

Шумахер У. Полупроводниковая электроника
.pdf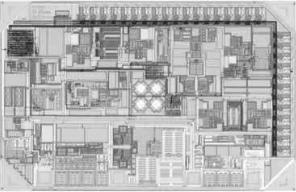
|
|
|
INFSEMI_2-Text.fm, стр. 213 из 589 (September 3, 2010, 17:04) |
|||
|
|
|
5.2. Датчики магнитного поля 213 |
|||
|
|
|
|
|||
|
Кроме того, температурный коэффициент |
было использовать в магнитных цепях с |
||||
магнитной чувствительности может быть за- |
воздушным зазором всего 1.1 мм. |
|
|
|||
дан таким образом, чтобы он, например, ком- |
5.2.3. Датчики на основе гигантского |
|||||
пенсировал тепловые эффекты постоянных |
||||||
магнитов, используемых в модуле. |
|
магниторезистивного эффекта |
||||
|
Особенностями этого модуля являются |
|
(GMR) |
|
|
|
его высокое разрешение, линейность и сла- |
Магнитные датчики прекрасно подходят |
|||||
бый дрейф выходного напряжения при из- |
||||||
для всех видов бесконтактного детектирова- |
||||||
менении температуры и в процессе нара- |
||||||
ния |
данных положения, зазоров, скоро- |
|||||
ботки. В данном случае аналоговый выход- |
||||||
стей, |
а также детектирования вращения, |
|||||
ной сигнал прямо пропорционален рабоче- |
||||||
бесконтактного измерения токов и мощнос- |
||||||
му напряжению. Это особенно важно, если |
||||||
ти. При реализации этих функций гаранти- |
||||||
выходное напряжение VOUT оцифровывает- |
||||||
руется работа датчиков даже в жёстких усло- |
||||||
ся с помощью аналого-цифрового преобра- |
виях окружающей среды, связанных с нали- |
|||||
зователя (АЦП) с рабочим напряжением |
||||||
чием грязи, абразивной крошки и высокой |
||||||
датчика Холла в качестве опорной меры. |
||||||
температурой. Это обеспечивает |
широкое |
|||||
Если рабочее напряжение изменяется на |
||||||
использование датчиков магнитного поля |
||||||
10% по сравнению с номинальным значе- |
||||||
особенно в автомобильных и промышлен- |
||||||
нием 5 В, то ASIC выдаёт выходное напря- |
||||||
ных |
применениях, а также обуславливает |
|||||
жение, которое также изменяется на 10%. |
||||||
постоянное расширение номенклатуры дат- |
||||||
В то же время цифровой код АЦП остаётся |
||||||
чиков различных типов на рынке. |
|
|
||||
неизменным, поскольку он рассчитывается |
|
|
||||
Датчики на основе гигантского магнит- |
||||||
как отношение выходного напряжения дат- |
||||||
норезистивного эффекта (GMR) устраняют |
||||||
чика и опорного напряжения. |
||||||
слабое место обычных магниторезисторов и |
