

все лекции методы и средства иик
.pdfБ) у |
|
|
х |
В)у |
|
х |
|
Если пару значений |
нанести на (х; у) диаграмму и искать прямую, |
которая изображает возможную линейную зависимость, то можно использовать метод наименьших квадратов. Правда теперь имеет смысл b1 и b2 (две прямые) так как каждая переменная в равной мере может быть рассмотрена, как зависимая и как независимая.
Если рассматривать функцию ,, то коэффициент b1 выбирают так, чтобы сумма всех квадратов была бы минимальной, однако с теми же основаниями у может рассматриваться как свободная переменная,
тогда коэффициент b2 функции |
выбирают так, чтобы |
минимальной была сумма всех квадратов |
. |
В общем случае (а), прямые не совпадают, можно показать, что b1 и b2, тем сильнее стремятся к нулю, чем более независимы х и у. При полной статистической независимости, прямые перпендикулярны b1=b2=0 (б).
Если имеет место функциональная зависимость, то b1=1/b2 и обе прямые регрессии совпадают.
Коэффициенты регрессии, в зависимости от тесноты статистической связи изменяются между нулем и значением крутизны, соответствующей функциональной зависимости. Поэтому значения b1 и b2 в какой-то мере отражают тесноту линейной связи, но полностью охарактеризовать ее не могут, так как не зафиксирована верхняя граница b. Этого можно достичь, по средствам нормирования, следующим образом:
 , где r – коэффициент корреляции.
, где r – коэффициент корреляции.
41
r может принимать значения от минус 1 до плюс 1. При строгой функциональной связи лежат на прямой. При положительном коэффициенте угла наклона прямой r=+1, при отрицательном r=-1.
Если х и у полностью статистически независимы, то r=0. Модуль коэффициента r, является мерой линейной зависимости, чем ближе пара значений расположения к прямой, тем больше |r|→1.
Замечания:
1.Из рассмотренного вытекает: если две величины независимы друг от друга, то они не коррелированны и равны нулю. Если пары значений
лежат на прямой, то r=1. Обратные утверждения в общем случае не верны.
Если r=0, то это означает что имеется отсутствие линейной зависимости, то х и у вообще не зависят друг от друга.
Если r=1, то из этого не следует, что зависимость х и у линейна, а следовательно только то, что эти величины зависят друг от друга.
2.r используется как мера линейной зависимости, то необходимо учитывать, что r зависит от объема выборки n. Очевидно, что при наличии только двух пар значений, величина r всегда равна 1. Однако, как можно видеть при определении доверительных границ при малых n, доверительный интервал увеличивается при использовании r в качестве статистической характеристики, только при двух пар значений недопустимо.
3.Если пары значений лежат вблизи прямой, то из этого что r принимает значения близкие к ±1, не следует что эта линейная зависимость отображает также причинно-следственную связь.
Весьма вероятно, что имеется корреляция между числом краж и числом автомобилей в стране, возможно, что такая мнимая, лишенная смысла корреляция происходит от того, что коррелирующие явления имеют общую причину, но так бывает далеко не всегда. Гипотеза, о наличии причинно-следственной связи должна быть обусловлена в каждом отдельном смысле. Корреляция показывает лишь, не противоречат ли полученные результаты гипотезе.
Коэффициент корреляции r рассчитан по исходному уравнению характеризует корреляцию выборки может быть использован в
качестве оценки математического ожидания коэффициента корреляции генеральной совокупности. При этом возникает задача
42

статистической достоверности этого коэффициента. При этом проверяют, является ли отличным r от нуля, статистически значимым.
Измерение как процесс передачи сигналов
Характерной чертой любого измерения является передача сигнала.
Сигнал – это физическая величина, несущая информацию. В процессе преобразования в измерительном устройстве параметры и вид сигнала часто изменяются, однако передаваемая им измеряемая величина должна претерпевать минимальные искажения.
Взаимосвязь двух и более сигналов устанавливается с помощью так называемых передаточных звеньев – речь идет не о приборных узлах, а о направленной функциональной связи между входным сигналом (причиной) и выходным сигналом (следствием). Эта связь характеризуется передаточными свойствами звеньев. Передаточные звенья и взаимодействующие сигналы изображаются с помощью блок-схем.
|
|
x1 |
x2 |
|||||
xe |
|
|
|
|
|
|
xa |
|
UV1 |
|
|
UV2 |
UV3 |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рисунке передаточная характеристика между xe и xa характеризуется свойствами трех звеньев UV1, UV2, UV3
Измерительные сигналы и их математическое описание
Процесс измерения, понимаемый как процесс передачи сигналов, характеризуется самими сигналами и передаточными свойствами звеньев. Измерение возможно, если свойства звеньев соответствуют свойствам измерительного сигнала, поэтому типовые характеристики этих двух компонентов должны иметь общее математическое описание. Рассмотрим математическое описание характеристик сигналов.
