|
270º |
|
|||
|
|
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
|
|
||||
|
|
|
lAB , м |
|
0,06 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,03 |
|
|||
|
|
|
|
|
|
||||
|
№ |
|
Определить скорости точек В и С. |
|
|||||
|
|
|
Кривошип АВ равномерно |
|
|
||||
|
36 |
|
вращается вокруг оси О1 с угловой |
|
|||||
|
|
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
5 |
|
|||
|
|
|
φ, град. |
|
315º |
|
|||
|
|
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
|
|
||||
|
|
|
lAB , м |
|
0,05 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,025 |
|
|||
|
|
|
|
|
|
||||
№Определить скорости точек В и С.
|
Кривошип АВ равномерно |
|
|
||||
37 |
вращается вокруг оси О1 с угловой |
|
|||||
скоростью ω. |
|
|
|||||
|
|
|
|
|
|
|
|
|
ω, с-1 |
|
7 |
|
|||
|
φ, град. |
|
315º |
|
|||
|
|
|
|
, м |
|
0,025 |
|
|
|
|
|
|
|
|
|
|
O1O2, |
|
0,085 |
|
|||
|
|
|
|
||||
|
lAB , м |
|
0,086 |
|
|||
|
|
|
|
||||
|
|
|
|
, м |
|
0,03 |
|
|
|
|
|
|
|
|
|
|
lAC , м |
|
0,043 |
|
|||
|
|
|
|
||||
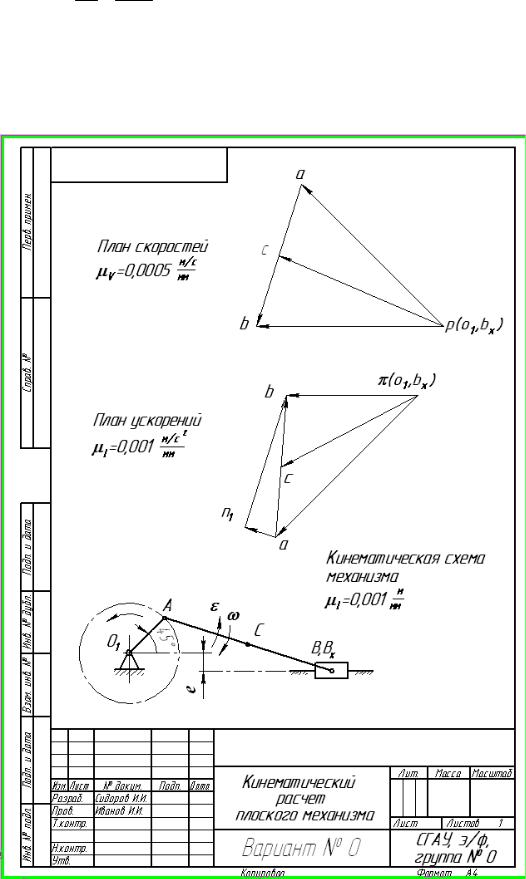
3. Пример . 3.1. Пример 1.
Определить для заданного положения механизма скорости и ускорения его точек, угловые скорости и угловые ускорения его звеньев, приняв угловую скорость кривошипа АВ постоянной.
Необходимые для расчета данные и размеры звеньев механизма приведены в
исходных данных.
Дано: φ=45º, ω=2 с-1, l0А=0,02 м, lАC=0,035 м, lАB=0,07 м, e =- 0,01 м.
Определить:
1)скорости и ускорения точек В, С механизма;
2)угловую скорость и ускорение звена АВ механизма.
15

Рис. 6.
Решение.
1.Построение кинематической схемы проведем в масштабе
µl= 0,001 м/мм.
Для этого длины звеньев механизма, координаты неподвижных шарниров и направляющей поршня пересчитаем в соответствии с выбранным масштабом:
О1 A=20 мм; АB=70 мм; АС= 35 мм; e=10 мм.
По полученным размерам строим кинематическую схему методом засечек для заданного положения ведущего звена.
2. Определим скорости точек механизма и угловые скорости звеньев механизма.
Скорость точки А, вращающейся с постоянной скоростью вокруг точки О1, направлена перпендикулярно звену О1 А и по модулю равна:
VА= ω1·lАВ = 2 · 0,02 = 0,04 м/с.
Для построения скоростей выбираем масштаб плана скоростей:
= |
VA |
= |
0,04 |
= 0,0005 |
м/ с |
|
|
|
|||
V |
pa |
80 |
|
мм |
|
|
|
||||
Составим векторное уравнение сложения скоростей при плоскопараллельном движении
VB =VA +VBA ,
где VВ – скорость точки В;
VА – скорость точки А, направленная перпендикулярно О1 А в соответствии с направлением угловой скорости ω1 звена О1 А;
VВА –скорость точки В во вращении звена АВ относительно точки А, по модулю неизвестна и направлена перпендикулярно АВ.
