

MS_bak_220400_220700
.pdfРис. 3.18. Динамические характеристики оптимальной комбинированной ЦСУ температуры на верхней контрольной тарелке колонны при импульсном возмущении по расходу экстрагента:
x - расход экстрагента; y 3 - задание по температуре; y - температура; u - расход флегмы
Сравнивая динамические характеристики комбинированной и одноконтурной ЦСУ (рис. 3.19) при нанесении импульсного возмущения по расходу экстрагента x , делаем вывод, что включение цифрового компенсатора в систему позволяет снизить влияние контролируемого возмущения на управляемый параметр
y (температуру на контрольной тарелке).
111
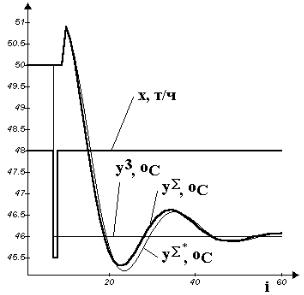
Рис. 3.19. Динамические характеристики ЦСУ температуры на верхней контрольной тарелке: x - расход экстрагента;
y 3 - задание по температуре; y - выход объекта с оптимальным компенсатором; y * - выход объекта без компенсатора
Расчет цифрового компенсатора в комбинированной системе (рис. 3.17) из условия инвариантности позволяет практически полностью компенсировать влияние возмущающего воздействия на управляемый параметр при точном описании динамики объекта.
Для этого необходимо получить дискретные передаточные функции каналов объекта, а затем, используя условие инвариантности, вывести передаточную функцию компенсатора:
Wk z |
Wx z |
uk z |
|
|||||
|
|
|
|
|
|
, |
(3.80) |
|
|
|
|
z |
|
||||
|
Wo z |
|
|
x |
|
|
|
|
112
|
|
|
|
b x z 1 dx |
|
|
|
|
|
|
|
|
|
|
z |
1 a x z 1 |
- дискретная передаточная функция воз- |
||||||||||||
где Wx |
|
|||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
b z 1 d |
|
|
|
|
|
|
|
|
|
|
1 |
a z 1 a |
|
z 2 - дискретная пе- |
||||||
мущающего канала; Wo z |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
редаточная |
функция |
основного канала; |
uk z , x z - выход и |
|||||||||||
вход цифрового компенсатора.
Дискретные передаточные функции получены из разностных уравнений системы (3.33) с помощью оператора сдвига z .
Подставляя передаточные функции в условие (3.80) получим уравнение цифрового компенсатора в операционном исчислении:
uk z a x uk z z 1 |
|
b x |
x z z dx d |
|
|||||
|
|
||||||||
|
|
1 |
|
b |
|
|
|
||
|
|
|
|
|
|
(3.81) |
|||
|
b x a1 |
|
|
|
b x a2 |
|
|||
|
x z z 1 dx d |
x z z 2 dx d . |
|||||||
b |
|
||||||||
|
|
|
|
|
b |
|
|
||
Проводя обратное преобразование z , получим разностное уравнение цифрового компенсатора, которое подставляем в систему (3.78) вместо второго уравнения:
uk |
|
a x uk |
|
|
b x |
|
x |
|
|
|
|
|
|
||||
i |
i 1 |
|
i dx d |
|
|
||||||||||||
|
|
1 |
|
|
|
|
b |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.82) |
||
|
b x a |
|
|
|
|
|
|
|
b x a |
|
|
|
|
||||
|
x |
|
|
|
|
|
2 |
|
x |
|
|
||||||
|
|
1 |
|
|
|
|
|
|
|
|
. |
||||||
|
|
b |
i 1 dx d |
|
b |
|
|
i 2 dx d |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Расчет компенсатора из условия инвариантности можно выполнить в том случае, если запаздывание по возмущающему каналу больше, чем по основному, т. е. dx d .
113
3.9. Расчет цифровых регуляторов несвязанной системы управления объектом с двумя связанными параметрами по критерию минимум суммы интегральноквадратичных ошибок
Для технологических объектов с перекрестными внутренними связями между параметрами применяют схему несвязанного управления (рис. 3.20, 3.21).
