

9. Синхронные двигатели
9.1. Механические и угловые характеристики синхронного двигателя (сд)
Синхронные двигатели занимают в промышленных автоматизированных электроприводах значительное место и применяются главным образом для привода механизмов, скорость которых не требуется регулировать (компрессоры, вентиляторы, насосы, холодильные машины, преобразовательные агрегаты и т.д.) [1].
К достоинствам СД следует отнести простоту их конструкции по сравнению, например, с машинами постоянного тока, высокие энергетические показатели, определяющиеся в первую очередь компенсационными свойствами СД, относительно невысокую стоимость (СД большой мощности – выше 2000–3000 кВт дешевле асинхронных), возможность в будущем регулирования скорости и др.
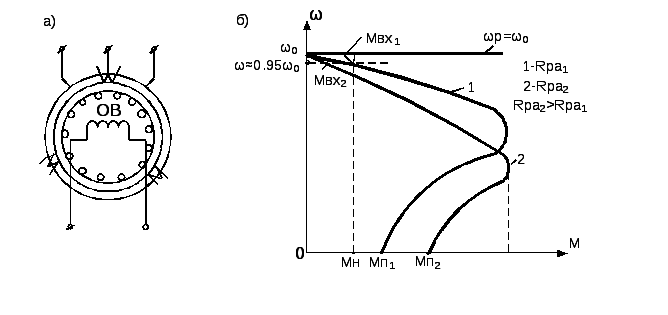
Схема включения СД приведена на рисунке 9.1а.
По конструктивному исполнению статор СД такой же, как и у АД. Ротор выполняется с двумя обмотками: пусковой обмоткой ОП типа беличьей клетки (как у асинхронного короткозамкнутого двигателя) и обмоткой возбуждения ОВ постоянного тока. Первая из обмоток служит для асинхронного пуска СД, вторая – для его возбуждения в нормальном режиме работы.
а) б)
Рис. 9.1. Схема включения синхронного двигателя (а) и механические характеристики (б)
Двигатель пускается
в ход как асинхронный. При скорости
![]() подается возбуждение, и двигатель
втягивается в синхронизм:
подается возбуждение, и двигатель
втягивается в синхронизм:
![]() .
.
СД выполняются с пусковыми клетками двух типов (с различными активными сопротивлениями Rра пусковой обмотки ротора), что позволяет получить различные пусковые механические характеристики (характеристики 1 и 2, рис. 9.1б).
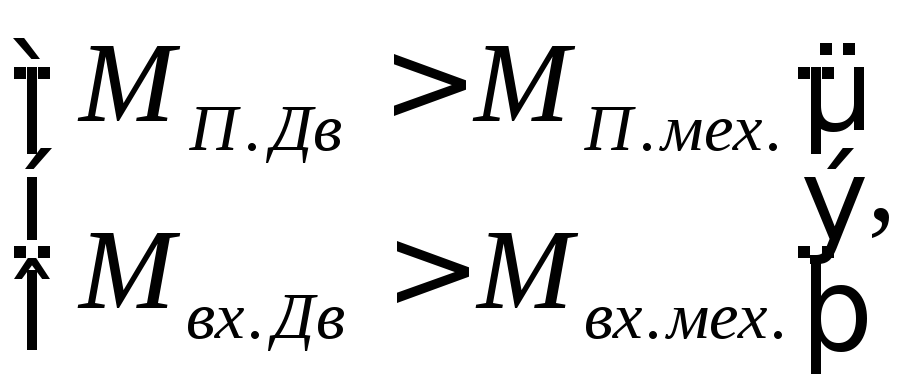
Выбор одной из двух указанных характеристик зависит от момента сопротивления производственного механизма. При пуске и вхождении двигателя в синхронизм необходимо выполнение условия [1,3]:
 (9.1)
(9.1)
где
![]() и
и
![]() – пусковые моменты двигателя и механизма
ИО;
– пусковые моменты двигателя и механизма
ИО;
![]() и
и
![]() – входные
моменты двигателя и механизма.
– входные
моменты двигателя и механизма.
Двигатели, у которых пусковая клетка выполняется с повышенным активным сопротивлением, применяются обычно с большим значением статического момента при пуске (характеристика 2). При вентиляторном характере статического момента более приемлемы двигатели с механической характеристикой 1.
