

ТСАУ (часть 1)
.pdfВ. А. НЕХАЕВ, В. А. НИКОЛАЕВ, А. Н. СМАЛЕВ
ТЕОРИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЧАСТЬ 1
ОМСК 2014
Министерство транспорта Российской Федерации Федеральное агентство железнодорожного транспорта Омский государственный университет путей сообщения
__________________________________________________________________________________
В. А. Нехаев, В. А. Николаев, А. Н. Смалев
ТЕОРИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Часть 1
Утверждено редакционно-издательским советом университета в качестве методических указаний к самостоятельной работе студентов
на практических занятиях по теории систем автоматического управления
Омск 2014
УДК 531 (075.8)
ББК 22.21я73
Г15
Теория систем автоматического управления: Методические указания к самостоятельной работе студентов на практических занятиях. Часть 1 / В. А. Нехаев, В. А. Николаев, А. Н. Смалев; Омский гос. ун-т путей сообщения.
Омск, 2014. 38 с.
Содержат теоретические сведения по классическим методам и задачам теории систем автоматического управления. Представлено три раздела: дифференциальные уравнения и передаточные функции, структурная схема динамической системы, частотные характеристики систем автоматического управления.
По каждому разделу приведены 30 вариантов индивидуальных задач для текущего контроля успеваемости студентов.
Предназначены для студентов третьего курса механического факультета специальности «Подвижной состав железных дорог».
Библиогр.: 2 назв. Табл. 6. Рис. 11.
Рецензенты: доктор техн. наук, профессор П. Д. Балакин; доктор техн. наук, профессор Е. И. Сковородников.
_________________________
Омский гос. университет путей сообщения, 2014
ОГЛАВЛЕНИЕ |
|
Введение ..................................................................................................................... |
5 |
1. Формирование математической модели САУ в виде дифференциальных |
|
уравнений и передаточных функций....................................................................... |
6 |
1.1. Теоретические сведения ................................................................................ |
6 |
1.2. Задание для самостоятельной работы ........................................................ |
13 |
1.3. Контрольные вопросы ................................................................................. |
18 |
2. Топологические преобразования структурной схемы САУ ........................... |
18 |
2.1. Теоретические сведения .............................................................................. |
18 |
2.2. Задание для самостоятельной работы ........................................................ |
23 |
2.3. Контрольные вопросы ................................................................................. |
29 |
3. Построение логарифмических амплитудной и фазовой частотных харак- |
|
теристик САУ .......................................................................................................... |
29 |
3.1. Теоретические сведения .............................................................................. |
29 |
3.2. Задание для самостоятельной работы ........................................................ |
35 |
3.3. Контрольные вопросы ................................................................................. |
35 |
Библиографический список.................................................................................... |
38 |
3
ВВЕДЕНИЕ
Теория систем автоматического управления изучает динамические системы, состояние которых изменяется с течением времени под действием какихлибо факторов. Наиболее изученный класс систем автоматического управления (САУ) составляют линейные непрерывные стационарные системы, описываемые системами линейных дифференциальных уравнений с постоянными коэффициентами. Подобные САУ находят самое широкое применение в технике благодаря простоте их анализа, синтеза и физической реализации.
Для составления дифференциальных уравнений динамики линейных систем могут использоваться общие теоремы динамики (в дифференциальной форме), уравнения Лагранжа 2-го рода – для описания движения механических объектов, методы контурных токов и узловых потенциалов – для описания электротехнических процессов, а также аналоги названных методов.
Важным этапом в формализации динамики систем является разбиение их на звенья (структурная декомпозиция), особенно необходимое в том случае, если система состоит из объектов различной физической природы.
Одним из основных требований, предъявляемых к САУ, является устойчивость. Понятие устойчивости динамической системы связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних факторов, которые вывели ее из этого состояния. Различают устойчивость равновесия и устойчивость движения. В последнем случае под устойчивостью понимают нечувствительность системы к посторонним возмущениям, что является необходимым условием ее стабильного функционирования. Оценить устойчивость системы можно по ее частотным характеристикам. В частности, исследование логарифмических частотных характеристик обеспечивает большие возможности при синтезе систем с заданными показателями ее устойчивости и качества.
