

Автоматическая регулировка усиления (ару).
АРУ предназначена для поддерживания уровня выходного сигнала приемного устройства или усилителя вблизи некоторого номинального значения при изменении уровня входного сигнала. Использование АРУ необходимо потому, что уровень входного сигнала может меняться достаточно быстро и хаотически, на что невозможно отреагировать с помощью ручной регулировки.
Причин изменения уровня входного сигнала достаточно много:
-
Изменение расстояния между источником излучения и приемником;
-
Изменение условий распространения радиоволн;
-
Перестройка приемника с одной станции на другую;
-
Изменение взаимонаправленности приемной и передающей антенн; и т.д.
В радиолокационных приемниках к перечисленным причинам можно добавить флюктуации эффективной отражающей поверхности цели, смена целей с различными эффективными поверхностями, случайные изменения поляризации принимаемых волн.
В связных приемниках напряжение входного сигнала может меняться примерно на 60дб |103|, а в радиолокации на 80дб |105| . Выходное же напряжение не должно изменяться более чем в1.2÷3 раза |1.6÷9.6|дб, что определяется как допустимыми искажениями информации, так и отсутствием перегрузок каскадов приемника, которые приводят к длительной потери чувствительности. В то же время сама система АРУ не должна вызывать чрезмерных искажений огибающей сигнала и вызывать паразитную модуляцию сигнала.
В идеале выходное напряжение приемника должно оставаться постоянным после достижения некоторого значения выходного напряжения, обеспечивающего нормальную работу оконечного устройства. При этом коэффициент усиления должен изменяться по закону
K=Uвых мин/Uвх при Uвх ≥ Uвх мин
Схемы АРУ строятся по двум принципам с регулировкой «назад» и с регулировкой «вперед». Иначе их еще называют обратными и прямыми. Обратные системы АРУ (системы с обратной связью) в них точка съема напряжения, формирующего регулирующее воздействие, расположена дальше от входа приемника, чем точка приложения регулирующего воздействия.
В прямых системах АРУ точка съема напряжения запуска АРУ расположена ближе ко входу приемника, чем точка приложения регулирующего напряжения.
Обратные системы АРУ не могут обеспечить полного постоянства Uвых, так как оно является входным для системы АРУ и должно содержать информацию для соответствующего изменения регулирующего воздействия. Кроме того, эта система не может обеспечить одновременно большую глубину регулировки при Uвых≈const и высокое быстродействие по соображениям устойчивости. В тоже время эта система защищает от перегрузки все каскады, расположенные от входа дальше, чем точка приложения регулирующего воздействия.
Прямые системы АРУ принципиально могут обеспечить идеальное регулирование, когда Uвых≈const при Uвх ≥ Uвх мин и сколь угодно высокое быстродействие. Реально же это не выполнимо, так как степень постоянства выходного напряжения обусловлена конкретными данными элементов цепи АРУ и цепей приемника, подверженных технологическим разбросам параметров, временным и режимным изменениям. При использовании данной системы АРУ от перегрузок защищаются каскады расположенные дальше точки приложения регулирующего воздействия.
Сама система АРУ находится под воздействием сигнала с широким динамическим диапазоном, подвержена перегрузке и должна содержать свои обратные связи. Т акая система сама превращается в отдельный канал приемника с достаточно сложной схемой.
На практике большее применение находят обратные системы АРУ, при этом возможно использовать комбинированные системы АРУ.
