

9.2. Схемы и способы пуска и торможения сд
Конструкция современных двигателей приспособлена к условиям асинхронного пуска, и в настоящее время этот способ пуска является общепринятым.
В двигателе для обеспечения достаточного пускового момента Мп пусковая клетка имеет большое активное сопротивление. В ходе пуска пусковая клетка сильно нагревается, так как значительная часть мощности скольжения превращается в тепло. В связи с этим пусковые клетки выполняются из стержней сравнительно большого сечения с большой теплоемкостью. Для увеличения активного сопротивления при сохранении достаточно большой теплоемкости часто применяются стержни из бронзы, удельное сопротивление которой в ~ 5 раз больше удельного сопротивления меди.
Схемы пуска различаются главным образом способами включения статора и ротора. В зависимости от способа включения статора можно выделить следующие схемы (рис. 9.3), где а) схема непосредственного пуска; б) пуск через реактор; в) пуск через автотрансформатор; г) схема блока трансформатор-двигатель [1].
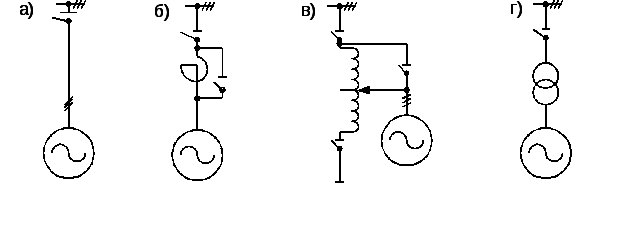
а) б) в) г)
Рис. 9.3. Схемы включения статора СД
В зависимости от способа подключения обмотки возбуждения выделяются следующие схемы цепи возбуждения (рис. 9.4), где а) с постоянно включенным возбудителем; б) с переключением на время пуска обмотки возбуждения на гасящее сопротивление; в) с последовательным включением гасящего сопротивления в цепь якоря возбудителя; г) с питанием обмотки возбуждения от выпрямителя [1].
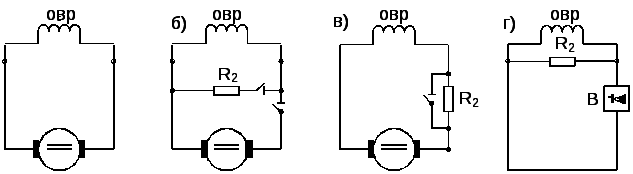
а) б) в) г)
Рис. 9.4. Схемы цепи возбуждения
Выбор той или иной схемы пуска определяется следующими факторами:
1) допустимым падением напряжения питающей сети во время пуска;
2) значением момента нагрузки двигателя во время пуска;
3) моментом инерции системы привода в целом;
4) максимально допустимым ускорением ведомой машины;
5) длительностью пуска;
6) свойствами самого двигателя, в особенности его механической и тепловой прочности;
7) стоимостью установки схемы пуска и экономичностью ее эксплуатации.
Для обеспечения правильного хода пуска применяются системы автоматического управления и соответствующие противоаварийные системы.
Система автоматического пуска производит подключение статора двигателя к питающей сети непосредственно или через реактор, или автотрансформатор, а также выполняет возможные переключения в цепи возбуждения. Эта система должна обеспечивать удобный в условиях эксплуатации пуск двигателя, например при помощи кнопки из нескольких различных мест, или по заданной программе, или по сигналу системы управления технологическим процессом.
Простейшей схемой пуска является непосредственный пуск с постоянно включенным возбудителем, и всегда, когда это только возможно, рекомендуется именно этот способ. По мере роста мощности питающих электрических сетей возможности применения непосредственного пуска все более расширяются.
Нарастание тока возбуждения должно быть только на заключительной стадии разгона двигателя; слишком раннее появление тока в обмотке возбуждения оказывает неблагоприятное влияние на ход асинхронного пуска, так как оно приводит к появлению тормозного момента, который увеличивает скольжение и затрудняет вхождение двигателя в синхронизм. Кроме того, постоянный ток, проходящий по обмотке возбуждения, во время асинхронного вращения вызывает пульсацию тока статора и связанные с этим колебания напряжения в менее мощных сетях – явление особенно неприятное в сетях с осветительной нагрузкой. В наиболее распространенном случае, когда возбудитель соединен с валом двигателя, процесс самовозбуждения возбудителя начинается только при некоторой определенной скорости, зависящей от величины сопротивления в цепи возбуждения возбудителя. Это может произойти, например, при скорости, равной примерно 60 % синхронной. Вследствие электромагнитной инерции нарастание возбуждения возбудителя происходит довольно медленно, своей полной величины возбуждение достигает только на последней стадии пуска, т.е. именно тогда, когда это нужно.
