

методdocs_205
.pdf4.ПринципиальнаяэлектрическаясхемаПТПстроительногообъекта показывает распределение электроэнергии по потребителям с указанием взаимной связи основного электрооборудования, и представляет собой радиальную схему питания электропотребителей, которые создают распределенные нагрузки на РУ-НН.
5.В зависимостиотусловийтехническойэксплуатацииивозможных нештатных ситуаций нагрузки на трансформаторы ТП заданного объекта колеблются в широких пределах: от 468,72 до 1612,86 кВА.
Их внешние и рабочие свойства не остаются неизменными. Данные исследования внешних U2 Ε и рабочих Κ(Ε) характеристик трансформа- тораТМ-1000/10 приестественныхиискусственныхусловияхТПобъекта показали, что при компенсации реактивной энергии конденсаторами система электроснабжения имеет наиболее высокие технико-экономи- ческиепоказатели. Так, при30 %-номрасширениисистемаприискусст-
венных условиях и аварийной ситуации не испытывает перегрузкуΕ 0,937 , напряжение питания 512 В, КПД трансформаторов 0,985, тогда как при естественных условиях эти показатели при той же ситуа-
ции значительно хуже: U2(e) 505 B, КПД Κ(е) 0,982, а перегрузка достигает 61 %.
6. При номинальном режиме Ε 1 параметры трансформаторов тоже отличаются в зависимости от условий технической эксплуатации:
в естественных условиях U2(e)н |
501 В и КПД Κн(е) 0,981, а в искусст- |
|
венных условиях, с компенсацией реактивной энергии потребителей, |
||
U2(ин)U |
511 В и КПД Κн(и) |
0,985. |
7. |
Работа трансформаторов в режиме холостого хода (см. рис. 9.2 |
|
и 9.3) при коэффициенте Ε |
0,02 – 0,01 отличается тем, что их КПД |
|
становится значительно меньше номинальных значений и может быть равен Κ 0,82 – 0,96; в среднем это хуже номинальных значений при искусственных условиях в 1,2 раза, поэтому экономически нецелесообразна длительная работа трансформаторов в режиме холостого хода.
8. Увеличение числа трансформаторов при использовании менее мощных трансформаторов типа ТМ-250/10 потребует расширения основного электрооборудования, увеличения объема работ технического обслуживания, что ведет к снижению надежности ПТМ. Вывод из эксплуатации двух из пяти трансформаторов типа 250/10 связан с ограничениемнагрузкинаПТМс Ε 2,3 до Ε 1,6 , снижениемКПДипрактичес- ки нецелесообразен.
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 10
Анализ асинхронных электродвигательных устройств индивидуальных приводов системы рабочих механизмов
3-го класса по каталожным данным и выбор технических средств и мероприятий для их нормальной работы
Цели работы – определение параметров заданного электродвигательного устройства (ЭДУ) по каталожным данным. Построение его естественной механической характеристикии выбор технических средств и мероприятий для рационального использования ЭДУ при номинальной нагрузке.
Достичь поставленных целейлегче, если решить последовательно следующие задачи:
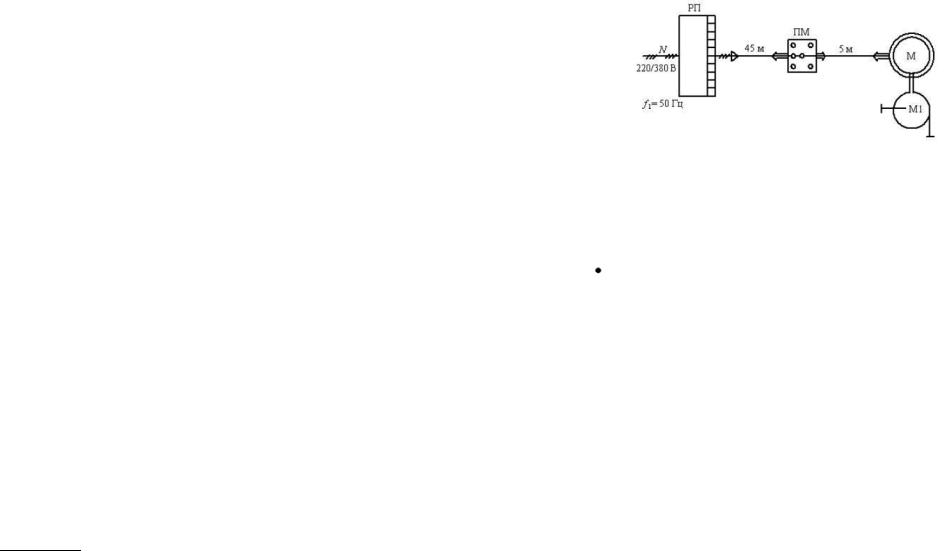
 определитьисполнениеЭДУ, егопригодностьдлязаданнойсистемы и схему соединения обмоток статора, если цеховая сеть имеет напряжение220/380 Впромышленнойчастотыf = 50 Гц, апомещениецеха относится к пыльным помещениям категории П-1;
определитьисполнениеЭДУ, егопригодностьдлязаданнойсистемы и схему соединения обмоток статора, если цеховая сеть имеет напряжение220/380 Впромышленнойчастотыf = 50 Гц, апомещениецеха относится к пыльным помещениям категории П-1;
 рассчитать параметры упрощенной Г-образной схемы замещения ЭДУ при номинальном режиме работы и построить его естественную механическую характеристику;
рассчитать параметры упрощенной Г-образной схемы замещения ЭДУ при номинальном режиме работы и построить его естественную механическую характеристику;
 выбрать тип и сечение питающего кабеля, если расстояние отраспределительногопункта(РП) дорабочихмеханизмовнепревышает 50 м, тип магнитного пускателя (ПМ) и устройства тепловой защиты и защиты от коротких замыканий в ЭДУ и силовых линиях питания
выбрать тип и сечение питающего кабеля, если расстояние отраспределительногопункта(РП) дорабочихмеханизмовнепревышает 50 м, тип магнитного пускателя (ПМ) и устройства тепловой защиты и защиты от коротких замыканий в ЭДУ и силовых линиях питания
(рис. 10.1);
 разработать привыявленнойнеобходимоститехнические мероприятия по регулированию напряжения питающей сети и компенсации реактивнойэнергии, еслизарациональноезначениекоэффициентамощности считать 0,92–0,95, и оценить экономическую эффективность принятых технических мероприятий, если в системе установлено 20 одинаковыхрабочихэлектромеханизмов, напримерэлектронасосов; выполнить принципиальную электрическую схему электроснабжения, управления
разработать привыявленнойнеобходимоститехнические мероприятия по регулированию напряжения питающей сети и компенсации реактивнойэнергии, еслизарациональноезначениекоэффициентамощности считать 0,92–0,95, и оценить экономическую эффективность принятых технических мероприятий, если в системе установлено 20 одинаковыхрабочихэлектромеханизмов, напримерэлектронасосов; выполнить принципиальную электрическую схему электроснабжения, управления
изащиты ЭДУ привода от коротких замыканий, длительной перегрузки
иот минимального напряжения сети;
 результаты обобщить и сделать выводы о наиболее эффективном технико-экономическом использовании системы рабочих электромеханизмов.