Структурная схема обратной АРУ может быть представлена в следующем виде
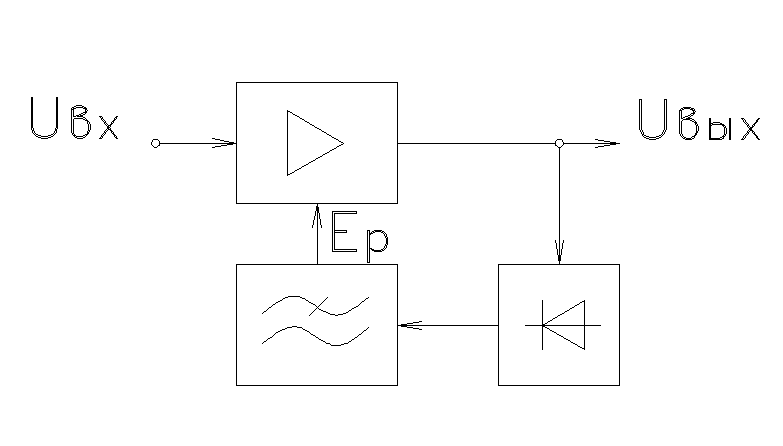
Напряжение регулировки подается на усилитель со стороны выхода. Детектор АРУ обеспечивает пропорциональность Eρ выходному напряжению, т.е. Eρ=KдUвых . Фильтр АРУ отфильтровывает составляющие частот модуляции. Такую схему называют простой АРУ. До или после детектора в цепях АРУ может включаться усилитель и тогда АРУ считается усиленной.
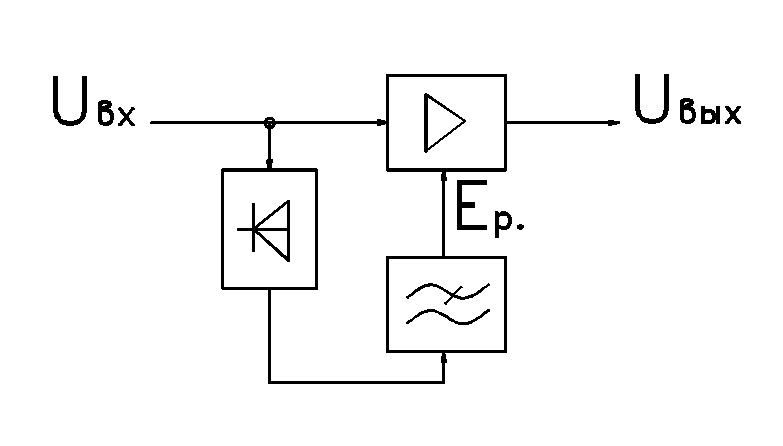
Структурная схема прямой простой АРУ включает те же элементы.
Функциональная схема комбинированной АРУ включает следующие элементы.
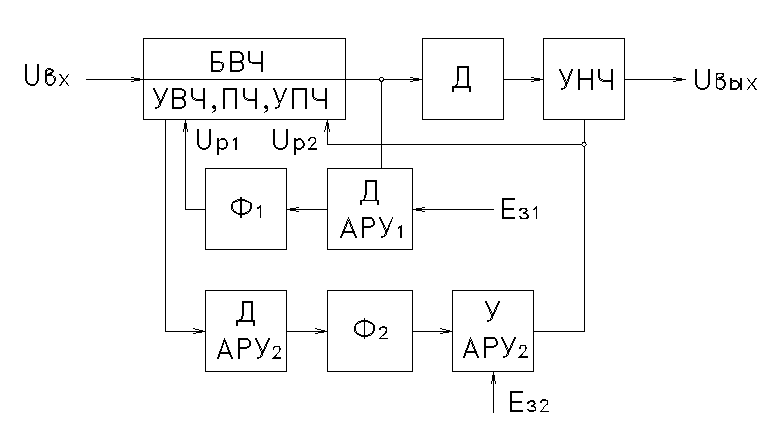
Обратная система АРУ образована детектором ДАРУ1, фильтром Ф1 и всеми каскадами основного тракта, расположенными между точкой ввода регулирующего напряжения Uρ1 и выходом блока высокой частоты (БВЧ).
В прямую схему АРУ входят детектор ДАРУ2, фильтр Ф2 и усилитель постоянного напряжения У АРУ2. Регулирующее напряжение Uρ2 вводится в БВЧ и УНЧ, который может и отсутствовать. Фильтры Ф1 и Ф2 придают цепям АРУ необходимую инерционность, обусловленную как устойчивость АРУ1, так и отсутствием демодуляции амплитудно модулированных сигналов в АРУ1 и АРУ2.
Роль фильтров могут играть цепи нагрузки детекторов. Регулирующие напряжения Uρ1 и Uρ2, не содержащие составляющих с частотой полезного сигнала, содержат составляющие изменяющиеся с частотами паразитной амплитудной модуляции входного сигнала. Полезная информация беспрепятственно проходит через основной тракт приемника, выделяется детектором и усиливается УНЧ, образуя выходное напряжение.