В случае возбудителей с отдельным приводом, когда двигатель, возбудитель и синхронный двигатель включаются одновременно, также можно создать условия, при которых самовозбуждение возбудителя соответствовало бы последней фазе пуска двигателя.
Задержка нарастания возбуждения достигается путем увеличения величины сопротивления в цепи возбуждения возбудителя. В системе автоматического пуска имеется возможность включения дополнительного сопротивления, закорачиваемого на заключительной стадии пуска. В тех случаях, когда для вхождения двигателя в синхронизм необходимо увеличение тока возбуждения (при пуске под нагрузкой для систем привода с большим моментом инерции J), автоматика должна обеспечивать форсирование возбуждения за счет временного закорачивания всех дополнительных сопротивлений в цепи возбуждения возбудителя.
В процессе пуска обмотку возбуждения СД не следует оставлять разомкнутой, так как при большом скольжении в ней индуцируется значительная ЭДС. Однако нельзя замыкать обмотку ОВ ротора накоротко или на малое сопротивление якоря возбудителя, т.к. вследствие явления однофазного включения в пусковой характеристике СД наблюдается снижение момента на половинной скорости, и пусковая характеристика будет иметь провал.
По обмотке
возбуждения будет протекать однофазный
переменный ток, создающий соответствующее
магнитное поле ротора. Это поле можно
разложить на две составляющие Ф1
и Ф2,
вращающиеся относительно ротора в
разные стороны с одинаковыми скоростями,
равными
![]() .
.
Поток Ф1 при этом будет вращаться относительно статора со скоростью [1]
![]() ,
(9.4)
,
(9.4)
а поток Ф2 со скоростью [1]
![]() .
(9.5)
.
(9.5)
Таким образом, магнитный поток Ф1 вращается со скоростью поля статора. Поток Ф2 при скорости ротора, меньшей 1/2ω0, будет вращаться в сторону, противоположную вращению ротора, что следует считать двигательным режимом; при скорости, большей 1/2ω0, вращение потока Ф2 будет происходить в ту же сторону, что и ротора, – режим будет генераторный.
Поэтому кривую момента, обусловленного взаимодействием потока Ф2 с полем статора, можно изобразить в виде кривой 3. Кривая 2 изображает момент, создаваемый взаимодействием потока Ф1 с полем статора, а кривая 1 – момент от пусковой обмотки (рис. 9.5).
Сложив эти три кривые, получим результирующую кривую 4, имеющую провал, подобный провалу на характеристике АД от высших гармоник МДС (проявился эффект Гёргеса).
Поэтому, если статический момент на валу СД значителен, может возникнуть устойчивый асинхронный режим (застревание ротора при малой скорости), и двигатель в синхронизм не войдет.
Уменьшить провалы в характеристике синхронного двигателя (явно нежелательные) можно увеличением сопротивления, на которое замыкается обмотка возбуждения при пуске.

Рис. 9.5. Механические характеристики при асинхронном пуске СД
Величина ограничивающего активного сопротивления должна составлять Rогр ≈ (8–10)Rов.сд. = Rгас. При этом ток в ней во время пуска будет меньше, соответственно меньше будет и максимум момента в генераторном режиме для кривой 3 (рис. 9.5).
Схема прямого пуска СД приведена на рисунке 9.6.

Рис. 9.6. Схема прямого пука СД
В современных системах пуска СД применяется, как правило, вариант с последовательным включением сопротивления в цепь возбудителя и изредка вариант с переключением на сопротивление.
Ток статора СД при асинхронном запуске превосходит номинальный ток примерно в 5 раз. Средством для уменьшения пускового тока является понижение напряжения на статоре с помощью реактора. Этот способ применяют тогда, когда требуется уменьшить динамические нагрузки на двигатель или же если сеть маломощная.
Если возникает необходимость ограничить потребляемый от сети ток при одновременном сохранении максимально возможного пускового момента, следует использовать автотрансформаторный пуск.
В случае реакторного
пуска для уменьшения вдвое потребляемого
от сети тока индуктивное сопротивление
реактора должно быть равно пусковому
сопротивлению двигателя. В результате
напряжение на двигателе будет равно
половине питающего напряжения, а момент
– ¼ момента, развиваемого двигателем,
подключенным непосредственно к сети.
При применении автотрансформатора для
снижения потребляемого от сети тока
вдвое его коэффициент трансформации
должен быть равен
![]() .
При этом напряжение на зажимах двигателя
составит 1/
.
При этом напряжение на зажимах двигателя
составит 1/![]() напряжения сети, а момент будет равен
половине значения момента при полном
напряжении питания.