результаты обобщить и сделать выводы о наиболее эффективном технико-экономическом использовании системы рабочих электромеханизмов.
164 |
165 |
Вкачестве исходных данных принять: каталожные данные ЭДУ
вприл. 2 для помещений1 по своему варианту2; схему индивидуального электропривода порис. 10.1; коэффициент загрузкиЭДУ приноминаль-
ном режиме K3 1; потерю напряжения в кабельной линии не более 2,5 %; числочасов работы системы в рабочие сутки 24, а число рабочих суток в году по году выполнения РГР.
Алгоритм расчета
1. Каталожные данные электродвигателя типа А2-72-4:
мощность на валу двигателя Рн, кВт……………………….…... 28
скольжение Sн, %……………………….……………………… 3,35
коэффициент полезного действия Kн, %………………………. 90,00 коэффициент мощности соs Mн ……………………………..….. 0,89
отношение пускового к номинальному току I |
пуск |
I 1 |
K … |
5,5 |
отношение максимального момента |
н |
1 |
|
|
|
|
|
|
к номинальному Umax |
Mmax |
……………………………….... 2,1 |
|
||
|
Mн |
|
Двигатель имеет защищенное исполнение и выполнен в чугунном корпусе с лапами, а активное сопротивление фазы его статора при температуре 20 $С r1 0,08 Oм.
2. Пригодность двигателя для заданной системы и схема соединения статора (номинальное напряжение двигателя 220/380 В, а электрическая частота 50 Гц).
ТаккакдвигательА2-72-4 имеетзащищенноеисполнение, асистема размещена в помещении категории П-1, то устанавливать внутри помещения этот двигатель не разрешается. Здесь требуется двигатель закрытого или продуваемого исполнения. Однако если электродвигатель установить за пределами помещения и предусмотреть хорошую изоляцию от пыли и влаги, то защищенное исполнение вполне устроит.
1Помещениясповышеннойопасностьювотношениипоражениялюдейэлектрическим током при наличии проводящей пыли, влажности, сырости и токопроводящих полов (земляных, железобетонных и т. п.).
2Номер варианта РГР соответствует порядковомуномерутрехфазныхасинхронныхдвигателей единойсерии А2.
Напряжение цеховой сети (см. рис. 10.1) и обмоток статора заданного двигателя совпадают, поэтому обмотки статора следует соединить по схеме «звезда», а их начала – с отдельными фазами РП.
Рис. 10.1
3. Расчет параметров и построение Г-образной схемы замещения. 3.1. Скорость вращения ротора, частота ЭДС и тока в роторе при
номинальной нагрузке:
 число пар полюсов р 4 2 1 2 ; скорость вращения магнитного поля статора
число пар полюсов р 4 2 1 2 ; скорость вращения магнитного поля статора
Z0 |
2S f1 |
2S50 2 1 #157,08 c 1 ; |
|
p |
|||
|
|
 скорость вращения ротора двигателя
скорость вращения ротора двигателя
Zн (1 Sн)Z0 (1 0,0335) 157,08 151,82 с 1 ;
 частота колебаний ЭДС и тока в роторной обмотке f2н Sн f1 0,0335 50 #1,68 Гц.
частота колебаний ЭДС и тока в роторной обмотке f2н Sн f1 0,0335 50 #1,68 Гц.
3.2. Номинальныевращающиеэлектромагнитныймоментимомент на валу двигателя (воспользуемся универсальными зависимостями механических потерь от нагрузки – рис. 10.2):
номинальный вращающий момент на валу двигателя
Мн.в |
Pн |
|
28000 151,82 1 |
184,43 Н м. |
Qн |
||||
Из рис. 10.2 для двигателя А2-72-4 имеем |
||||
|
Uм |
'Рм.нРм1 0,4 %; |
||
номинальные механические потери двигателя |
||||
Рм.н |
UмРн 0,004 28000 |
112 Вт; |
||
166 |
167 |
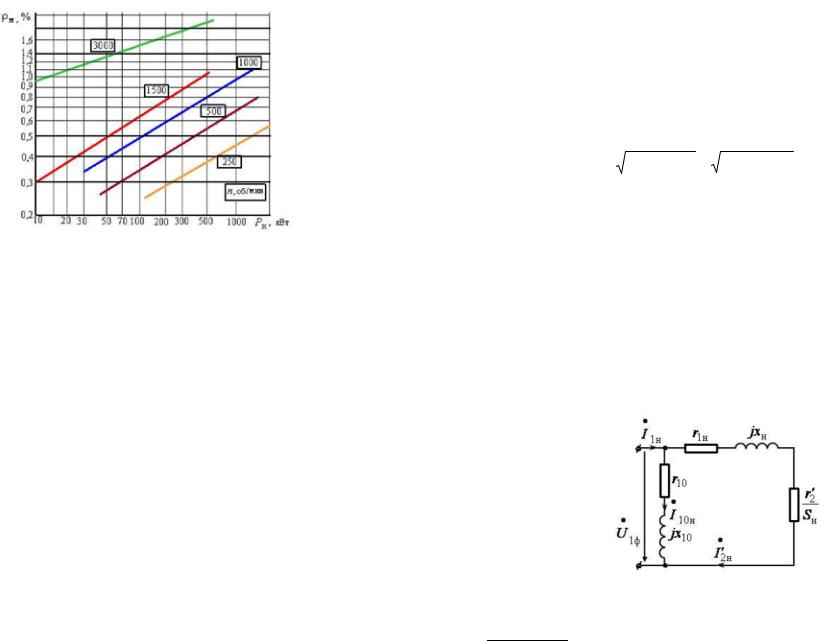
Рис. 10.2
номинальный вращающий момент электромагнитного происхождения
М |
|
(Р Р |
|
) Ζ 1 |
28000 112 |
185,17 Н м. |
|
|
151,82 |
||||
|
н |
н |
мм |
|
|
Примечание. Вращающий электромагнитный момент ЭДУ Мн по величине больше вращающего момента на валу за счет механических потерь энергии внутри электрического двигателя.