Нет необходимости снижать усиление слабых сигналов (Uвх < Uвх мин), не обеспечивающих номинального выходного напряжения при максимальном усилении всех каскадов. Для придания цепям АРУ пороговых свойств они запираются принудительным смещением и отпираются тогда, когда напряжение входного сигнала превысит напряжение запирания. Как правило напряжения запирания (задержки) подаются на детекторы или усилители (На схеме E31 и E32).
Задержка может вводиться по среднему значению сигнала или по максимальному. В цепи АРУ1 нет специального усилителя и она является не усиленной системой. АРУ2 система усиленная, она обладает большей глубиной регулирования и способна обеспечивать меньший динамический диапазон выходного сигнала.
При слабом сигнале на входе приемника и максимальном коэффициенте усиления на его выходе прослушиваются шумы, создаваемые внешними помехами и собственными шумами приемника. Для устранения этого дефекта используются бесшумные системы АРУ.
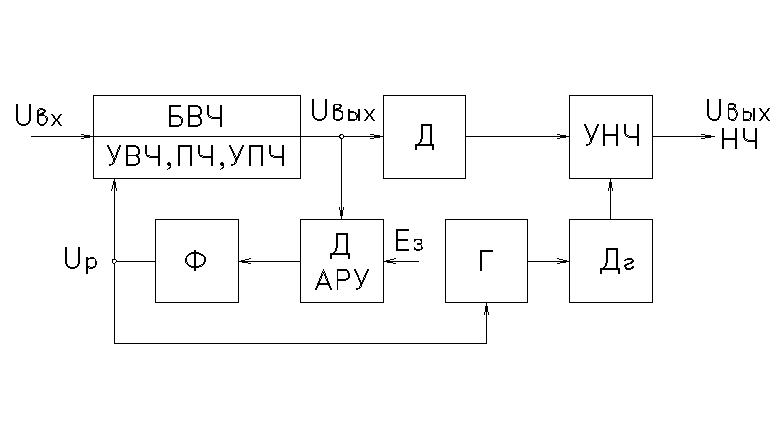
Автогенератор генерирует колебания высокой частоты, находящейся вне пределов полосы пропускания УНЧ. Колебания детектируются, а выпрямленное напряжение запирает один из каскадов УНЧ.
При условии когда входное напряжение БВЧ больше напряжения запирания Uвых> E3 замыкается система АРУ и начинает поступать регулирующее напряжение Uρ, которое кроме блока высокой частоты подается на генератор срывая его колебания. В результате открывается запертый каскад УНЧ.
В обзорных РЛС уровень внешних шумов может сильно изменяться с изменением направления антенны. Для выравнивания уровня выходных шумов приемника используется «АРУ по шумам» (ШАРУ). Регулирующее напряжение в этом случае вырабатывается в результате детектирования шумов. Быстродействие системы должно быть согласованно с периодом обзора, чтобы ШАРУ успевала отрабатывать изменения уровня шумового фона. Кроме того для уменьшения маскировки на экране локатора отметок от целей интенсивными отражениями от земной поверхности и местных предметов и нормализации отметок от целей с одинаковой эффективной отражающей поверхностью, расположенных на различных расстояниях от РЛС применяют временную регулировку усиления ВАРУ.
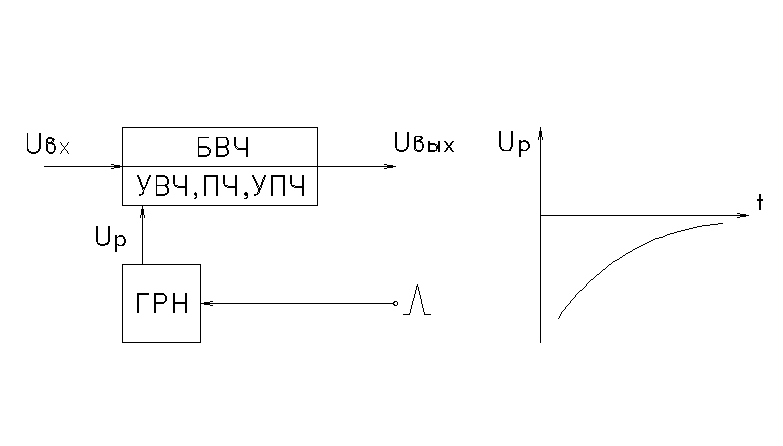
Пусковой импульс от модулятора РЛС, формируемый одновременно с зондирующим, запускает генератор регулирующего напряжения. В начальный период напряжение Uρ может даже запирать приемник, а затем по мере уменьшения его усиление растет, доходя до максимума. Таким образом усиление связывается с дальностью. Форма и скорость изменения Uρ устанавливается в зависимости от конкретных условий. Такая система регулировки усиления является автономной, не связанной с интенсивностью входного сигнала в каждый момент времени.