Проведем построения:
От полюса плана скоростей р откладываем отрезок (ра), изображающий скорость VА, и через его конец «а» проводим направление скорости VВА до пересечения с направлением скорости VВ в точке b. Отрезок (рb) изображает скорость VВ.
Скорость точки С найдем, по правилу подобия.
lAB = ab ,
lAC ac
Найдем истинные значения найденных скоростей, умножив соответствующие вектора на масштаб:
16
VВ=(рb) µ V=74,5·0,0005=0,037 м/с; VBА = (ab) µV=59,3·0,0005=0,03 м/с, VC = (рc) µ V=71,4·0,0005=0,036 м/с.
Найдем значения угловых скоростей звеньев механизма.
ω = VBА = 0,03 = 0,43c−1 lАB 0,07
Направление угловой скорости звена АВ механизма находим по вектору скорости, определяющего его численное значение.
3.Определим ускорения точек механизма и угловые ускорения его звеньев. Ускорение точки А, вращающейся с постоянной скоростью вокруг точки О1,
направлено по звену О1А от точки А к точке О1 и по модулю равна:
a |
А |
= ап |
= ω 2 |
l |
= 22 0,02 = 0,08 м/с2. |
||||||
|
|
А |
1 |
|
О A |
|
|
|
|||
|
|
|
|
|
|
|
1 |
|
|
|
|
Для построения ускорений выбираем масштаб скоростей: |
|||||||||||
µ |
|
= |
aА |
= |
0,08 |
= 0,001 |
м/ с |
|
|||
a |
πа |
|
мм |
||||||||
|
|
|
80 |
|
|
||||||
|
|
|
|
|
|
||||||
Составим векторное уравнение сложения ускорений при плоскопараллельном движении звена АВ:
аВ = аА + аBА = аА + аВАп + аВАτ ,
где аВ – ускорение точки В; аВ – нормальное ускорение точки В, направленное параллельно звену АО1 от
точки А к точке О1; апВА – нормальное ускорение точки В во вращении звена АВ относительно
точки А, по модулю равное aBnА = ω22 lАB = 0,432 0,07 = 0,013м/ с |
и направленное |
параллельно звену АВ от точки В к точке А; |
|
аτВА – касательное ускорение точки В во вращении звена АВ относительно точки А, по модулю неизвестнo и направлено перпендикулярно звену АВ.
Проведем построения. От полюса плана «π» ускорений откладываем отрезок (πb), изображающий ускорение аВ. Далее от точки «b» откладываем отрезок (ап1),
изображающий ускорение ап |
, длиной аn = |
aBnА |
= |
0,013 |
|
=13мм и направленный |
|
|
|
||||||
ВA |
1 |
|
|
0,001 |
|
||
|
|
a |
|
||||
|
|
|
|
|
|
|
|
параллельно звену СВ от точки С к точке В; через точку п1 проводим направление касательного ускорения аτСВ – линию перпендикулярную AВ до пересечения с линией действия вектора ускорения аB. Соединим полюс π с точкой «b» и получим отрезок (πb), соответствующий ускорению аB.
Вектор ускорения аC находим по правилу подобия.
lAB = ab .
lAC ac
Численно найденные ускорения равны:
аB=(πb) µ а=52,3·0,001=0,052 м/с2; аτВA =(n1b) µ а=55,2 ·0,001=0,055 м/с2; аC=(πc) µа=61,5·0,001=0,061 м/с2.
Угловое ускорение звена АВ механизма находим по формуле:
17
aτ 0,055 −с ε = BА = = 0,79с .
lАB 0,07
Направление углового ускорения звена АВ определяется вектором касательного ускорения, входящего в формулу по определению его численное значение.
Ответ: VВ= 0,037 |
м/с, VC= 0,036 м/с, аВ= 0,052 м/с2, аС= 0,061 м/с2, |
ω2= 0,43 |
с-1, ε= 0,79 с-2. |
Рис. 7.
18
3.2. Пример 2. |
|
|
|
Определить для заданного |
|
|
|
положения механизма скорости и |
|
|
|
ускорения его точек, угловые |
|
|
|
скорости и угловые ускорения |
|
|
|
его звеньев, приняв угловую |
|
|
|
скорость кривошипа АВ |
|
|
|
постоянной. |
|
|
|
Дано: φ=315°, ω=2 с-1, |
|
|
|
lОА=0,02 м, lАВ=0,07 м, |
|
|
|
О1О2=0,085 м, lОВ=0,03 м, |
Рис. 8. |
|
|
lАС=0,035 м, |
|
|
|
Определить: 1) |
скорости и ускорения точек В,СF механизма; |
|
|
2) |
угловые скорости и ускорения звеньев механизма. |
||
|
|
Решение. |
|
1. Построение кинематической схемы проведем в масштабе |
µ l=0,001 м/мм. |
||
Для этого длины звеньев механизма, координаты неподвижных шарниров и направляющей поршня пересчитаем в соответствии с выбранным масштабом.