||||||
|
|
|||||
|
|
датчиков Холла, связанное с их высокой |
||||
|
|
чувствительностью к флуктуациям воздуш- |
||||
|
|
ного зазора. В связи с тем, что все традици- |
||||
|
|
онные магнитные датчики реагируют на си- |
||||
|
|
лу магнитного поля, даже малейшие изме- |
||||
|
|
нения зазора между магнитом и датчиком |
||||
|
|
будут приводить к существенным измене- |
||||
|
|
ниям сигнала, чего можно избежать за счёт |
||||
|
|
существенных затрат и усложнения обра- |
||||
|
|
ботки сигнала. |
|
|
||
|
|
В отличие от них, GMR-датчики, кото- |
||||
|
|
рые компания Infineon специально разра- |
||||
|
Рис. 5.10. Фотография кристалла ИС линей- |
ботала для применений, связанных с детек- |
||||
|
тированием положения, измеряют только |
|||||
|
ного датчика Холла типа TLE 4990. |
направление внешнего поля независимо от |
||||
|
На Рис. 5.10 показана фотография крис- |
его интенсивности, благодаря чему допус- |
||||
|
каются достаточно большие зазоры и уста- |
|||||
талла микросхемы TLE 4990. В середине |
новочные допуска. В результате процедура |
|||||
кристалла можно увидеть 4 зонда Холла. |
сборки у пользователя существенно упро- |
|||||
Вдоль правого и верхнего краёв кристалла |
щается, и издержки снижаются. При соот- |
|||||
расположены 30 полостных предохрани- |
ветствующем возбуждении допустимы воз- |
|||||
тельных ячеек. Вдоль нижнего края распо- |
душные зазоры вплоть до 25 мм, что откры- |
|||||
лагаются 4 контактные площадки для под- |
вает совершенно новые применения в об- |
|||||
соединения к выводам модуля: TST, OUT, |
ласти магнитного детектирования. |
|||||
GND, VDD (слева направо), при этом вы- |
В последующих разделах сначала описы- |
|||||
вод TST используется только для тестирова- |
ваются основы эффекта GMR, конструк- |
|||||
ния. Модуль TLE 4990 поставляется в кор- |
ция и функционирование GMR-датчика. |
|||||
пусе типа P-SSO-4-1. Серия корпусов типа |
Затем следуют примеры применения, де- |
|||||
P-SSO-4-1 была разработана компанией |
монстрирующие разнообразие |
функций, |
||||
Infineon специально для датчиков магнит- |
которые просто и эффективно могут реали- |
|||||
ного поля таким образом, чтобы их можно |
зовать GMR-датчики. |
|
|
|||

 I
I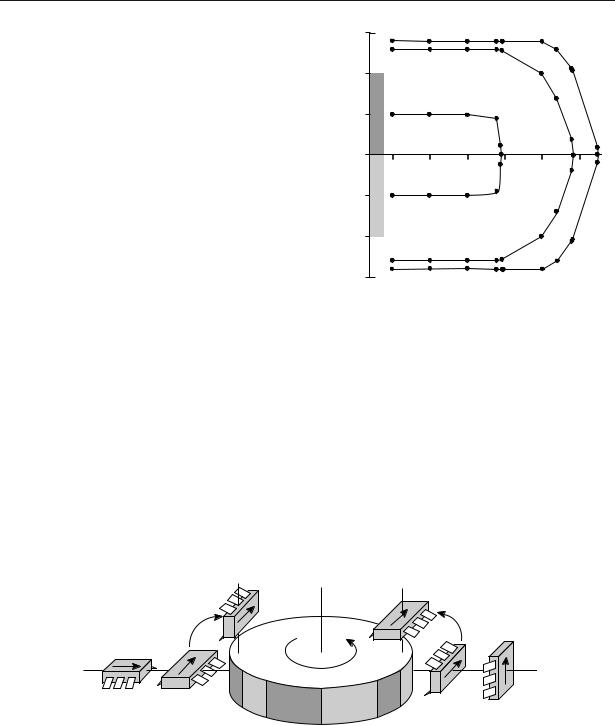
INFSEMI_2-Text.fm, стр. 218 из 589 (September 3, 2010, 17:04)
218 5. Датчики