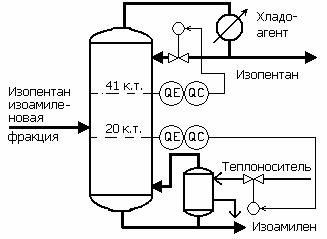
Рис. 3.20. Пример несвязанной системы управления концентрациями изоамиленов и изопентана на контрольных тарелках (к.т. № 41 и № 20) колонны ректификации: QE – датчики состава; QC – регуляторы состава
114

Рис. 3.21. Структурная схема несвязанной системы управления:
WP1 ,WP2 ,WO1 ,WO2 ,WO12 ,WO21 - передаточные функции регуляторов и основных, перекрестных каналов управления; y31 , y32 - задающие воз-
действия; e1 ,e2 - величины рассогласования; u1 , u2 - управляющие
воздействия; y1 , y2 |
- суммарные выходы объекта |
|
|
||||||||||||||||
|
Настройка регуляторов несвязанной ЦСУ (рис. 3.21) про- |
||||||||||||||||||
водится с учетом перекрестных связей в объекте: |
|
|
|||||||||||||||||
u1 |
u1 |
q1 y31 y1 |
q1 |
y31 y1 q1 y31 y1 , |
|||||||||||||||
i |
|
i 1 |
0 |
|
i |
|
i |
|
|
1 |
|
i 1 |
i 1 |
|
2 |
i 2 |
i 2 |
||
u2 |
u2 |
q2 y |
32 |
y2 q |
2 y32 |
y2 |
q2 |
y32 |
y2 , |
||||||||||
i |
|
i 1 |
0 |
|
|
i |
i |
|
|
1 |
|
i 1 |
i 1 |
|
2 |
i 2 |
i 2 |
||
y1 |
|
|
a1 y1 |
|
|
a1 y1 |
|
|
b1u1 , |
|
|
|
|
(3.83) |
|||||
i d1 1 |
|
|
1 i d1 |
|
2 i d1 1 |
|
|
|
i |
|
|
|
|
|
|||||
y12 |
|
a12 y12 |
|
b12 u1 , |
|
|
|
|
|
|
|
|
|
||||||
i d12 1 |
|
1 |
i d12 |
|
|
i |
|
|
|
|
|
|
|
|
|
||||
y2 |
|
|
a2 y2 |
|
|
b2 u2 |
|
b2 u2 |
|
, |
|
|
|
|
|
||||
i d 2 1 |
|
|
1 i d 2 |
|
1 i |
|
|
2 i 1 |
|
|
|
|
|
|
|||||
y21 |
|
a21 y21 |
|
a21 y21 |
|
|
a21 y21 |
|
b21u2 |
, |
|||||||||
i d 21 1 |
|
1 |
i d 21 |
2 |
|
i d 21 1 |
|
|
3 i d 21 2 |
|
i |
|
|||||||
y1 |
|
y1 |
|
y21 |
, |
|
|
|
|
|
|
|
|
|
|||||
i d1 1 |
|
|
i d1 1 |
|
|
i d1 1 |
|
|
|
|
|
|
|
|
|
|
|
||
y2 |
|
y2 |
|
|
y12 |
|
, |
|
|
|
|
|
|
|
|
|
|||
i d 2 1 |
|
|
i d 2 1 |
|
|
i d 2 1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
115 |
где u1 ,u2 - входные управляющие воздействия; |
y1 |
, y2 |
, y12 |
, y21 - |
|||||||||||||
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
i |
i |
i |
i |
выходы |
объекта |
по |
основным |
и |
перекрестным |
каналам; |
|||||||||||
a1 ,a1 ,b1 ,d1,a2 |
,b2 |
,b2 |
,d2 и |
a12 |
,b12 ,d12,a21 |
,a21 ,a21 ,b21 ,d21 - |
|||||||||||
1 |
2 |
|
1 |
1 |
2 |
|
|
1 |
|
|
1 |
|
2 |
|
3 |
|
|
параметры моделей объекта; |
y1 |
, y2 |
- суммарные выходы объ- |
||||||||||||||
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
|
|
|
|
екта; q1 |
,q1 |
,q1 ,q2 ,q2 ,q2 |
- искомые настройки цифровых регу- |
||||||||||||||
|
0 |
1 |
2 |
0 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
ляторов 2-го порядка. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Начальные условия: |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
y31 |
|
0 |
при |
i mc |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
i mc |
, |
|
|
|
|
|
||
|
|
|
|
|
i |
|
y31 |
при |
|
|
|
|
|
|
|
||
|
|
|
|
|
y32 |
|
0 |
при |
i mc |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
i mc |
, |
|
|
|
|
|
||
|
|
|
|
|
i |
|
y32 |
при |
|
|
|
|
|
|
|
||
где |
y31 , y32 |
- величины задающих воздействий; |
mc - перемен- |
||||||||||||||
ная, принимающая наибольшее значение из порядков n1,n2,n12
и n21 ( mc =3);
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
u1 |
u2 0, |
i 1,mc 1 ; |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
y1 |
0, |
i 1,mc d1; |
y12 |
0, |
i 1,mc d12 ; |
|
|||||||||||||||||
i |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
y2 |
0, |
i 1,mc d2 ; |
y21 |
0, |
i 1,mc d21; |
|
|||||||||||||||||
i |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 0, |
|
y2 0, |
|
|
|
|
|
||||||||||||||||
i 1,mc d1; |
|
i 1,mc d2 . |
|
||||||||||||||||||||
i |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод покоординатного спуска позволяет проводить одно- |
|||||||||||||||||||||||
временную оптимизацию настроек |
|
q1 ,q1 |
,q1 |
,q2 |
,q2 |
,q2 |
цифро- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
|
0 |
1 |
2 |
|
|
|
|
||||
вых регуляторов в составе несвязанной системы управления по критерию минимум суммы интегрально-квадратичных ошибок
(см. пункт 3.5):
116

N |
N |
|
yi2 2 , (3.84) |
S A1 yi31 yi1 2 |
A2 yi32 |
||
i mc |
i mc |
|
|
|
2 |
|
|
где A1 , A2 - весовые коэффициенты ( Ak |
1). |
||
k 1
Для одновременной оптимизации цифровых регуляторов и
компенсаторов формируется общий массив настроек g и по каждой настройке проводится расчет в соответствии с приведенной методикой оптимизации (см. пункт 3.5) до выполнения условия:
|
|
|
|
|
|
|
|
h j |
, |
k 1, L , |
(3.85) |
||
|
k |
|
|
|
|
|
где h j |
- рассчитываемый шаг по |
k -той настройке на |
j -той ите- |
|||
k |
|
|
|
|
|
|
рации приближения к оптимуму; L - общее число оптимизируемых настроек.