По степени быстродействия различают АРУ инерционные и быстродействующие (БАРУ). Степень быстродействия определяется относительно скорости изменения интенсивности сигнала. При высоком быстродействии системы не удается получить большую глубину регулирования без ухудшения устойчивости. Для устранения этого недостатка применяют несколько последовательных петель БАРУ, при этом одна петля охватывает один усилительный каскад.
В настоящее время для управления РЛС и обработки радиолокационной информации широкое применение находит цифровая обработка, в том числе и создание цифровых АРУ (ЦАРУ). ЦАРУ имеет ряд преимуществ перед аналоговыми. Это в первую очередь:
-
Независимость длительности процесса установления требуемого усиления от уровня входного сигнала;
-
Независимость регулировочных характеристик от разброса параметров и конкретных форм АРУ и свойств регулируемого каскада;
-
Возможность установления требуемого усиления после приема первого импульса от сопровождаемой цели;
-
Сохранение установленного усиления при перерывах в приеме сигнала.
Один из вариантов импульсной АРУ можно представить следующей функциональной схемой.
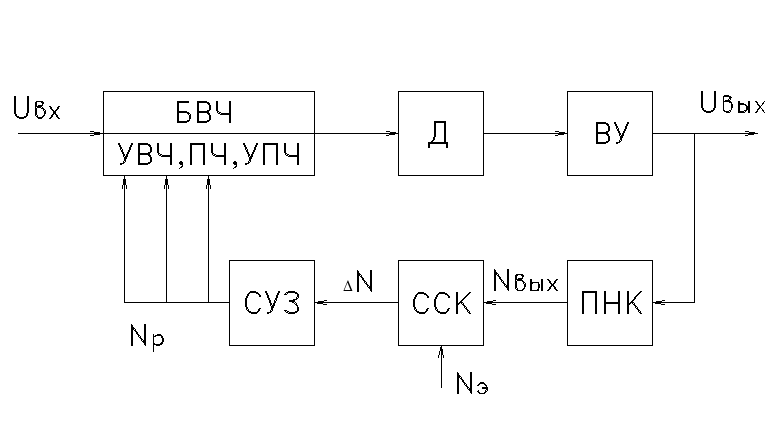
Выходное напряжение видеоусилителя преобразуется в двоичный код с помощью преобразователя напряжение – код. Код выходного напряжения Nвых сравнивается с эталонным кодом Nэ в схеме сравнения кодов, образуя код рассогласования ∆N. ССК выполняет роль порогового устройства, а эталонный код аналог напряжения задержки. В результате поразрядного усреднения в схеме усреднения и запоминания (СУЗ) формируется код регулирования, который управляет регулируемыми элементами с дискретной двоичной регулировкой. В представленной схеме регулируемыми элементами являются каскады УПЧ с дискретной регулировкой.
Вариантом аналоговой схемы АРУ импульсных приемников является следующая.
