

9.4. Сложение вращательных движений относительно пересекающихся осей
По аналогии с
предыдущим можно утверждать, что
результирующее движение будет мгновенно
вращательным относительно подвижной
оси, совпадающей с вектором мгновенной
угловой скорости
![]() (рис. 2.41). Величина и направление вектора
мгновенной угловой скорости может быть
найдена по правилу сложения векторов
(рис. 2.41). Величина и направление вектора
мгновенной угловой скорости может быть
найдена по правилу сложения векторов
|
|
(2.53) |
В данном случае точка О является неподвижной. Такое движение, при котором одна точка тела остается неподвижной, называется сферическим.
9.5. Сферическое движение тела
Для удобства назовем вращение тела относительно подвижной оси OAотносительным движением, а вращение вокруг неподвижной осиOB– переносным движением (рис. 2.42). Тогда величина и направление вектора абсолютной мгновенной угловой скорости будет определяться геометрической суммой векторов относительной и переносной угловых скоростей
|
|
(2.54) |
или
![]()
Пример 2.15.В планетарном редукторе водило 1 делает 9 об/мин. Определить угловую скорость колеса 2 относительно водила; радиус неподвижного колеса 3 в 1,5 раза больше радиуса колеса 2 (рис. 2.43).
Р ешение.Вектор относительной угловой скорости
колеса 2 направлен по оси водилаAB,
а переносной по сои 0A.
Вектор абсолютной угловой скорости
должен проходить через точкуC,
в которой подвижное колесо 2 соприкасается
с неподвижным колесом 3. Изложенное
позволяет построить параллелограмм
векторов угловых скоростей на основе
(2.54), из которого находим
ешение.Вектор относительной угловой скорости
колеса 2 направлен по оси водилаAB,
а переносной по сои 0A.
Вектор абсолютной угловой скорости
должен проходить через точкуC,
в которой подвижное колесо 2 соприкасается
с неподвижным колесом 3. Изложенное
позволяет построить параллелограмм
векторов угловых скоростей на основе
(2.54), из которого находим![]() .
.
Пусть n– число оборотов водила, тогда его
угловая скорость![]() .
Угол
.
Угол![]() найдем из соотношения радиусов подвижного
и неподвижного колес:
найдем из соотношения радиусов подвижного
и неподвижного колес:![]() .
.
Окончательно получим:
![]()
При решении задач удобнее пользоваться аналитическим методом, спроектировав уравнение (2.54) на оси координат.
|
Тогда
|
(2.55) |
 Угловое
ускорение мгновенного вращения равно
векторной производной от абсолютной
угловой скорости по времени
Угловое
ускорение мгновенного вращения равно
векторной производной от абсолютной
угловой скорости по времени
|
|
(2.56) |
| |
|
или
|
(2.57) |
| |
|
|
| ||
|
|
| ||
|
|
(2.58) | ||
Определение скоростей и ускорений точек тела при сферическом движении
Рассмотрим порядок решения таких задач применительно к произвольной точке М.
Скорость точки Mможно найти как произведение абсолютной угловой скорости на расстояние точки до оси вращения
|
|
(2.59) |
Вектор скорости
точки Mперпендикулярен
плоскости треугольникаOKMи направлен в сторону абсолютного
вращения Если задать положение точкиMрадиусом-вектором![]() ,
то вектор скорости точкиMможно определить векторным произведением
,
то вектор скорости точкиMможно определить векторным произведением
|
|
(2.60) |
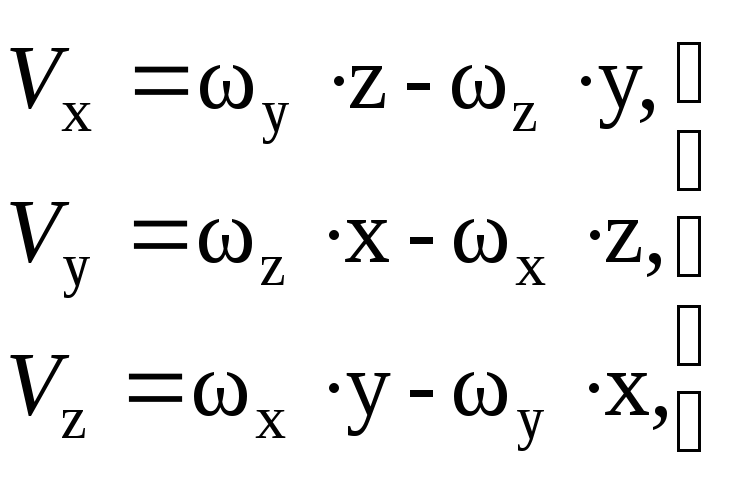
Проецируя (2.60) на оси координат получим:
|
|
(2.61) |
Для определения ускорения точки необходимо вычислить векторную производную от вектора скорости (2.60):
![]() или
или
|
|
(2.62) |
Первое слагаемое
![]() называется вращательным ускорением, а
второе
называется вращательным ускорением, а
второе![]() – осестремительным. Тогда
– осестремительным. Тогда
|
|
(2.63) |
9.6 Общий случай движения твердого тела
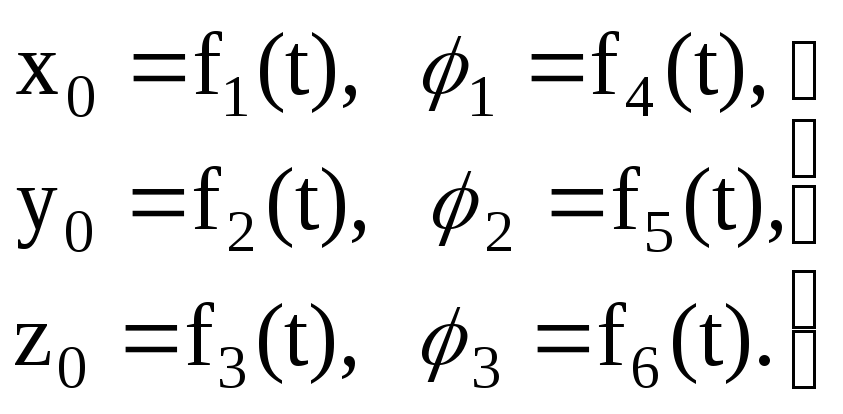
Движение тела в общем случае можно рассматривать как сложное, состоящее из поступательного движения вместе с некоторым центром О и сферического движения относительного данного центра. Таким образом уравнения движения тела в общем случае имеют вид:
|
|
(2.64) |
Скорость любой точки Mможно найти как геометрическую сумму скорости центра О от поступательного движения тела и ее скорости от сферического движения относительно центра О
|
|
(2.65) |
Заметим, что для равновесия тела в общем случае также необходимо выполнить шесть условий, при этом все уравнения (2.64) не будут зависеть от времени.