Методические указания содержат теоретические сведения по классическим методам и задачам теории систем автоматического управления. По каждому разделу приведены 30 вариантов индивидуальных задач для текущего контроля успеваемости студентов, включая не только основное задание, обязательное для выполнения, для которого рассмотрены примеры решения задачи, но и дополнительное задание повышенной сложности, для решения которого студентам необходимо самостоятельно проработать учебную литературу и конспект лекций и выбрать методы, позволяющие решить поставленную задачу.
5
1. ФОРМИРОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ САУ В ВИДЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ И ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
1.1. Теоретические сведения
Процессы в любой динамической системе в общем случае могут быть описаны дифференциальным уравнением n-го порядка вида:
a |
d n y(t) |
a |
d n 1 y(t) |
... a |
y(t) b |
d m x(t) |
b |
d m 1x(t) |
... b x(t), (1) |
|
dtn |
dtn 1 |
dtm |
dtm 1 |
|||||||
n |
n 1 |
0 |
m |
m 1 |
0 |
где x(t) – входной сигнал (внешнее воздействие); y(t) – выходной сигнал (реакция системы);
ai, bj – коэффициенты уравнения, постоянные для линейных стационарных систем.
Если описание динамических процессов при наличии нескольких выходных величин приведено в виде системы дифференциальных уравнений меньших порядков, то математическая модель такой системы также может быть сведена к нескольким независимым уравнениям вида (1) для каждой выходной величины путем исключения из решения остальных выходных сигналов.
Вид математической модели, характеризующей процессы, протекающие в динамической системе, совершенно не зависит от их физической природы и одинаков, например, для механических и электрических систем. Дифференциальные уравнения или их система составляются согласно расчетной схеме – упрощенному графическому представлению свойств системы с указанием основных функциональных элементов, оказывающих наиболее существенное влияние на характер протекания процессов, и связей между ними.
Для того чтобы составить уравнения динамики процессов в электрической схеме, можно воспользоваться законами Кирхгофа. Основными элементами расчетной (принципиальной) схемы электрической цепи переменного тока (в общем случае) являются резисторы, рассеивающие электрическую энергию, катушки индуктивности, характеризующие инерционные свойства системы, и конденсаторы, способные запасать электрический заряд, а вместе с ним и потенциальную энергию (рис. 1).
6
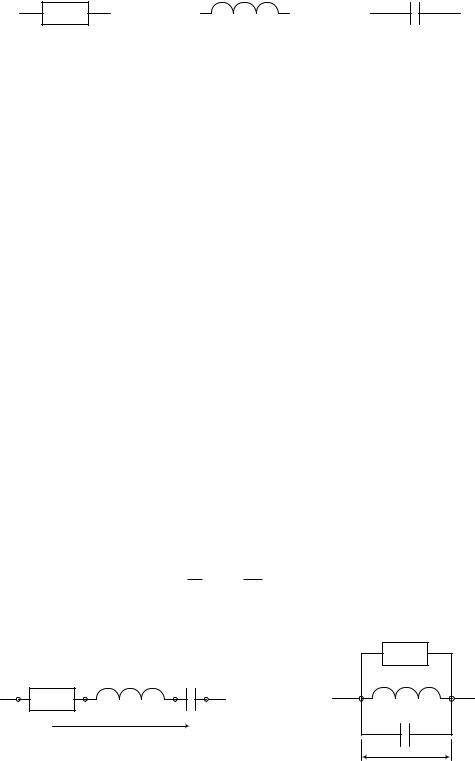
R |
L |
C |
а |
б |
в |
Рис. 1. Обозначение элементов электрической цепи на схеме: резистор (а), катушка индуктивности (б), конденсатор (в)
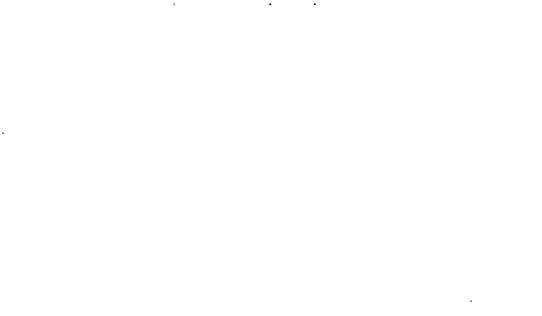
Элементы в схеме могут быть соединены разными способами. Рассмотрим два основных вида соединения: последовательное и параллельное (рис. 2). Известно, что в первом случае через все элементы проходит одинаковый ток i, а во втором – в каждом из элементов происходит одинаковое падение напряжения (разность потенциалов) u. Эти свойства электрической цепи позволяют определить соотношения между сопротивлениями соединенных элементов. Так, при последовательном соединении складываются полные (комплексные или динамические) сопротивления Zi элементов:
n |
|
Z Zi , |
(2) |