3.3. Пусковой и максимальный (критический) вращающие моменты ЭДУ.
Пусковой момент
Мпуск Υпуск Мн 1,2 185,17 222,2 Н м.
Максимальный, критический момент
Мmax Мн Εmax M н 2,1 185,17 388,85 Н м.
3.4. Полноеактивноеиреактивноевходныесопротивленияэквивалентной схемы замещения ЭДУ. Полное входное сопротивление схемы замещенияопределяетсяотношениемфазногонапряжения U1ф кфазному току I1н в отмотке статора ЭДУ.
Фазный номинальный ток статора
I |
Р (3 U |
1ф |
сosΜ |
н |
Κ ) 1 |
|
28000 |
# 52,96 А; |
|
|
|||||||
1н |
н |
|
н |
3 |
220 0,89 0,9 |
|
||
|
|
|
|
|
|
|
полное входное сопротивление (модуль) ЭДУ при номинальной нагрузке3
Z |
вх.н |
U |
1ф |
I 1 |
220 |
# 4,15 Ом; |
|
52,96 |
|||||||
|
|
1н |
|
активное входное сопротивление
|
|
rвх.н |
zвх.н сosΜн 4,15 0,89 # 3,69 Ом; |
|
|||||||
реактивное входное сопротивление (модуль) |
|
||||||||||
|
|
x |
z2 |
r2 |
4,15 3,642 # 1,9 Ом. |
|
|||||
|
|
вх.н |
вх.н |
|
вх.н |
|
|
|
|||
Комплексное выражение входного сопротивления составит: |
|||||||||||
|
|
|
|
|
Z вх.н |
rвх.н jxвх.н. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ξ |
Еслипринятьнулевойначальнуюфазунапряжения, т. е. U1ф U1ф, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
ξ |
|
то комплекс действующего значения входного тока I1н равен |
|||||||||||
|
|
ξ |
|
|
|
|
|
|
|
||
ξ |
|
U1ф |
220 |
|
|
220(3,69 j 1,9) |
|
|
|||
I |
1н |
|
|
47,139 j |
24,271 . |
||||||
|
|
|
|
|
|
||||||
Zвх.н |
3,69 j1,9 |
|
3,692 1,92 |
||||||||
3.5. Сопротивления элементов эквивалентной Г-образной схемы замещения при номинальном режиме работы ЭДУ (рис. 10.3).
Рис. 10.3
3 Полноевходноесопротивлениесхемызамещенияопределяетсяотношениемфазногонапряжения U1ф к фазномутокуI1н в отмоткестатораЭДУ.
168 |
169 |

Активное сопротивление фазы обмотки статора при температуре нагрева 75 °С следующее:
r1н [1 |
|
(Εн 20)] r1 |
|
|
[1 0,00428 (75 20)] 0,08 # 0,1 Ом; |
||||||||||||||||||||||||||||||||
расчетное сопротивление при максимальном вращающем моменте |
|||||||||||||||||||||||||||||||||||||
|
|
|
r |
|
|
1,5 U12ф |
|
|
r |
|
1,5 2202 |
|
|
|
|
0,1 1,09 |
Ом; |
||||||||||||||||||||
|
|
|
|
М |
|
|
|
Ζ |
|
388,85 157,08 |
|
||||||||||||||||||||||||||
|
|
|
|
max |
|
max |
0 |
|
|
|
1н |
|
|
|
|
|
|
|
|
||||||||||||||||||
расчетное сопротивление при номинальном моменте |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
r |
1,5 U12ф |
r |
|
|
|
1,5 2202 |
|
|
0,1 |
|
2,396 Ом; |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
М |
|
Ζ |
|
185,17 157,08 |
||||||||||||||||||||||||||||
|
|
|
|
н |
|
|
|
|
|
|
1н |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
н 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
реактивное сопротивление |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
x |
k |
(r |
2 |
|
r2 )0,5 |
(1,092 0,12 )0,5 |
1,09 |
|
Oм; |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
max |
|
|
1н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
приведенное активное сопротивление ротора |
|
|
|
|
|||||||||||||||||||||||||||||||||
r' |
S |
н |
(r2 |
r |
2 |
|
|
)0,5 |
|
|
0,0335 [2,396 (2,392 1,092 ]0,5 |
|
0,15 Ом; |
||||||||||||||||||||||||
2 |
|
|
н |
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
приведенный ток в ветви ротора при номинальном режиме ЭДУ |
|||||||||||||||||||||||||||||||||||||
(модуль) икомплекс действующегозначения |
|
ξ |
|
равнысоответственно: |
|||||||||||||||||||||||||||||||||
Iχ |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
U1ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2н |
|
|
|
|
|
|
|||||||
ξ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
220 |
|
|
|
|
|
|
|
44,08 j 10,647; |
|||||||||||||
χ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
I2н |
|
(r1н r2' Sн1)2 jхk |
|
|
|
|
0,15 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
(0,1 0,0335) j |
1,09 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
' |
|
|
|
|
U1ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,15 |
|
|
|
2 |
|
|
2 |
0,5 |
|
|||||||
I2н |
|
|
220[(0,1 |
|
) |
|
1,09 |
|
] |
|
46,36 А; |
||||||||||||||||||||||||||
[(r1н r2' Sн1)2 хk2 ]0,5 |