Обратим внимание на то обстоятельство, что пусковые клетки СД рассчитываются на кратковременный режим их работы продолжительностью 20–30 с. Увеличение времени пуска выше допустимого может привести к перегреву клетки и ее повреждению.
Связь между скольжением и моментом СД при работе на пусковой клетке приблизительно выражается формулой как у обычного АД.
Рабочая механическая характеристика СД от холостого хода до выпадения из синхронизма является горизонтальной прямой, т.е. при изменении нагрузки на валу двигателя его скорость остается постоянной (рис. 9.1б).
Однако мгновенные
значения скорости ротора СД в процессе
работы могут несколько отличаться от
синхронной скорости
![]() ,
например, вследствие отставания ротора
от поля статора при увеличении нагрузки
на валу.
,
например, вследствие отставания ротора
от поля статора при увеличении нагрузки
на валу.
Для решения вопроса
об устойчивой работе двигателя в таких
случаях необходимо знать зависимость
развиваемого им момента от угла
внутреннего сдвига фаз между векторами
ЭДС статора и напряжения сети (![]() ).
Эта зависимость называется угловой
характеристикой СД. Приведем эту
зависимость в виде формулы (9.2) для
неявнополюсной машины [1]:
).
Эта зависимость называется угловой
характеристикой СД. Приведем эту
зависимость в виде формулы (9.2) для
неявнополюсной машины [1]:
![]() ,
(9.2)
,
(9.2)
В формуле (9.2):
![]() – фазная ЭДС статора;
– фазная ЭДС статора;
![]() – фазное напряжение сети;
– фазное напряжение сети;
![]() – угол внутреннего сдвига фаз;
– угол внутреннего сдвига фаз;
![]() – индуктивное сопротивление статора.
– индуктивное сопротивление статора.
Зависимость момента синхронного двигателя от угла внутреннего сдвига фаз (угловая характеристика 1) приведена на рисунке 9.2.
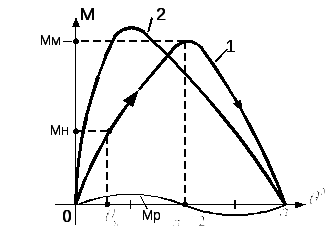
Рис. 9.2. Угловые характеристики СД
Наибольшего
значения момент двигателя достигает
при угле
![]() .
Эта величина характеризует собой
перегрузочную способность СД.
.
Эта величина характеризует собой
перегрузочную способность СД.
Увеличение угла
![]() более значения
более значения
![]() может привести к неустойчивой работе
двигателя и выпадению его из синхронизма.
При меньших значениях
может привести к неустойчивой работе
двигателя и выпадению его из синхронизма.
При меньших значениях
![]() его работа устойчива.
его работа устойчива.
Номинальный угол
сдвига фаз
![]() характеризует возможный длительный
режим работы двигателя по условиям
нагревания, следовательно, и его
номинального момента Мн. Перегрузочная
характеристика СД определяется как
характеризует возможный длительный
режим работы двигателя по условиям
нагревания, следовательно, и его
номинального момента Мн. Перегрузочная
характеристика СД определяется как
![]() .
.
Для механизмов с
переменной нагрузкой, особенно при
вероятности возникновения ее пиков,
применяются двигатели с высокой
перегрузочной способностью. В некоторых
случаях осуществляется автоматическое
увеличение ЭДС двигателя за счет
кратковременного его перевозбуждения,
что приводит к повышению
![]() и соответственно
и соответственно
![]() до 4.
до 4.
Следует также отметить, что СД менее чувствителен к снижению напряжения питающей сети, чем АД, так как момент СД пропорционален первой степени напряжения.
В явнополюсных СД реактивные сопротивления по продольной и поперечным осям не равны. Поэтому зависимость момента от угла внутреннего сдвига фаз имеет вид (для характеристики 2 рис. 9.2) [1]:
 ,
(9.3)
,
(9.3)
где
![]() и
и
![]() – реактивные сопротивления по продольной
и поперечной осям.
– реактивные сопротивления по продольной
и поперечной осям.
Второй член в приведенном выражении представляет собой значение реактивного момента. Из анализа формулы (9.3) следует, что явнополюсный СД может развивать некоторый момент и без возбуждения.
Следует отметить, что с погрешностью 10–20 % для крупных явнополюсных двигателей можно пренебречь составляющей реактивного момента и пользоваться выражением (9.2).