В зависимости от требований форма сиг- |
|
|
нала может варьироваться от синусоидаль- |
N |
|
ной к треугольной и до последовательности |
||
|
||
пиков. Прямоугольная форма (Табл. 5.2, c) |
S |
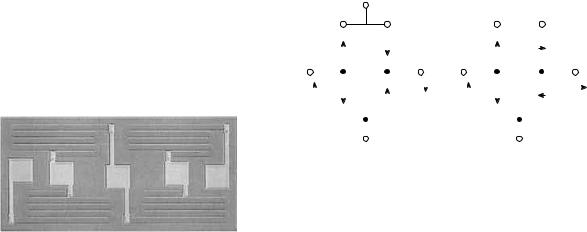
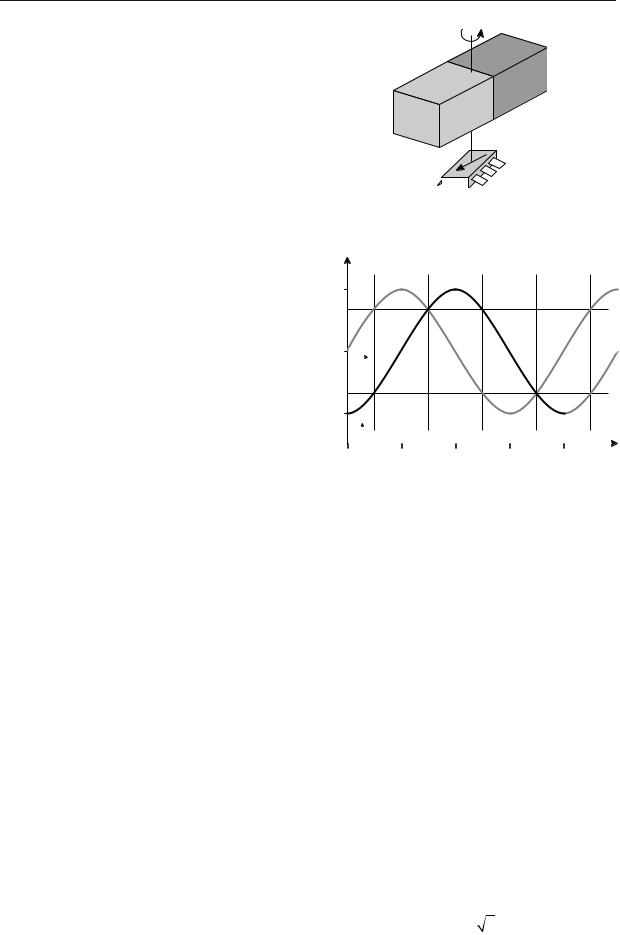
возникает тогда, когда поле вращается перпендикулярно датчику, а не в плоскости датчика, при этом детектируется только компонента, параллельная намагниченности. Вращение датчика вокруг периметра
магнитного ротора и вне плоскости датчика |
|
|
|
GMR C6 |
|
|
|
|
|
|
|
||
(bEb', cEc') задаёт форму сигнала. |
Рис. 5.21. |
Вращение первичного магнитного |
||||
В отдельных случаях магнитные роторы |
||||||
элемента над GMR-датчиком. |
||||||
с другими вариантами намагниченности |
||||||
|
|
|
|
|
||
могут обеспечивать особенно эффективную |
|
|
|
|
|
|
конфигурацию. |
|
A |
B |
C |
D |
|
Применение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Датчики на основе эффекта GMR, разра- |
Vthr |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ботанные компанией Infineon, имеют самое |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
широкое применение в области детектиро- |
0 V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
вания положения, линейного и вращатель- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ного движения. В пределах широкого диапа- |
–Vthr |
|
|
|
|
|
|
|
|
|
|
|||||||||
зона напряженности магнитного поля дат- |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
чик определяет только направление прило- |
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
женного поля, при этом возможны широкие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
зазоры и большие |
допуски регулировки. |
0° |
|
|
|
|
90° |
180° |
270° |
360° |
|
|||||||||
В зависимости от конкретного применения |
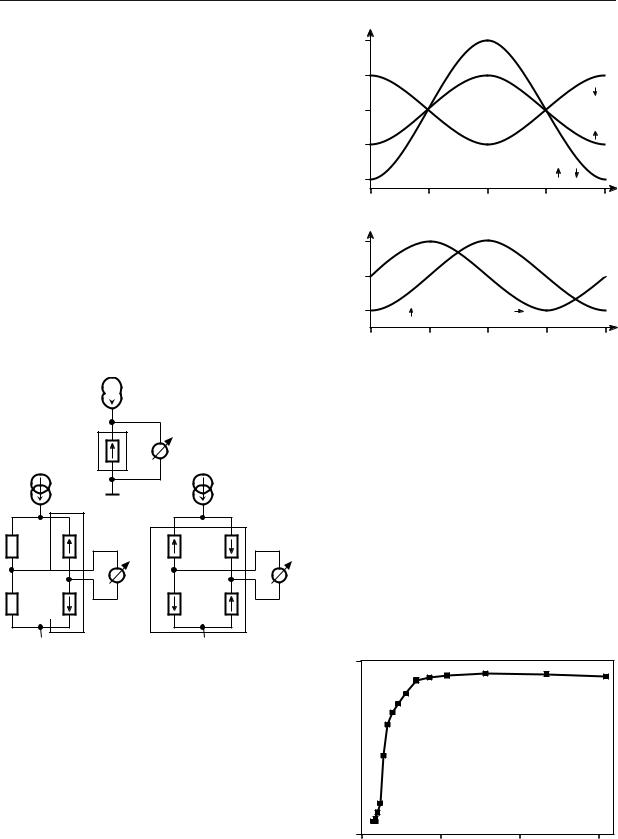
Рис. 5.22. Сигнал в 4 квадрантах от скрещён- |
|||||||||||||||||||
используются постоянные магниты стерж- |
||||||||||||||||||||
невой либо роторной формы (см. подраздел |
|
|
|
|
|
|
ных полумостов (GMR C6). |
|||||||||||||
о первичных магнитных элементах). |
В пределах квадранта сигнал с большей |
|||||||||||||||||||
Обратите внимание: для того чтобы избе- |
||||||||||||||||||||
крутизной (VC — в A и C, VE — в B и D) поз- |
||||||||||||||||||||
жать повреждения жёсткого магнитного слоя, |
||||||||||||||||||||