0,0335 |
|
|
|
|||||||||||||||||||||||||||||||||
комплексдействующегозначениятокавветвинамагничиванияпри |
|||||||||||||||||||||||||||||||||||||
номинальном режиме (по 1-му закону Кирхгофа) |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ξ |
|
|
|
|
ξ |
|
|
ξ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
I10н |
|
|
|
|
|
|
|
|
|
χ |
|
|
3,059 j 13,804 A , |
|
|
|
||||||||||||||
а его модуль |
|
|
|
|
I1н I2н |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
I10 н |
14,139 |
А; |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
активнаямощностьЭДУвноминальномрежимеирежимехолостого хода для одной фазы
|
|
I 2 |
|
|
|
|
|
|
|
|
r' |
) I '2 |
|
P |
r |
U |
I |
cos Μ |
|
|
(r |
|
2 |
||||
|
Sн |
||||||||||||
10 |
10 10 |
1ф |
1н |
|
|
н |
|
1н |
|
2н |
|||
220 |
52,96 0,89 (0,1 |
0,15 |
) 46,362 |
531,14 Вт; |
|||||||||
0,0335 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
реактивная мощность одной фазы ЭДУ в режиме холостого хода
Q |
x |
|
I 2 |
|
U |
1ф |
I |
sin Μ |
н |
x |
k |
I '2 |
|
10 |
10 |
10 |
|
|
1н |
|
|
|
2н |
||||
220 52,96 0,46 1,094 6,362 |
|
3016,87 ВАр; |
|||||||||||
полная мощность фазы ЭДУ в режиме холостого хода |
|||||||||||||
S |
P2 |
Q2 |
|
|
531,142 3016,872 |
3063,27 BA; |
|||||||
10 |
10 |
|
10 |
|
|
|
|
|
|
|
|
|
|
ток холостого хода из формулы полной мощности |
|||||||||||||
|
I |
|
S U 1 |
3063,27 220 1 |
|
13,92 А; |
|||||||
|
10 |
|
10 |
1ф |
|
|
|
|
|
|
|
|
|
коэффициент мощности ЭДУ при его холостом ходе |
|||||||||||||
сosΜ |
|
p |
|
S 1 |
531,14 3063,27 1 0,11; |
||||||||
|
10 |
10 |
|
10 |
|
|
|
|
|
|
|
||
полноесопротивлениеконтуранамагничиванияЭДУприхолостом
ходе
z |
U |
I 1 |
220 13,92 1 15,8 Ом; |
10 |
1ф |
10 |
|
то же, но при номинальном режиме
z |
U |
I 1 |
220 14,139 1 15,56 Ом; |
10н |
1ф |
10н |
|
активное сопротивление контура намагничивания
r |
P |
I 2 |
531,14 13,92 2 |
2,74 Ом; |
10 |
10 |
10 |
|
|
реактивное сопротивление контура намагничивания Г-образной схемы замещения ЭДУ
x |
z2 |
r2 |
15,82 2,742 15,56 Ом. |
10 |
10 |
10 |
|
3.6. Активная мощность потребления энергии ЭДУ и мощность потерь энергии в нем при номинальной нагрузке Мн.
Активная мощность потребления энергии ЭДУ при его номинальной нагрузке составляет
Р1н |
Рн |
28 000 |
31 111,11 Вт. |
|
Κн |
|
0,9 |
||
Номинальная величина электромагнитной мощности, создаваемая ЭДУ в рабочем зазоре,
Р |
(Р |
Р |
)(1 |
S |
н |
) 1 |
э.м.н |
н |
м.н |
|
|
|
|
(28 000 112)(1 0,0335) 1 |
29 086,39 Вт. |
|||||
170 |
171 |
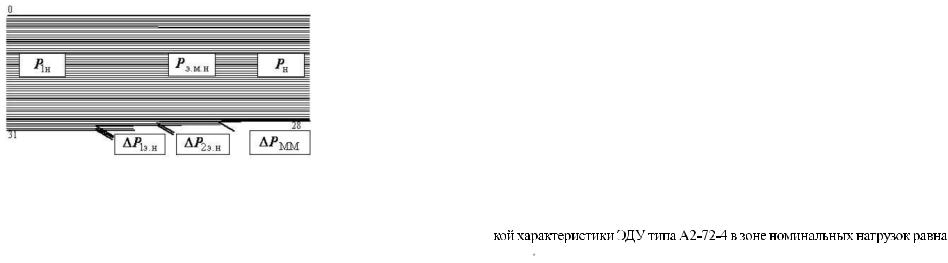
Мощностьэлектрическихпотерьвротореприноминальнойнагрузке
'P2э.н Pэ.м.н Sн 29 086,39 0,0335 974,39 Вт.
Мощность потерь энергии в обмотке и железе статора ЭДУ с учетом потерь рассеяния в рабочем воздушном море
'P1э.н P1н Pэ.м.н 31 111,11 29 086,39 2024,72 Вт .
Диаграмма мощностей преобразования энергии в ЭДУ при номинальной нагрузке Мн представлена на рис. 10.4. Из нее видно, что наибольшееколичествоэнергиитеряетсявстаторедвигателя, асравнительнонезначительноеколичествоэлектроэнергиирасходуетсяна покрытие потерь в подшипниковых опорах и потерь на трение о воздух.
Рис. 10.4
4. Расчет и построение естественной механической характеристики ЭДУ.
4.1. В качестве исходного соотношения для расчета естественной механическойхарактеристикипримемзависимостьвращающегомомента ЭДУ в функции его скольжения (выражение получено с учетом эквивалентной схемы замещения, представленной на рис. 10.3; см. также комментарий в конце работы).
|
|
|
3 U 2 |
r ' |
S 1 |
|
|
|
М (S ) |
|
|
|
1ф |
2 |
|
|
, |
Z |
0 |
[(r |
r ' |
S |
1)2 x2 |
] |
||
|
|
1н |
2 |
|
k |
|
|
|
где U1ф |
220 B; r |
0,1 |
Ом; |
r' |
0,15 Ом; |
Z 157,08 c 1 |
; |
||||
|
1н |
|
|
|
|
|
2 |
|
|
0 |
|
xk 1,09 |
Ом; Sн 0,0335. |
|
|
|
|
|
|
|
|||
4.2. Механическую характеристикувида Z M получим, если вос- |
|||||||||||
пользуемся выражением |
S |
( |
Z |
0 |
Z Z 1. |
|
|
||||
|
|
|
|
|
) |
0 |
|
|
|||
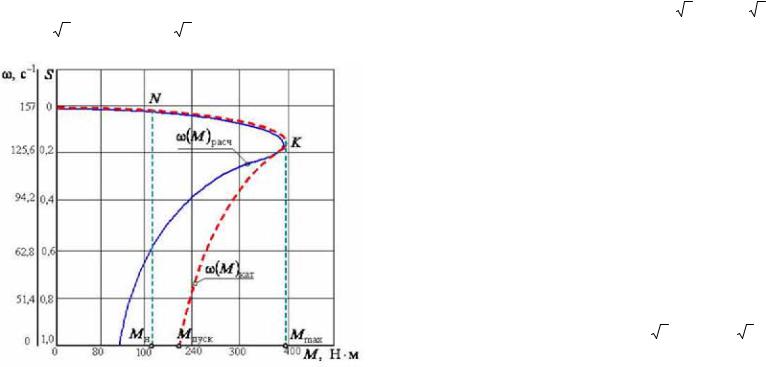
4.3. Результаты расчетов S M и Z M приведены на рис. 10.5, изкотороговидно, чтохарактеристикавинтервалескольжений 0 d S d Sн почти прямолинейна.