О1А=20 мм, |
О1О2=85 мм, |
О2В =30 мм, |
АB=70 мм, |
АC=35 мм, |
|
По полученным размерам строим кинематическую схему методом засечек для заданного положения ведущего звена.
2. Определим скорости точек механизма и угловые скорости звеньев механизма.
Начинаем с точек принадлежащих звену АВ, которое непосредственно присоединено к ведущему звену. Построение ведем по векторным уравнениям
VВ =VА +VBА, VВ =VО2 +VВО2 ,
где VВ –скорость точки В; VА –скорость точки А, по модулю равная VА= ω1·lОА = = 2 · 0,02 = 0,04 м/с и направленная перпендикулярно О1А в соответствии с направлением угловой скорости ω1 звена О1А; VВА –cкорость точки В во вращении звена АВ относительно точки А, по модулю неизвестная и направленная перпендикулярно АВ; VО2 –cкорость точки О2, равная нулю; VВО –cкорость точки В во вращении звена ВО2 относительно точки О2, по модулю неизвестная и направленная перпендикулярно ВО2. Построения ведем в масштабе скоростей
V |
= |
VA |
= |
0,04 |
= 0,0005 |
м/ с |
. Cтроим решение первого векторного уравнения. Из |
pa |
|
мм |
|||||
|
|
80 |
|
|
|||
19

полюса плана скоростей «р» проведем отрезок ра, соответствующий скорости точки А, а через его конец «а» проводим прямую, перпендикулярную звену АВ. Переходим к построению решения второго векторного уравнения. Скорость
VО2 =0, поэтому через полюс «р» проводим прямую, перпендикулярную звену ВО2 до пересечения с направлением скорости VВА в точке «b». Отрезок (рb) изображает скорость VB. Конец вектора скорости точки C (точку c) найдем, вычислив отрезок (ac) по правилу подобия:
аb = aс lAB .
lAC
Найдем истинные значения найденных скоростей, умножив соответствующие отрезки из плана скоростей на масштаб:
VBA =(ab) µ V = 24,3·0,0005 = 0,012 м/с, VB =(pb) µ V = 79,7·0,0005 = 0,04 м/с, VC =(pc) µ V = 78,9·0,0005 = 0,039 м/с.
Найдем значения угловых скоростей звеньев механизма.
ω2 |
|
= |
VBА |
|
= |
(аb)µV |
= |
0,012 |
= 0,17с−1 , |
||||
|
lАB |
|
|
|
|||||||||
|
|
|
|
|
|
lAB |
|
0,07 |
|
||||
ω = |
VB |
|
= |
0,04 |
= 0,57с−1 , |
||||||||
|
|
|
|||||||||||
|
3 |
|
|
lO2 B |
0,07 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
Направление угловых скоростей звеньев механизма находим по векторам скоростей, определяющих их численные значения.
3.Определим ускорения точек механизма и угловые ускорения его звеньев. Строим план ускорений для точек, принадлежащих звеньям 2 и 3, по двум
векторным уравнениям:
аB = аA + аBA = аA + аВпA + аВτ A ,
аB = аO2 + аBO2 = аO2 + аBOп 2 + аBOτ 2 .
где аB – ускорение точки B; аA – нормальное ускорение(оно же полное) точки A, по модулю равное aА = аАп = ω12 lО1 A = 22 0,02 = 0,08 м/с2 и направленное параллельно
звену О1А от точки A к точке О1; апBA – нормальное ускорение точки B во вращении звена АB относительно точки A, по модулю равное
aBnА = ω22 lАB = 0,172 0,07 = 0,002м/ с2 и направленное параллельно звену AВ от точки B к точке A; аτВA – касательное ускорение точки B во вращении звена AВ относительно точки A, по модулю неизвестнoe и направленное перпендикулярно звену AВ; аO – ускорение точки О2, равное нулю; апBO – нормальное ускорение точки B во вращении звена ВО2 относительно точки О2, по модулю равное
аВОп 2 =ω32 lВО2 = 0,572 0,03 = 0,01м/ с2 и направленное параллельно звену ВО2 от точки
B к точке О2; аτBO – касательное ускорение точки B во вращении звена ВО2 относительно точки О2, по модулю неизвестнoe и направленное перпендикулярно звену ВО2. Масштаб плана ускорений выбираем равным:
µ |
|
= |
aА |
= |
0,08 |
= 0,001 |
м/ с |
. |
a |
πа |
|
|
|||||
|
|
80 |
|
мм |
||||
|
|
|
|
|||||
20