сильные магниты должны располагаться на |
воляет определить угол путём линейной ин- |
|||||||||||||||||||
терполяции или лучше из табличных дан- |
||||||||||||||||||||
небольшом |
расстоянии от GMR-датчиков. |
|||||||||||||||||||
ных (Табл. 5.3). |
|
|
|
|
|
|
|
|||||||||||||
Напряжённость магнитного поля в кристал- |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ле GMR не должна превышать 15 кА/м. |
Таблица 5.3. Обработка сигнала для скре- |
|||||||||||||||||||
|
|
|
|
|||||||||||||||||
Датчик абсолютного угла |
|
|
|
|
|
|
|
щённых полумостов GMR C6 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сопротивление GMR-датчика изменяет- |
Квадрант |
|
Условие |
|
|
|
|
Угол |
|
|
||||||||||
|
|
(линейная аппроксимация) |
||||||||||||||||||
ся в зависимости от внешнего магнитного |
|
|
|
|
|
|
|
|
|
|
||||||||||
A |
|
VE > Vthr |
|
90° + VC·(45°/Vthr) |
||||||||||||||||
поля, что обеспечивает абсолютное измере- |
|
|
||||||||||||||||||
ние угла. Угловой диапазон детектирования |
B |
|
VC > Vthr |
|
180° – VE·(45°/Vthr) |
|||||||||||||||
и разрешение зависят от первичного маг- |
C |
|
VE > Vthr |
|
270° – VC·(45°/Vthr) |
|||||||||||||||
нитного элемента (число пар полюсов), от |
D |
|
VC > Vthr |
|
360° + VE·(45°/Vthr) |
|||||||||||||||
типа GMR-датчика (скрещённая полумос- |
При |
напряжении |
источника |
питания |
||||||||||||||||
товая или мостовая конфигурация), а также |
||||||||||||||||||||
VIN = 5 В и эффективности GMR R/R0 > |
||||||||||||||||||||
от специфики обработки сигнала. Датчик |
||||||||||||||||||||
типа GMR C6 со скрещёнными полумоста- |
4% флуктуация уровня неусиленного сигна- |
|||||||||||||||||||
ла достигает по крайней мере 200 мВ. Точка |
||||||||||||||||||||
ми однозначно детектирует вращение про- |
||||||||||||||||||||
пересечения |
двух |
измерительных кривых |
||||||||||||||||||
стого стержневого магнита в пределах 360° |
||||||||||||||||||||
определяет пороговое значение |
|
|
||||||||||||||||||
(Рис. 5.21). |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Сигналы |
двух |
полумостов (Рис. 5.17) |
|
|
|
|
|
|
|
|
|
|
|
200 мВ |
|
|
|
|||
смещены по фазе на 90° и могут быть де- |
|
|
|
|
|
|
|
|
Vthr |
= |
. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
шифрованы из простого сравнения 4 квад- |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||
рантов (Рис. 5.22).