4.4. Проверку правильности расчета и построения механической характеристики ЭДУ произведем по координатам точек отдельных ре-
жимов работы двигательного устройства. |
|
|
||||||
Перваяточка: М |
0; Z |
Z |
|
157,08 с 1 |
– режим холостогохода. |
|||
|
|
|
|
0 |
|
|
Zн 151,82 с 1 – номи- |
|
Втораяточка: М |
Мн |
185,17 Н м; Z |
||||||
нальный режим работы ЭДУ. |
|
|
|
|
|
|
||
Третья точка: М |
Мн |
Мmax |
388,85 Н м; |
|||||
Z |
Z #135,00 |
c 1; S |
S |
к |
– критический режим работы. |
|||
|
к |
|
|
|
|
|
|
|
Четвертая точка: М Мпуск |
232,2 |
Н м !113,2 Н м; Z 0. |
||||||
Из |
последней |
точки |
|
следует, |
что |
каталожные данные |
||
Мпуск # 232 Н м более чем в 1,96 разпревышают расчетные, а расчетный пусковой момент меньше номинального в 1,65 раза. Такое несоот-
ветствие можно объяснить использованием упрощенной схемы замещения и приближенного выражения для момента на валу ЭДУ при расчете зависимостей Z М и S M .
С другой стороны, можно утверждать, что выражение достаточно точноописываетрабочуючастьмеханическойхарактеристикидвигательного устройства в естественных условиях.
Изрис. 10.5 такжеследует, чтожесткостьестественноймеханичес-
29,8 Нм/с. Пунктирнойкривойпоказанахарактеристикапокаталожным данным.
5. Выбор типа и сечения питающего силового кабеля.
Для помещений категории П-1 должны применять защищенные виды электропроводок, изоляция которых выдерживает напряжение на менее0,5 кВ. Допускаетсяпрокладыватьбронированныекабелиилипровода и кабели в трубах. В качестве переносных могут использоваться гибкие провода и кабели типа КРПС или КРПТ. Расстояние от РП домагнитногопускателяПМ(см. рис. 10.1) составляет45 м. Кабельпроложен открыто в канале.
5.1. Выбираемтрехжильныйалюминиевыйкабельсрезиновойизоляцией типа АСРБГ или АВРБГ (прил. 2). Реактивным сопротивлением жил кабеля пренебрегаем.
172 |
173 |
5.2. Рабочий ток двигателя |
|
|
|||||
Ip |
I1н |
|
Рн |
|
31 111,11 |
53,11 А. |
|
3 |
UлсosΜн Κн |
3 380 0,89 0,9 |
|||||
|
|
|
|||||
Рис. 10.5
5.3. Допустимыйтокжилыкабеля I доп долженбытьбольшерабочего тока I р . По таблице длительно допустимыхнагрузокв А(см. прил. 2) имеем:
Iдоп 60,0 А ! Ip 53,11 A для сечения жилы 16 мм2 – АСРБГ3 16. 5.4. Проверкасеченияжилкабеляпопотеренапряженияприноми-
16. 5.4. Проверкасеченияжилкабеляпопотеренапряженияприноми-
нальной нагрузке. Сопротивление одной жилы
R L(ϑ s) 1 |
45 |
0,09 Oм, |
|
|
|||
л |
32 |
16 |
|
|
|
||
где ϑ –удельнаяпроводимостьматериала–дляалюминия ϑ 32 м/мм2 Ом; потери напряжения на фазу
Uф Rл Iр cos Μн 0,09 53,11 0,39 4,15 В;
потери линейного напряжения |
|
|
U 2 |
3 Uф |
3 4,15 7,2 В; |
u % ( U2 U2 1)100 % |
(7,2 380 1)100 % 1,89 %. |
|
Потери напряжения допускаются не более 2,5 %, следовательно, кабель выбран правильно. В противном случае сечение жил кабеля увеличивают.
5.5. Мощность и коэффициент мощности в начале линии. Потеря мощности в кабеле при номинальной нагрузке
Рл 3 RлIp2 3 0,09 53,112 761,58 Вт.
Мощностьвначалекабельнойлинии(наклеммахРП, см. рис. 10.1)
Pc P1н Рл 31 111,11 761,58 31 872,67 Вт.
Действующеезначениенапряжениявначалелинии(наклеммахРП) должно быть не менее
Uc Uл U2 380 7,2 387,2 B.
Коэффициент мощности в начале питающей кабельной линии
сosΜ |
|
Pc |
31872,69 |
0,89. |
|
|
Uc Ip |
|
|
||
3 |
3 387,2 53,11 |
|
|||
6. ВыбормагнитногопускателяисредствазащитыЭДУотдлительной перегрузки, минимального напряжения и токов короткого замыкания.
6.1. Потаблицемагнитныхпускателей(прил. 7) сучетомноминального режима работы двигателя ( Pн 28 кВт , U 380 B и Iн
Iр # 53 А) выбираем нереверсивный пускатель типа П-422 в защи-
щенном исполнении на номинальный допустимый ток 90 А.
Защиту от минимального напряжения в этом пускателе выполняет катушка, котораярассчитанананапряжениесрабатыванияUср δ 0,75Uн.
6.2. По таблиценагревательных элементов(прил. 8) сучетомпараметров выбранного магнитного пускателя П-422 имеем для номинального рабочеготока электродвигателя Iн 53 A и пускателя4-йвеличи- ны номер нагревательного элемента 48, который защищает ЭДУ от длительных перегрузок со стороны рабочей машины. Эти перегрузки представлены электрическим током в обмотке статора; при выбранном элементе находятся в пределах 50–55 А.
174 |
175 |
6.3.Выбор плавких предохранителей (см. рис. 10.1, установлены
вРП) для защиты ЭДУ от токов короткого замыкания.
Максимальныйток в жиле кабеля в момент пуска двигателя
Imax k1 Ip 5,5 53,11 # 292,11 A.
Условие, прикоторомплавкаявставкапредохранителястоком Iвст за время пуска двигателя не расплавляется,
Iвст ! 0,4 Imax.