Классификация сигналов:
1.Детерминированный
43
2.Стохастический
3.Периодический
4.Апериодический
5.Стационарный
6.Нестационарный
44

Детерминированный сигнал (причинно-определенный) – в любое время определен однозначно, является воспроизводимым. Величину можно предсказать в любой момент времени, пользуясь математическим описанием.
Стохастический (случайный) – в каждый момент времени изменяется случайным образом и может быть описан только статистическими законами. Математическое описание не дает возможности предсказать конкретное значение.
Периодический – характеризуется равенством
Апериодический – не периодический сигнал. В отдельных случаях это выражение используется для сигналов, не содержащих колебательной составляющей.
Стационарный сигнал – стохастический сигнал, статистические характеристики которого не изменяются во времени.
Есть различие между установившимся и стационарным сигналом. Установившийся – не изменяющийся во времени ( )
Нестационарный – случайный сигнал с неустановившимися характеристиками.
45
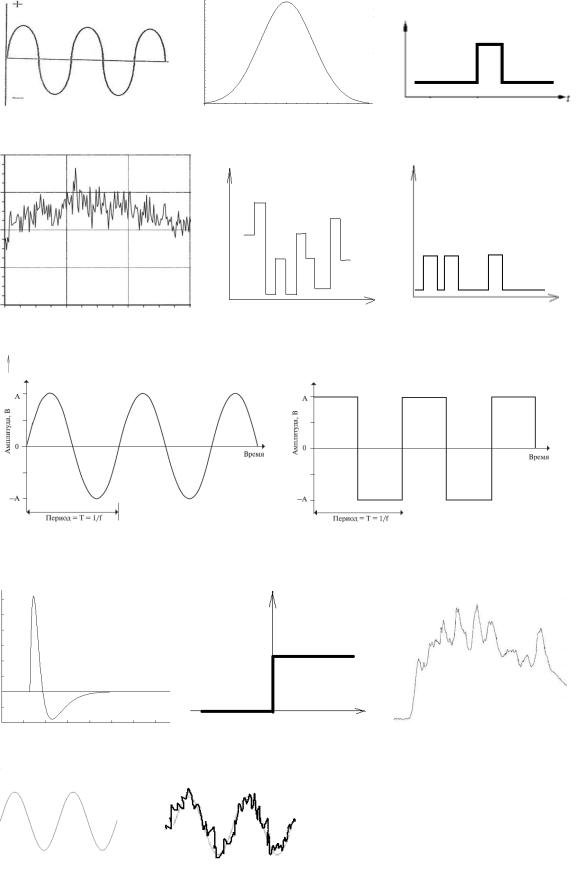
Временные характеристики детерминированных измерительных сигналов
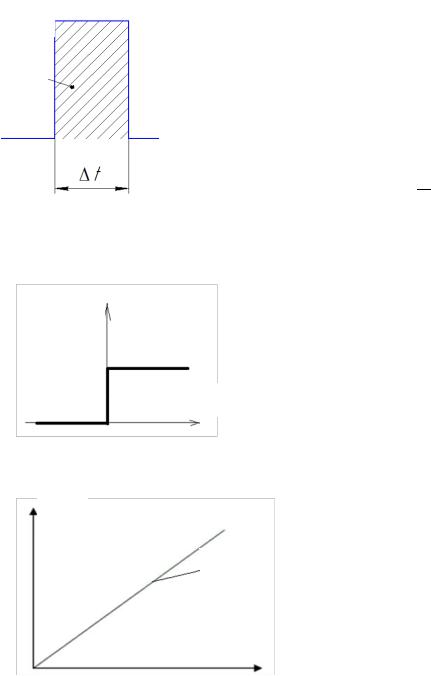
А) Единичный импульс
1/
F=1
Б) Единичная функция
1
t
В) Линейно-нарастающая
t
Единичная функцияесть интеграл от единичной импульсной функции. Линейно-нарастающая функция получается в результате интегрирования единичной функции.
Особое место при описании сигналов занимают гармонические колебания
46
В то же время описание гармонической функции возможно в комплексной форме:
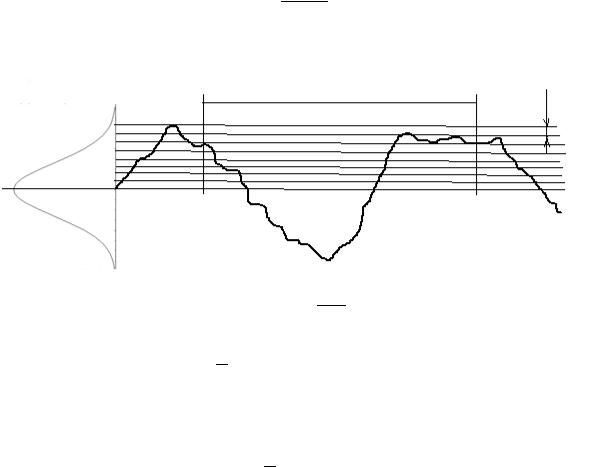
Временные характеристики стохастических сигналов
Описание стохастических сигналов как функции времени в детерминированном виде невозможно. Дается статистическое описание, при этом предполагается, что сигнал является стационарным.