INFSEMI_2-Text.fm, стр. 219 из 589 (September 3, 2010, 17:04)
5.3. Датчики давления 219
Угловое разрешение в 2° соответствует |
логии полный набор элементов датчика |
||||||||
180 точкам в пределах всей окружности или |
формируется в поверхностной области плас- |
||||||||
45 точкам на квадрант, для чего требуется |
тин кремния, что позволяет проводить тех- |
||||||||
разрешение электрического сигнала |
нологический |
маршрут с использованием |
|||||||
|
200 мВ |
|
стандартной |
технологической |
БиКМОП- |
||||
|
|
линейки. Благодаря этому можно формиро- |
|||||||
|
|
= 3 мВ . |
|
вать в одном кристалле не только ячейки |
|||||
|
45 2 |
|
|||||||
|
|
|
|
датчика, но и схемы обработки сигнала и |
|||||
Разрешение в 1.5% ограничивается тем- |
оцифровки. С точки зрения применения |
||||||||
пературным коэффициентом |
эффекта |
это приводит к сокращению числа требуе- |
|||||||
GMR, который составляет около 0.1%/К. |
мых компонентов, что положительно отра- |
||||||||
При температурных флуктуациях более 7°С |
жается на сложности схем и их надёжности. |
||||||||
для достижения требуемого разрешения не- |
Датчик давления типа KP 100 (Рис. 5.23) |
||||||||
обходимо использование схем компенсации. |
был первым видом такой продукции, се- |
||||||||
Варианты |
|
рийно освоенной в 1998 году. Этот датчик |
|||||||
|
давления используется в спутниковых сис- |
||||||||
|
|
|
|
||||||
Использование магнитного ротора с N |
темах, в боковых подушках безопасности, а |
||||||||
парами полюсов увеличивает разрешение в |
также в дверях автомобилей. Благодаря то- |
||||||||
N раз и ограничивает угловой диапазон до |
му, что выходной сигнал является цифро- |
||||||||
360°/N. |
|
вым, микропроцессор может обмениваться |
|||||||
Мостовой датчик типа GMR B6 может |
данными |
непосредственно |
с |
датчиком. |
|||||
однозначно распознавать сигналы только в |
В случае аварии датчик детектирует волну |
||||||||
диапазоне 180°, но выдаёт сигнал вдвое |
давления на двери и запускает рутинную |
||||||||
большей амплитуды. |
|
процедуру. При использовании определён- |
|||||||
Типичные применения |
|
ного алгоритма анализа микропроцессор |
|||||||
|
гарантирует предотвращение некорректно- |
||||||||
К типичным применениям относятся пе- |
го срабатывания подушек |
безопасности, |
|||||||
например, в случае слишком резкого за- |
|||||||||
даль газа, рулевое управление, |
регулятор |
||||||||
крывания двери или удара по ней. Решение |
|||||||||
положения сидения, потенциометр. |
|||||||||
о надуве подушек безопасности может быть |
|||||||||
|
|
|
|
||||||
5.3. Датчики давления |
|
принято значительно быстрее по сигналу |
|||||||
|
давления, чем по сигналу ускорения. Это |
||||||||
|
|
|
|
||||||
5.3.1. Микромеханика поверхности, |
является |
критическим преимуществом с |
|||||||
датчики давления с цифровым |
точки зрения ограниченных боковых зон |
||||||||
выходом (KP 100) |
|
сжатия при боковом ударе. |
|
|
|||||
С учётом возрастающей потребности в |
|
|
|
|
|
||||
интеллектуальной электронике, увеличива- |
|
|
|
|
|
||||
ется необходимость применения всё более |
|
|
|
|
|
||||
сложных датчиков не только в промышлен- |
|
|
|
|
|