i 1 |
|
при параллельном же соединении складываются их полные проводимости Gi (величины, обратные сопротивлениям):
|
|
|
n |
|
|
|
|
G Gi |
(3) |
||
|
|
|
i 1 |
|
|
или |
|
|
|
|
|
|
|
|
n |
|
|
|
|
1 |
1 . |
(4) |
|
|
|
Z |
i 1 |
Zi |
|
|
|
|
|
|
R |
R |
L |
C |
|
|
L |
|
i |
|
|
|
C |
|
|
|
|
|
u |
|
а |
|
|
|
б |
Рис. 2. Виды соединения элементов электрической цепи: последовательное (а), параллельное (б)
7
При составлении системы уравнений для электрической цепи с помощью законов Кирхгофа необходимо помнить о соотношении между падением напряжения на элементе и током, протекающим через него:
uR (t) R iR (t) – для резистора (активного сопротивления); |
(5) |
|||||||
uL |
(t) L |
diL |
(t) |
– для катушки индуктивности; |
(6) |
|||
|
dt |
|
||||||
|
|
|
|
|
|
|
||
|
|
C |
|
|
|
|
|
|
u |
(t) |
1 |
|
i |
|
(t)dt – для конденсатора (электрической емкости). |
(7) |
|
|
|
|
||||||
C |
|
|
|
C |
|
|
|
|
Полное (комплексное) сопротивление перечисленных элементов можно выразить, записав полученные выражения в операторной форме (при нулевых начальных условиях в уравнениях системы):
UR (s) R IR (s); |
(8) |
||||||
UL (s) Ls IL (s); |
(9) |
||||||
U |
|
(t) |
1 |
I |
|
(s), |
(10) |
C |
|
C |
|||||
|
|
Cs |
|
|
|||
|
|
|
|
|
|
||
т. е. динамическое сопротивление резистора, индуктивности и емкости равно R, Ls и 1/Cs соответственно:
ZR R; |
(11) |
||||
ZL Ls; |
(12) |
||||
Z |
|
|
1 |
. |
(13) |
C |
|
||||
|
|
Cs |
|
||
|
|
|
|
||
Сами законы Кирхгофа можно сформулировать следующим образом: суммарная электродвижущая сила (ЭДС) в замкнутом контуре (может
быть равна нулю, если контур не содержит источников напряжения) равна падению напряжения на пассивных элементах (активных и реактивных сопротивлениях) данного контура (это 2-й закон Кирхгофа):
8
n |
m |
|
ei |
(t) ui (t). |
(14) |
i 1 |
j 1 |
|
Чтобы исключить из системы уравнений лишние сигналы и, как следствие, сократить количество уравнений, можно воспользоваться 1-м законом Кирхгофа, утверждающим, что алгебраическая сумма токов в любом узле A электрической цепи равна нулю (т. е. сумма входящих в узел A токов равна сумме токов, выходящих из него):
p |
|
ikA (t) 0. |
(15) |
k 1
Для формирования математической модели динамических процессов в механической системе применяют метод для энергий (уравнение Лагранжа 2-го рода) или для сил, действующих в системе на каждый ее элемент (метод Даламбера – Лагранжа, называемый общим уравнением динамики).
Уравнение Лагранжа 2-го рода имеет вид:
d |
|
T |
|
|
T |
|
Ф |
П Fi (t), |
(16) |
|
|
|
|||||||||
|
|
|
||||||||
dt |
qi |
|
qi |
qi |
qi |
|
||||
где T – суммарная кинетическая энергия системы;
Ф – диссипативная функция Рэлея (функция рассеяния энергии); П – суммарная потенциальная энергия;
q и qi – i-я обобщенная координата системы и ее скорость; Fi – обобщенная сила для i-й координаты.
Количество обобщенных координат, а следовательно, и уравнений в системе, определяется числом степеней свободы в рассматриваемой расчетной схеме. В уравнение Лагранжа 2-го рода входят частные производные по обоб-
щенным координатам или их скорости. Первое слагаемое |
d |
|
T |
|
, содержа- |
|
|
|
|||||
|
|
|||||
|
dt |
qi |
|
|||
щее, кроме того, полную производную по времени от частной производной кинетической энергии по скорости, характеризует инерционные свойства систе-
9