Если амплитуду сигнала разбить на интервалы шириной , то можно определить относительную частоту для каждого интервала:
Амплитудная плотность:
T
x
t
Если |
, то |
Дисперсия сигнала – СКО амплитуды от среднего значения
Нужно помнить, что характеристика сигнала только с помощью амплитудной плотности связана с известной потерей информации. Одному и тому же распределению плотности амплитуд может соответствовать бесконечное множество форм сигнала, то есть плотность амплитуд не характеризует тенденцию к изменению сигнала во времени.
47

Корреляционная функция
Для изучения вопроса о тенденции сигнала к сохранению может использоваться корреляция.
Для определения наличия линейной статистической связи между парами значений рассчитывают коэффициент корреляции. Чем теснее линейная зависимость, тем больше модуль коэффициента корреляции,
тем с большей вероятностью на основе значения функции |
можно |
|
прогнозировать значение функции |
в любой момент времени |
|
Рассматриваемый отрезок времени |
это независимая переменная, таким |
|
образом, коэффициент корреляции является переменной |
. В данном случае |
|
имеет место так называемая автокорреляционная функция.
В отличие от коэффициента корреляции дискретных пар значений, автокорреляционная функция в общем случае относится к непрерывному сигналу и часто не нормируется.
Как и при расчете среднего значения и дисперсии сумма дискретных значений заменяется интегралом
Можно ожидать, что в общем случае для больших сдвигов времени тенденция к сохранению сигнала становится меньше. это максимум функции и справедливо неравенство:
Автокорреляционная функция является четной относительно .
48
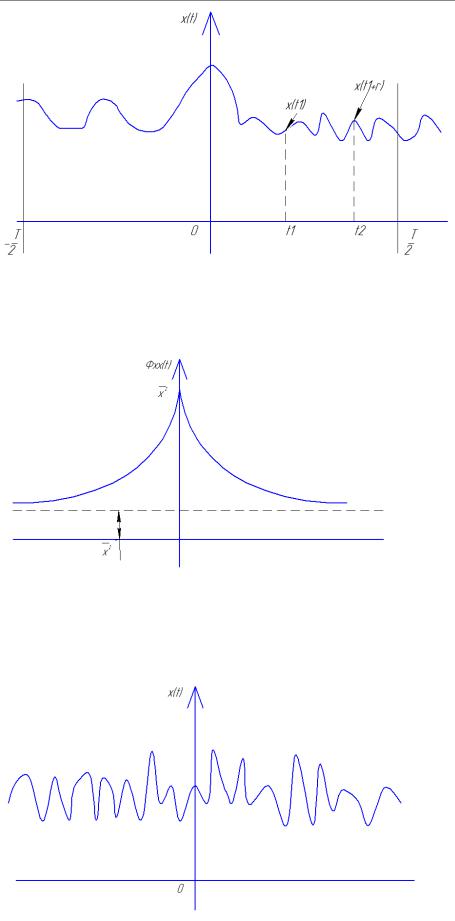
а)стохастический сигнал
б) автокорреляционная функция Виды сигналов:
49
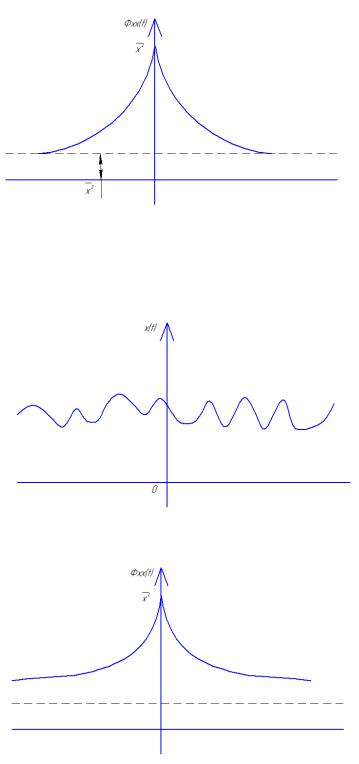
а) малый сигнал с малой тенденцией к изменению, зависимость от крутая и быстро выходит к .
б) сигнал с большой тенденцией к изменению. Низкочастотная функция.
50