||||
ности, но и в домашнем хозяйстве и автомо- |
|
|
|
|
|
||||
бильной электронике. В этих областях крем- |
|
|
|
|
|
||||
ниевые датчики давления стали доминиро- |
|
|
|
|
|
||||
вать в устройствах измерения давления бла- |
|
|
|
|
|
||||
годаря своим малым размерам и замечатель- |
|
|
|
|
|
||||
ным свойствам кремния как материала. |
|
|
|
|
|
||||
Современные датчики имеют значительный |
Рис. 5.23. Внешний вид датчика давления типа |
||||||||
потенциал развития с возможностью интег- |
KP 100 в SMD-корпусе P-DSOF-8. |
||||||||
рации в одном кристалле собственно эле- |
|
|
|
|
|
||||
ментов датчика и электронных схем обра- |
Работа датчика KP 100 основана на ём- |
||||||||
ботки сигналов (компенсация температуры, |
костном принципе, когда изменение давле- |
||||||||
аналого-цифровое преобразование и т.д.). |
ния окружающей среды приводит к измене- |
||||||||
Решающим шагом в этом направлении |
нию ёмкости кристалла. Для такого преоб- |
||||||||
явилось овладение технологией микромеха- |
разования физической величины, над гер- |
||||||||
ники поверхности. В рамках данной техно- |
метично закрытой полостью формируется |
||||||||
INFSEMI_2-Text.fm, стр. 220 из 589 (September 3, 2010, 17:05) |
|
|
|
|
|
|
|
|||||
220 5. Датчики |
|
|
|
|
|
|
|
|
|
|
||
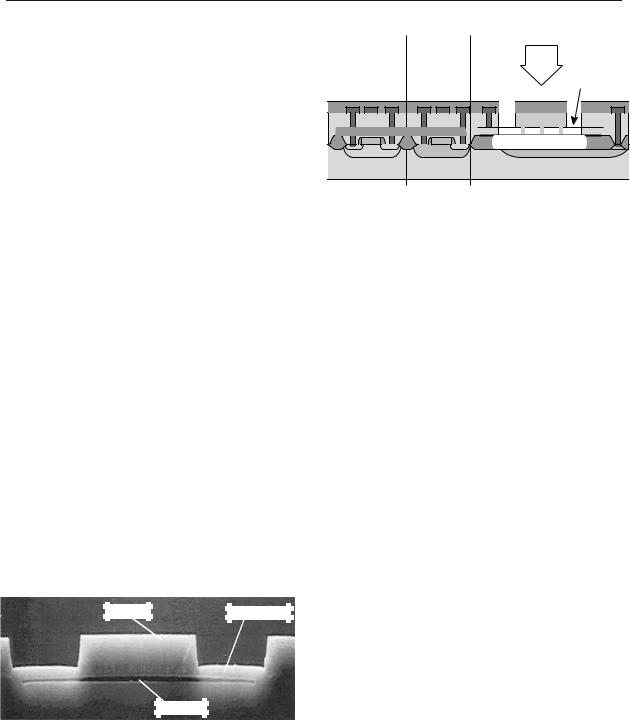
чувствительная к давлению мембрана. Эта |
|
|
|
Давление |
Поликре- |
|||||||
мембрана образует верхнюю обкладку кон- |
|
|
|
|||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
мниевая |
|||||||
денсатора, в то время как нижний электрод |
|
|
|
|
|
|||||||
|
|
|
|
|
мембрана |
|||||||
формируется на подложке. |
|
|
|
n-МОП |
p-МОП |
|
|
толщиной |
||||
Изготовление |
такой |
мембраны |
(см. |
|
|
400 мкм |
||||||
|
|
|
|
|
|
|||||||
Рис. 5.24) размерами 70 70 мкм и толщи- |
|
|
|
|
|
|
||||||
ной около 400 мкм является фундаменталь- |
|
|
|
|
|
|
||||||
ной особенностью этого датчика, посколь- |
|
|
|
|
|
|
||||||
ку, в отличие от традиционных кремниевых |
|
|
|
|
|
|
||||||
датчиков давления, в данном случае исполь- |
|
|
|
|
|
|
||||||
зуется стандартная 6-дюймовая БиКМОП |
Рис. 5.25. Схематическое представление струк- |
|||||||||||
технологическая линейка. Для реализации |
||||||||||||
туры ячейки датчика, соответствующей приве- |
||||||||||||
поставленной цели полевой окисел форми- |
||||||||||||
дённому на Рис. 5.24 поперечному сечению. |
||||||||||||
руется над нижним электродом конденсато- |
||||||||||||
|
|
|
|
|
|
|||||||
ра (подложка), который на следующем эта- |
сигналов, чувствительных к давлению, и |
|||||||||||
пе покрывается слоем легированного поли- |
||||||||||||
сигналов опорных панелей. |
|
|
||||||||||
кремния, после чего он сначала перфориру- |
|
|
||||||||||
Полученный сигнал претерпевает анало- |
||||||||||||
ется с |
использованием сухого |
травления. |
||||||||||
го-цифровое преобразование в самом чипе |
||||||||||||
Через эти поры лежащий ниже оксид (жерт- |
||||||||||||
благодаря интеграции АЦП. Это гарантиру- |
||||||||||||
венный слой) вытравливается с использова- |
||||||||||||
ет как |
очень хорошее |
отношение сиг- |
||||||||||
нием травления в плавиковой кислоте. Это |
