

8.2. Электромеханические характеристики ад
Для АД существуют
два типа характеристик:
![]() (S)
и
(S)
и
![]() (S).
(S).
Уравнение для второй электромеханической характеристики уже получено ранее в виде (8.13).
Ток ротора
![]() является основной величиной для оценки
работы двигателя.
является основной величиной для оценки
работы двигателя.
Ввиду отсутствия подробных данных о сопротивлениях двигателя, для построения электромеханической характеристики удобно воспользоваться параметрами, используемыми для построения механических характеристик двигателя по формуле Клосса (8.18).
Для анализа формы электромеханической характеристики ее уравнение (без вывода) можно представить в виде [1,2]
![]() .
(8.20)
.
(8.20)
Из формулы (8.20)
видим, что ток ротора интенсивно растет
при увеличении скольжения от нуля до
Sк.
При S=Sк
![]() .
При дальнейшем росте скольжения S
> Sк
ток
.
При дальнейшем росте скольжения S
> Sк
ток
![]() увеличивается медленно (рис. 8.4).
увеличивается медленно (рис. 8.4).
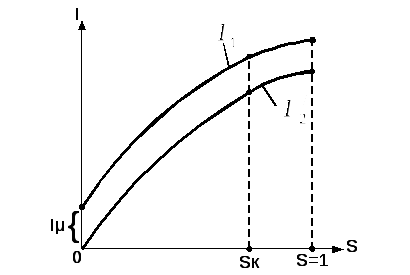
Рис. 8.4. Электромеханические характеристики АД
Для схемы замещения с вынесенным на зажимы сети контуром намагничивания ток намагничивания Iμ сохраняется неизменным во всех режимах. С достаточной степенью точности его можно считать чисто реактивным, пренебрегая потерями мощности на перемагничивание стали статора.
Ток
![]() определяется как [1,2,4]
определяется как [1,2,4]
![]() ,
(8.21)
,
(8.21)
где
![]() – коэффициент.
– коэффициент.
Для выпускающих
промышленностью машин значение
![]() лежит в пределах 0,4–0,8 и соответствующие
им токи
лежит в пределах 0,4–0,8 и соответствующие
им токи
![]() =
3–8. Поэтому в среднем
=
3–8. Поэтому в среднем
![]() 0,13–0,115.
Зависимости
0,13–0,115.
Зависимости
![]() и
и
![]() показаны на рис. 8.4.
показаны на рис. 8.4.
Необходимо обратить внимание, что при одинаковых значениях скольжения ток ротора в двигательном режиме меньше тока в генераторном режиме.
8.3. Определение кпд ад и ад
Коэффициент полезного действия (КПД) цепи ротора определяется из отношения части электромагнитной мощности, преобразуемой в механическую, к электромагнитной мощности:
![]() .
(8.22)
.
(8.22)
В частности, в номинальном режиме:
![]() .
(8.23)
.
(8.23)
Отсюда следует,
что с увеличением скольжения и увеличением
сопротивления
![]() КПД ротора снижается.
КПД ротора снижается.
Следует подчеркнуть, что значение КПД в выражении (8.22) не учитывает потери на перемагничивание стали статора и ротора, механические потери и потери, обусловленные высшими гармоническими составляющими. Указанные потери относительно невелики. Поэтому, как и для машины постоянного тока, приведенные выражения позволяют оценить значение КПД двигателя в целом.
Коэффициент мощности для главной цепи двигателя, без учета контура намагничивания, может быть определен следующим образом [1,2]:
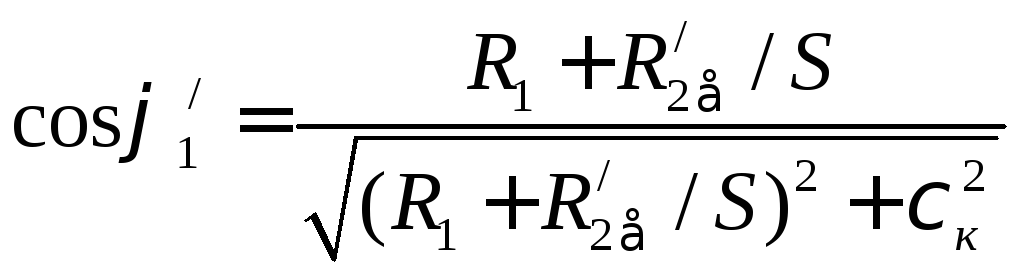 ,
(8.24)
,
(8.24)
С учетом контура намагничивания и используя параметры Sк и α двигателя , коэффициент мощности можно записать следующим образом [1,2]:
 .
(8.25)
.
(8.25)
Из анализа выражения
(8.25) следует, что
![]() при S=0,
т.е. в режиме идеального холостого хода
двигатели потребляют из сети чисто
реактивный ток намагничивания. При
увеличении скольжения коэффициент
мощности цепи статора сначала возрастает,
а затем снижается (рис. 8.5).
при S=0,
т.е. в режиме идеального холостого хода
двигатели потребляют из сети чисто
реактивный ток намагничивания. При
увеличении скольжения коэффициент
мощности цепи статора сначала возрастает,
а затем снижается (рис. 8.5).
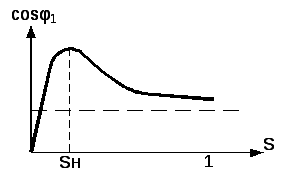
Рис. 8.5. Зависимость
![]() асинхронного двигателя от скольжения
асинхронного двигателя от скольжения