Номинальныйтокплавкойвставкивыбираем(прил. 3) сучетомусловия расплавления вставки:
0,4 Imax 0,4 292,11 |
116,84 А; |
|
Iвст |
120 А. |
|
Проверка условий соответствия электрозащиты от коротких замы- |
||
каний по коэффициенту соответствия K |
0,33 |
|
k0 Iвст |
0,33 420 |
39,6. |
Следовательно, допустимый ток кабеля |
||
Iдоп 60 A ! k0 Iвст |
39,6 А, |
|
иусловие соответствия защиты от коротких замыканий выполняется.
7.Технические мероприятия по поддержанию потерь напряжения в питающих кабельных линиях, не превышающих 2,5 %.
Припотерелинейногонапряженияменее 2,5 % разрабатывать специальные технические мероприятия не требуется. При большей потере напряжения требуется регулировать напряжение на распределительном пункте или на трансформаторной подстанции так, чтобы оно было в допустимыхпределах. Этогоможнодостичьеслине увеличениемсечения жил кабельной линии, то переключением обмоток трансформаторов, питающей цеховой или заводской трансформационной понизительной станции или установкой специальных стабилизаторов напряжения.
8.Определение реактивной мощности и разработка технических мероприятий по компенсации сдвига фаз между электрической нагрузкой и напряжением.
Воспользуемся номинальной нагрузкой (см. алгоритм расчета, п. 1) электромеханизма (см. рис. 10.1). Случай, близкий к реальному
(см. тамжеп. 2), т. е. прикоэффициентеспроса Kc 0,7 икоэффициенте мощности cosΜ2 0,8 для механизмов 3-го класса.
8.1. Полная мощность потребления электрической энергии из сети
S |
|
P cos Μ 1 |
31,8769 0,89 1 |
35,81 кВА; |
|
1 |
c |
|
|
|
|
S |
2 |
P cos Μ 1 |
31,8769 0,8 1 |
39,84 кВА. |
|
|
c |
2 |
|
|
|
8.2. Реактивная мощность потребления энергии из сети индуктив- |
|||||
ного характера |
|
|
|
|
|
Q |
S 2 |
P2 |
35,812 31,872 |
16,33 кВАр; |
|
|
L1 |
1 |
с |
|
|
Q |
L2 |
S 2 |
P2 |
39,842 31,872 |
23,90 кВАр. |
|
2 |
с |
|
|
|
Для полной компенсации сдвига фаз между электрическим током |
|||||
Iн и напряжением при номинальной нагрузке необходимо предусмотреть в районе РП установку конденсаторов (или синхронных компенса-
торов) намощность Qc1 |
16,33 кВАр, авслучае2 – 23,90 кВАр. Вклю- |
||||||||||||||||||
чение конденсаторов осуществим по схеме «звезда». |
|||||||||||||||||||
8.3. Ток в фазе цепи конденсаторной установки при сosΜ 0,89; |
|||||||||||||||||||
сosΜ2 |
|
0,8 и при sinΜ |
0,46 ; sin Μ2 |
0,6: |
|
|
|||||||||||||
I |
c1 |
Q |
( |
3 U |
c |
sin Μ) 1 |
16,33( |
3 387,20 0,46) 1 # 0,05 кA ; |
|||||||||||
|
c1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
I |
c2 |
Q |
( |
3 U |
c |
sin Μ |
2 |
) 1 |
23,4( |
3 387,20 0,6) 1 # 0,06 кA . |
|||||||||
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
8.4. Емкость конденсаторов в фазной ветви |
|||||||||||||||||||
|
|
Сф1 |
|
|
|
|
|
Ic1 |
|
|
|
|
|
0,05 10 3 |
|
411,04 мкФ; |
|||
|
|
|
2 Σ f |
U |
c |
2 Σ 50 387,2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
|
|
Сф2 |
|
|
|
|
|
Ic2 |
|
|
|
|
|
|
0,06 10 3 |
|
493,25 мкФ. |
||
|
|
|
2 Σ f1 |
Uc |
|
2 Σ 50 387,2 |
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
9. Принципиальнаяэлектрическаясхема электромеханизмас асинхронным ЭДУ типа А2-72-4 с компенсатором сдвига фаз представлена на рис. 10.6, где А, В, С– фазы шин РП; QF1 – автоматическийвыключатель компенсатора; СВ – трехфазный конденсатор типа КМ-0,23-18-3 (см. прил. 5); f1 W1 – кабельдли-
W1 – кабельдли-  16; SВ1, SВ2 – выключателикнопочныесоответственно «Стоп», «Пуск»; КМ – контактор магнитного пускателя П-422; КК1, КК2 – тепловые реле магнитного пускателя; М – двигатель; РМ – рабочая машина.
16; SВ1, SВ2 – выключателикнопочныесоответственно «Стоп», «Пуск»; КМ – контактор магнитного пускателя П-422; КК1, КК2 – тепловые реле магнитного пускателя; М – двигатель; РМ – рабочая машина.
176 |
177 |
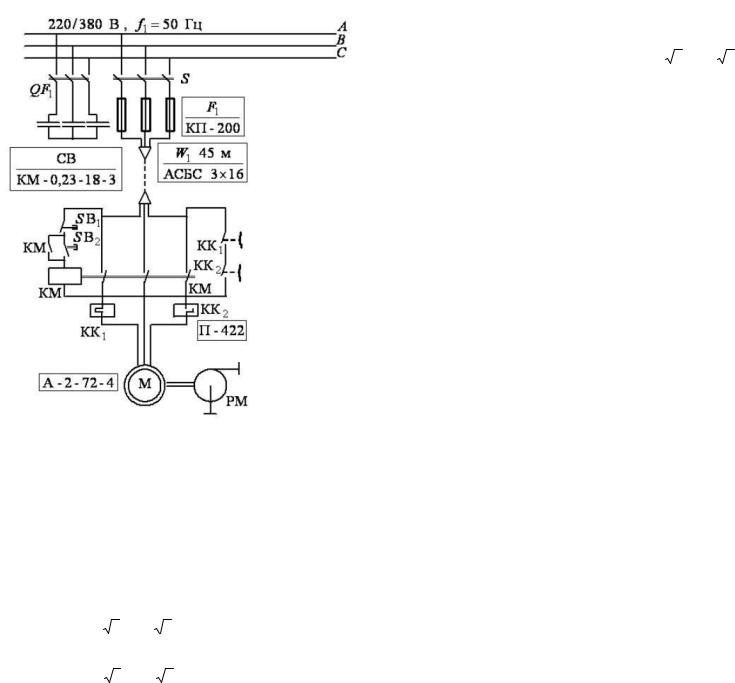
Рис. 10.6
10. Годовойэкономическийэффектотустановкикомпенсатора, если электромеханизмы будут работать при номинальной нагрузке и нагрузке, близкой к реальной (случай 2), по 24 ч в рабочие сутки.