напряжения сети, а момент будет равен
половине значения момента при полном
напряжении питания.
Различают легкий
и тяжелый пуск СД. При легком пуске
обмотка статора включена через реактор
до тех пор, пока скорость СД не станет
равной синхронной. При подсинхронной
скорости подается возбуждение, двигатель
втягивается в синхронизм при пониженном
напряжении, после чего реактор
закорачивают. Такой пуск применяют при
малых нагрузках на валу (![]() ).
).
При тяжелом пуске обмотка статора включена через реактор только до того времени, пока скорость двигателя не достигнет подсинхронной, затем реактор закорачивается и подают возбуждение – двигатель втягивается в синхронизм при полном напряжении. Такой пуск применяют при значительно большей нагрузке в сравнении с легким пуском.
При асинхронном пуске крупных синхронных двигателей иногда приходится считаться со значительным падением напряжения в питающей сети (на сопротивлениях трансформаторов и реакторах короткого замыкания). Поэтому в ряде случаев накладывают ограничения на проведение групповых пусков в системах автоматического включения резервного питания (системах АВР).
Напряжение при пуске двигателей должно оставаться таким, чтобы, во-первых, обеспечить достаточный для пуска вращающий момент, а во-вторых, не вызывать нарушений в работе других потребителей.
Ориентировочно можно считать, что если двигатель питается от осветительной сети и предполагаются частые пуски, то допустимы падения напряжения до 0,9 номинального значения. В случае питания двигателя непосредственно от линии высокого напряжения распределительной подстанции напряжение может падать даже до 0,7 номинального значения. Надо иметь ввиду, что применение пускового реактора повлечет за собой уменьшение напряжения на двигателе, что не выгодно для системы электропривода в целом. Чем больше будет напряжение на зажимах двигателя во время пуска под нагрузкой, тем меньше нагреются его обмотки. Как правило, максимально допустимой температурой пусковой клетки считается температура 300 °С. Для каждого типа двигателя заводы-изготовители указывают максимально допустимое число пусков повторных.
В последнее время для пуска СД постепенно начали внедрять тиристорные регуляторы напряжения.
Для торможения СД применяется режим динамического торможения, при котором обмотка статора замыкается на дополнительное сопротивление RД, а обмотка возбуждения подключается на постоянное напряжение (рис. 9.7а).
Механические характеристики синхронной машины в режиме динамического торможения аналогичны характеристикам асинхронной машины (рис. 9.7б).

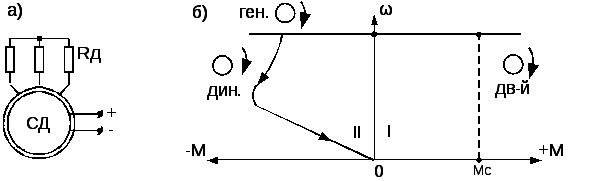
а) б)
Рис. 9.7. Схема динамического торможения СД (а) и его тормозные характеристики (б)
Торможение противовключением применяется редко, так как оно сопровождается большими толчками тока и ведет к усложнению аппаратов управления. Генераторный режим возможен, если ротор синхронного двигателя вращать от постороннего источника механической энергии. Механическая характеристика является продолжением во втором квадранте характеристики двигательного режима (рис. 9.7б).
Примечание. Ввиду того, что коллекторная машина постоянного тока ухудшает эксплуатационные качества привода, в последнее время, наряду с обычным СД, промышленность начала выпускать двигатели с дополнительными обмотками на статоре. Питание ОВ СД производится от полупроводникового выпрямителя (рис. 9.8).
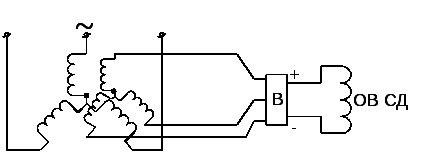
Рис. 9.8. Схема СД с дополнительными обмотками на статоре
Разработаны также типы СД без ОВ на роторе. Обмотка возбуждения укладывается на станине двигателя, что исключает возможность в контактной системе цепи возбуждения.
СД может работать и на пульсирующую нагрузку, например, поршневой компрессор. Однако при резко пульсирующих нагрузках использовать СД с опережающим cosφ нецелесообразно и даже опасно, т.к. колебания ротора могут совпасть с частотой тока сети, двигатель входит в механический резонанс, и наступает авария.
Чтобы избежать явления резонанса, частоту колебаний ротора следует уменьшить. Для этого повышают маховые массы электропривода с помощью подсоединения маховика или применяют двигатели с повышенным моментом инерции ротора. При подсоединении маховика нагрузочный график выравнивается, и уменьшается ток двигателя.