||||||||||||
нал/шум, так и высокую точность. На мо- |
||||||||||||
приводит к формированию свободно вися- |
||||||||||||
дуль поступает внешний тактовый сигнал с |
||||||||||||
щей кремниевой мембраны. Окисный ку- |
||||||||||||
возможностью выбора |
тактовой |
частоты |
||||||||||
пол в центре мембраны усиливает жёсткость |
||||||||||||
4 МГц или 8 МГц. С помощью сигма-де- |
||||||||||||
мембраны. Благодаря этому лежащая ниже |
||||||||||||
льта-модулятора |
аналоговый |
ёмкостной |
||||||||||
полость |
герметизируется |
при |
требуемом |
|||||||||
сигнал сначала преобразуется в поток циф- |
||||||||||||
давлении (Рис. 5.25). Чувствительность дат- |
||||||||||||
ровых данных. Фильтр децимации придаёт |
||||||||||||
чика в значительной степени определяется |
||||||||||||
потоку вид последовательности 16-битных |
||||||||||||
геометрическими параметрами (площадью |
||||||||||||
слов. Высокочастотный шум устраняется из |
||||||||||||
и толщиной структуры). Поскольку все тех- |
||||||||||||
сигнала |
давления |
с помощью |
фильтра с |
|||||||||
нологические операции хорошо контроли- |
||||||||||||
верхней граничной частотой 360 Гц. Затем |
||||||||||||
руются, датчики могут быть изготовлены с |
||||||||||||
данные записываются в последовательный |
||||||||||||
высокой воспроизводимостью. |
|
|
||||||||||
|
|
сдвиговый регистр (SPI — последователь- |
||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
ный периферийный интерфейс) со скоро- |
||||||
|
Окисел |
|
Мембрана |
стью 7.8 кГц, откуда в конце концов он мо- |
||||||||
|
|
жет быть считан с помощью микропроцес- |
||||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
сора со скоростью 500 кГц. Последующий |
||||||
|
|
|
|
|
|
сдвиговый регистр может быть использован |
||||||
|
|
|
|
|
|
микропроцессором для определения режи- |
||||||
|
|
|
|
|
|
ма функционирования (штатный или диа- |
||||||
|
|
Полость |
|
|
гностический). |
|
|
|
|
|||
Рис. 5.24. Изображение поперечного сечения |
Датчик рассчитан на диапазон давлений |
|||||||||||
60…130 кПа, значения определяются с точ- |
||||||||||||
ячейки датчика в сканирующем электронном |
ностью в 12 бит. |
|
|
|
|
|||||||
|
микроскопе. |
|
|
Датчик работает в диапазоне температур |
||||||||
При возникновении импульса давления |
–40…+90°С при номинальном рабочем на- |
|||||||||||
пряжении 5 В и максимальном токе от ис- |
||||||||||||
мембрана смещается, что приводит к изме- |
точника питания 2.5 мА. |
|
|
|
||||||||
нению ёмкости. Для увеличения уровня |
Для того чтобы соответствовать жёстким |
|||||||||||
сигнала формируется матрица из 4 панелей, |
требованиям автомобильной электроники, |
|||||||||||
в каждой из которой 14 мембран соединены |
в датчике используются три различных диа- |
|||||||||||
параллельно; две из этих панелей предна- |
гностических режима. Это позволяет осу- |
|||||||||||
значаются для детектирования давления, а |
ществлять различные варианты автотести- |
|||||||||||
две других используются как опорные. Вы- |
рования датчика и непрерывно проверять |
|||||||||||
ходной сигнал формируется как разность |
его работоспособность. |
Диагностические |
||||||||||

 T
T  T
T