10.1. Число рабочих часов в году, например при 306 рабочих днях
А 24 306 7344 ч.
10.2. Среднее действующее значение тока в линии: до установки компенсатора (случай 1)
|
S |
35,81 103 |
|
|
||
I1 |
1 |
|
|
|
53,46 A ; |
|
3Uc |
3 387,2 |
|
||||
|
|
|
||||
I2 |
S2 |
|
39,84 103 |
58,91 A ; |
||
3Uc |
3 387,2 |
|||||
|
|
|||||
после установки компенсатора, когда cos Μ 1,
|
P |
31,82 103 |
|
||
Ik |
с |
|
|
47,58 A . |
|
3Uc |
3 387,2 |
||||
|
|
||||
10.3.Уменьшение потерь активной мощности в линиях системы
иэкономия электроэнергии в системе.
Примечание. Потеря активной мощности в линиях и сетях определяется по формуле
Р |
1,1 n ΥI |
2 L |
10 |
3 |
кВт, |
|
|
S |
|
||||
|
|
|
|
|
|
|
где 1,1 – коэффициент, учитывающий сопротивление переходных контактов, скрутку жил и способ прокладки линий; n – число фаз в кабельной линии; I – действующее значение тока в линии, А; Υ – удельное со-
противление материала жилы и кабеля: Υ ϑ 1 0,0312 мм Ом/м; L – длина кабельной линии от РП до двигателя, м.
Тогда уменьшение потерь мощности в линиях одной установки
P |
1,1 n Υ |
L |
(I 2 |
I 2 ) 10 3 |
|
|
|||
S |
|
|
|||||||
1 |
|
|
|
1 |
k |
|
|
||
1,1 3 0,0312 |
50 |
|
(53,462 47,582 ) 10 3 |
0,19 |
кВт; |
||||
16 |
|
||||||||
|
|
|
|
|
|
|
|||
P |
1,1 n Υ |
L |
(I 2 |
I 2 ) 10 3 |
|
|
|||
|
|
|
|
||||||
1 |
|
|
|
S |
2 |
k |
|
|
|
|
|
|
|
|
|
|
|
||
1,1 |
3 0,0312 |
50 |
|
(58,912 47,582 ) 10 3 |
0,39 |
кВт, |
|||
|
|
||||||||
16 |
|
||||||||
аэкономияэлектрическойэнергиизарабочийгодсистемойиз20 рабочих электромеханизмов 3-го класса
6W1 |
20 P1 A |
20 0,19 7344 |
27 907,2 кВт-ч; |
6W2 |
20 P2 A |
20 0,39 7344 |
57 283,2 кВт-ч. |
10.4.Годовой экономический эффект, если стоимость 1 кВт-ч
с0,9 р. кВт-ч, составит
С1 |
с 6W1 |
0,9 27 907,2 |
10 026 р.; |
С2 |
с 6W2 |
0,9 57 283,2 |
51 555 р. |
178 |
179 |
Обобщение |
в этом случае достигает более 57 МВт-ч, а годовой экономический эф- |
|
Надежная работа электрических двигателей зависит не только от |
фект в денежном выражении – суммы более 51 555 р. |
|
Выводы |
||
правильного выбора мощности, но и от выбора их конструктивного ис- |
||
полнения, котороедиктуетсятребованиямитехникибезопасностиипро- |
|
|
тивопожарнойтехники, атакжезависитотправильнойсхемыподключе- |
1. Электродвигательное устройство в приводе при техническойэк- |
|
ния ЭДУ к питающей сети. Если электрический двигатель типа А2-72-4 |
сплуатации должно быть загружено номинально и иметь коэффициент |
|
вусловияхзаданнойсетиподключитьпосхеме«треугольник», тоонне- |
мощности по величине не ниже 0,92…0,95, если желать экономичного |
|
пременно выйдет из строя, так как на его фазах вместо рассчитанного |
использования электрической энергии. |
|
номинального напряжения 220 В будет действовать 380 В. |
2. Надежная работа ЭДУ будетв томслучае, если его конструктив- |
|
Характер и количественные показатели работы электродвигателя |
ное исполнение выбрано верно, а схема соединения обмотки статора |
|
приноминальномрежимерабочегомеханизмавидныизрезультатоврас- |
выполнена с учетом напряжения заданной сети. |
|
чета параметров Г-образной схемы замещения ЭДУ. При частоте тока в |
3. Правильный выборпитающегокабеля, а также средствуправле- |
|
статоре50 ГцчастотаЭДСитокавобмоткеработающегороторасостав- |
нияи защиты ЭДУ от длительной перегрузки итоковкороткого замыка- |
|
ляет всего 1,68 Гц. Номинальный вращающий момент на валу незначи- |
нияпозволяетиметьнадежную, безопаснуюидолговечнуюсистемуэлек- |
|
тельноотличается от электромагнитного (всего на 0,4 %), поэтомусрав- |
троприводов, котораяобеспечит требуемую производительность и каче- |
|
нительно простопостроенаестественнаямеханическаяхарактеристика, |
ство продукции. |
|
которая показала несоответствие пусковых расчетных данных каталож- |
4. Установка компенсатора реактивной энергии в систему электро- |
|
ным и позволила предложить технику пуска такого двигателя с нагруз- |
снабженияасинхронныхэлектроприводоврабочихмашинимеханизмов |
|
кой не более 60 % от номинальной. Коэффициент мощности асинхрон- |
экономит электроэнергию за счет уменьшения потерь мощности в ка- |
|
ного ЭДУ при холостом ходе очень мал (0,11), но реактивная мощность |
бельных линиях и повышает производительностьэлектромеханизмов за |
|
значительна и достигает более 3 кВАр. Потери активной мощности |
счет уменьшения падений напряжения между источником и потребите- |
|
вдвигателевбольшеймеренаблюдаютсявстаторе (более2 кВт), значи- |
лем электроэнергии, что равносильно повышению величины напряже- |
|
тельноменьшиепотери(около0,98 кВт) – вобмоткеротора, потеримощ- |
нияназажимахобмоткистатораи, какследствие, квадратичномуувели- |