После расчета настроек (табл. 3.10) проводится исследование динамических характеристик несвязанной ЦСУ (рис. 3.22).
117
|
|
|
|
|
|
|
Таблица 3.10 |
|
|
|
Параметры оптимальной несвязанной ЦСУ |
|
|
||||
|
|
|
|
|
|
|||
|
Параметры моделей |
Оптимальные настройки |
|
Такт |
|
|||
|
объекта управления |
|
цифровых регуляторов |
|
Квантова- |
|
||
|
|
|
|
|
|
|
ния |
|
|
|
1 |
|
|
1 |
|
сигналов |
|
|
|
WO |
|
|
WP |
|
|
|
a1 |
1,739410 |
q1 |
1130593, (т/ч)/% |
|
T0 4,0 |
|
||
1 |
|
|
0 |
|
|
|
|
|
|
1 |
0,788627 |
|
1 |
2,068354 (т/ч)/% |
|
мин |
|
a2 |
q1 |
|
|
|
||||
b1 |
0,212896 %/(т/ч) |
q1 |
1,000220 (т/ч)/% |
|
|
|
||
|
|
|
|
2 |
|
|
|
|
d1 4 |
|
|
|
|
|
|
||
|
|
W 12 |
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
a12 |
0,961012 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
b12 |
0,044751 %/(т/ч) |
|
|
|
|
|
|
|
d12 7 |
|
|
|
|
|
|
||
|
|
W 2 |
|
|
W 2 |
|
|
|
|
|
O |
|
|
P |
|
|
|
a |
2 |
0,923788 |
q |
2 |
0,848153 (т/ч)/% |
|
|
|
1 |
|
|
0 |
|
|
|
|
|
b |
2 |
0,575315 %/(т/ч) |
q |
2 |
1,266304 (т/ч)/% |
|
|
|
1 |
|
1 |
|
|
|
|
||
b |
2 |
0,382540 %/(т/ч) |
q |
2 |
0,460208 (т/ч)/% |
|
|
|
2 |
|
|
2 |
|
|
|
|
|
d2 2 |
|
|
|
|
|
|
||
|
|
W 21 |
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
a |
21 |
1,322264 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
a |
21 |
0108190, |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
a |
21 |
0,451724 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
b21 0,090779 %/(т/ч) |
|
|
|
|
|
|
||
d21 10 |
|
|
|
|
|
|
||
118
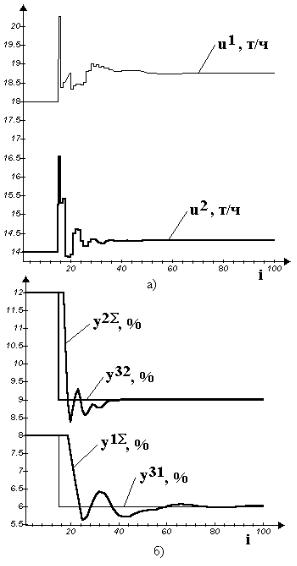
Рис. 3.22. Динамические характеристики оптимальной несвязанной системы управления концентрациями изоамиленов и изопентана на контрольных тарелках в колонне ректификации:
119
а) u1 - расход флегмы; u2 - расход теплоносителя в кипятильник колонны; б) y 31 - задание по концентрации изоамиленов; y1 - концен-
трация изоамиленов; y 32 - задание по концентрации изопентана; y 2 - концентрация изопентана
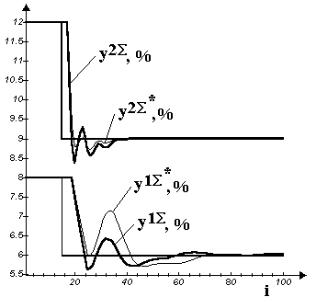
При сравнительной оценке качества управления несвязанной ЦСУ и одноконтурных схем (рис. 3.23), рассчитываемых отдельно по основным каналам, видно, что несвязанная схема обеспечивает лучшее качество управления за счет учета перекрестных связей в объекте при расчете цифровых регуляторов.
Рис. 3.23. Динамические характеристики систем управления концентрациями изоамиленов и изопентана на контрольных тарелках с
учетом перекрестных связей: y1 , y 2 - выходы объекта (несвязанная ЦСУ); y1 * , y 2 * - выходы объекта (одноконтурные схемы; настройки
регуляторов: q01 0,920878 , q11 1,653834, q12 0,768621 и q02 0,603545 , q12 0,797134 , q22 0,222656 )
120