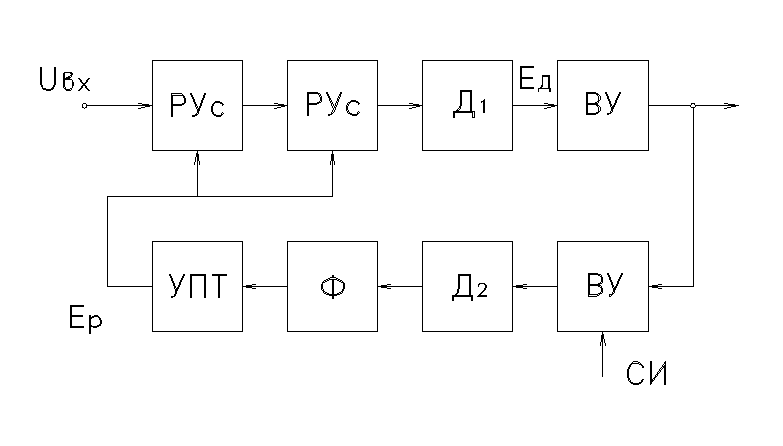
В данной схеме импульсный сигнал детектируется дважды, вначале детектором радиоимпульсов Д1, а затем пиковым детектором Д2. В интервалах между импульсами полезного сигнала могут возникать помехи, в этом случае АРУ действует на все сигналы, включая помехи. Для устранения этого явлений цепь АРУ подключают только на время действия полезного сигнала, т.е. используют стробирование, когда видеоусилитель открывается стробирующим импульсом. Этот импульс формируется передатчиком РЛС.
В радиолокационных системах в ряде случаев появляется необходимость применения программной АРУ. В первую очередь эта ситуация возникает, когда на вход приемника поступают сигналы различных амплитуд, отраженные от объектов расположенных на различных дальностях. Если усиление радиотракта выбрано исходя из обеспечения приема относительно слабых сигналов, то импульсы отраженные от ближних объектов и имеющие большую амплитуду вызывают перегрузку тракта приемника. При выборе усиления по сильному сигналу будет затруднен прием слабых сигналов. В этом случае целесообразно изменять коэффициент усиления по определенной программе. В РЛС сопровождения, где координаты объекта определяются методом равносигнальной зоны, система АРУ не должна реагировать на полезную амплитуднаю модуляцию радиоимпульсов и управляется только средним значением отраженных сигналов, зависящих от дальности цели. В этом случае постоянная времени системы АРУ должна быть значительно больше периода развертки луча антенны. Другими словами регулировка усиления должна быть инерционна.
Выделение полезных сигналов из всего многообразия принимаемых антенной осуществляется с помощью специального селекторного каскада, которым может быть УПЧ или видеоусилитель. Большую часть времени селекторный каскад заперт и открывается лишь пред приходом сигнала, отраженным от сопровождаемой цели с помощью селекторного импульса.
Схема радиолокационного приемника с инерционной АРУ может быть представлен в следующем виде.
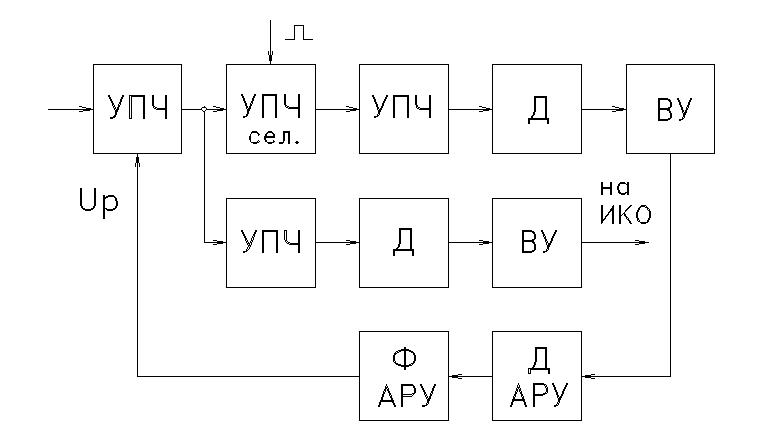
В канал дальности и затем на индикатор кругового объема поступают все сигналы с нестробируемых УПЧ и на индикаторе отражается воздушная обстановка. На детектор же АРУ поступают сигналы от определенной цели и после детектирования детектором с большой постоянной времени преобразуются в постоянное напряжение, поступающее на регулируемые УПЧ. По мере уменьшения расстояния до цели растет амплитуда отраженных сигналов, но под действием системы АРУ коэффициент усиления регулируемых каскадов уменьшается, сохраняя примерно постоянной амплитуду сигналов от выбранной цели.