|
ности в механической части незначительны и составляют величину ме- |
чению вращающего момента ЭДУ. |
|
нее 120 Вт. |
5. Анализ асинхронных двигателей по их каталожным данным по- |
|
Надежная работа установки определяется правильным выбором |
зволилкомплекснонаоснованиипараметровГ-образнойсхемызамеще- |
|
кабеля, магнитногопускателяи предохранителей, типкоторыхвполной |
нияизучитьмеханическиехарактеристики, процесспреобразованияэнер- |
|
мере зависит от расчетных параметров ЭДУ. Даже на длине кабеля 45 м |
гии, выбратьсечениежилкабеляэлектроснабжения, средствуправления |
|
наблюдаютсяпотеринапряжения(более7 В) имощности(более0,7 кВт). |
изащитыотдлительныхперегрузокитоковкороткогозамыкания, атак- |
|
Экономичная работа системы 20 электромеханизмов достигается |
же предложить технические и организационные мероприятия по более |
|
полной номинальной загрузкой каждого ЭДУ. Но даже при этом уста- |
эффективнойэксплуатациитакихэлектродвигательныхустройстввсис- |
|
новка работает не совсемэффективно, ее коэффициент мощности мень- |
теме рабочих механизмов 3-го класса. |
|
ше единицы – 0,89. И только решение установить компенсатор реактив- |
|
|
нойэнергииемкостногохарактерапозволилдостичьпредельнойэффек- |
Комментарий |
|
тивности при номинальной нагрузке и сэкономить за год на системе |
ξ |
|
Если определить ток Iχ из эквивалентной схемы замещения |
||
вцеломболее27 МВт-чэнергии. Большийэффектотустановкикомпен- |
||
2 |
||
саторов получается в случае, близком к реальному. Экономия энергии |
на рис. 10.3, то его комплекс и модуль составят соответственно: |
|
|
180 |
181 |
|
|
|
|
|
|
|
|
|
|
|
ξ |
|
|
|
|
|
|
ξ |
|
|
|
|
|
|
|
|
U1ф |
|
|
|
|
|
|||
I2c |
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
§ |
|
|
|
rc |
· |
|
|
|
|
|
|||||||
|
|
¨r |
|
|
2 |
¸ |
j x xc |
|
|
||||||||
|
|
|
|||||||||||||||
© |
1 |
|
|
|
S ¹ |
|
|
1 |
2 |
|
|
|
|||||
I2c |
|
|
|
|
|
|
|
|
|
|
U1ф |
|
|
|
|
. |
|
|
|
|
|
|
|
rc |
· |
2 |
|
|
|
||||||
§ |
|
|
|
|
|
x xc |
2 |
|
|||||||||
|
|
¨r |
|
|
2 |
¸ |
|
|
|||||||||
|
|
|
|
|
|
||||||||||||
© |
1 |
|
|
|
S ¹ |
|
1 |
2 |
|
|
|
||||||
Момент асинхронного двигателя можно определить из выражения
для активной мощности цепи ротора в сопротивлении |
r2c |
: |
||||||||||||||
S |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
М Z0 3(I2c )2 |
r2c |
; М |
3(I2c )2 r2c |
. |
|
|
||||||||||
S |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
S Z0 |
|
|
|
|
|
|||
Подставим сюда значение тока I2c , найденное выше, |
||||||||||||||||
М(S) |
|
|
|
3Uл2.ф r2c |
|
|
|
. |
|
|
||||||
|
|
ª§ |
|
|
r' |
· |
2 |
|
|
º |
|
|
||||
|
Z |
0 |
S Ǭr |
|
|
2 |
¸ |
x |
xc 2 |
» |
|
|
|
|
||
|
|
|
|
|
||||||||||||
|
|
¨ 1 |
|
|
S |
¸ |
|
1 |
2 |
» |
|
|
|
|
||
|
|
|
«© |
|
|
¹ |
|
|
|
|
|
|
|
|||
|
|
|
¬ |
|
|
|
|
|
|
|
¼ |
|
|
|
|
|
Приравнивая производную к нулю, определимэкстремальные значения М для режимов двигателя и генератора
|
dM (S) |
|
|
|
|
|
r' |
|
|
|
x1 x2c . |
||||
|
|
|
0 ; Sкр |
|
|
|
2 |
|
; xk |
||||||
|
dS |
|
r12 |
xk2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Для двигательного режима Mmax равен |
|
|
|
|
|||||||||||
|
|
|
|
1,5 U 2 |
|
|
|
|
|
|
|
' |
|
||
|
M |
|
|
|
1ф |
|
; z |
|
|
r 2 |
x2 |
|
. |
||
|
max Z0 |
(r zmax ) |
|
|
|
||||||||||
|
|
|
|
max |
1 |
k |
|
|
|||||||
Исходя из номинального значения Mн Sн можно определить r2c, |
|||||||||||||||
входящие в схему замещения |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
r2c |
Sн Rн |
|
Rн2 zmax2 |
, |
|
|
|
|||||
1,5U 2
где Rн r1 Z 1ф .
0M н
После деления M S на Mmax и некоторых преобразований найдем уточненное выражение
M S |
2Mmax 1 |
DSкр |
|
|
r |
||||
|
|
|
|
|
; |
D |
1 |
. |
|
S |
|
Sкр |
|
|
|||||
|
|
|
|
|
rc |
||||
|
|
|
|
|
2DSкр |
|
|
2 |
|
|
Sкр |
S |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
Приняв r1 o 0, получим приближенное значение для M (S) и Sкр.
Рекомендуемаялитература
1.ГОСТ 16593–79. Электроприводы. Термины и определения. – М.: Госкомитет СССР по стандартам, 1979.
2.ГОСТ 17154–71. Машины электрические вращающиеся. Термины
иопределения. – М.: Госкомитет СССР по стандартам, 1972.
3.Чиликин, М. Г. Общий курс электропривода: учебник для вузов / М. Г. Чиликин, А. С. Сандлер. – 6-е изд. – М.: Энергоиздат, 1981.
4.Копытов, Ю. В. Экономия электроэнергии в промышленности: справочник / Ю. В. Копытов, Е. А. Чуланов. – М.: Энергоатомиздат, 1982.
5.Сборник задач по общей электротехнике и основам электроники / под ред. В. Г. Герасимова. – М.: Высшая школа, 1987. – 288 с.
6.Бондаренко, А. В. Электротехника: учебное пособие / А. В. Бондаренко. –
СПб.: СПбГАСУ, 2004. – 342 с.
182 |
183 |