

Пример №1 выполнения РГР по Устойчивости СЭ
.docФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Владимирский государственный университет
Кафедра «Электротехника и электроэнергетика»
Расчётно-графическая работа
По дисциплине «Устойчивость систем электроснабжения»
Выполнил: Ст. гр. ЗЭС93–108 Файхутдинов М.Ю.
Проверил: доцент, к.т.н. Шмелёв В.Е.
Владимир – 2009
Вариант Z.
Задание.
Дана электронная схема, изображённая на рис. 1 и состоящая из двух операционных усилителей и однофазного трансформатора. Трансформатор представлен в виде схемы замещения, учитывающей основные и паразитные параметры.
Определить устойчивость электронной схемы тремя способами:
1. Путём непосредственного определения полюсов передаточной функции замкнутой системы;
2. По критерию Рауса;
3. По критерию Найквиста.
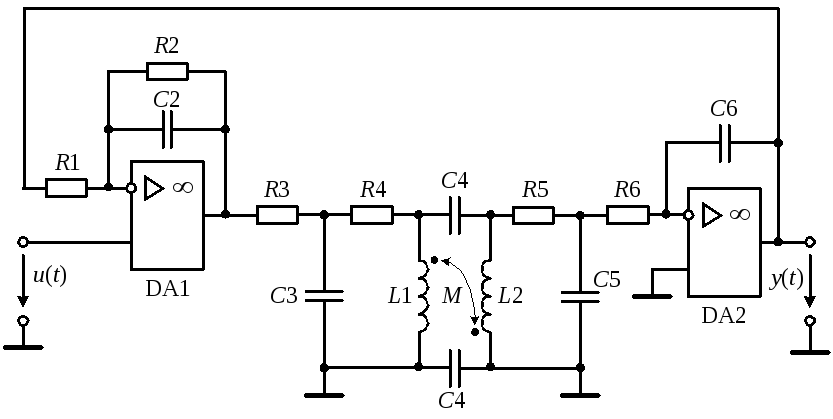 Рис.
1. Функциональная схема электронной
динамической системы
Рис.
1. Функциональная схема электронной
динамической системы
Параметры схемы для данного варианта имеют следующие значения:
R1 = 2 кОм;
R2 = 10 кОм;
R3 = 10 Ом;
R4 = 20 Ом;
R6 = 2 кОм;
C2 = 1 нФ;
C3 = 400 пФ;
C4 = 50 пФ;
C6 = 6 нФ;
Коэффициент электромагнитной связи обмоток трансформатора kэм = 0.99;
Индуктивность первичной обмотки L1 = 1 Гн = 1000 мГн; коэффициент трансформации kT = 1.
В расчётах для удобства сопротивления будем записывать в килоомах, индуктивности – в миллигенри, ёмкости – в нанофарадах, тогда время будет измеряться в микросекундах, частота – в мегагерцах, циклическая частота – в рад/мкс, комплексная частота – в мкс-1.
Рассчитаем индуктивность вторичной обмотки: L2 = L1/kT2 = 1000 мГн.
Рассчитаем взаимную индуктивность обмоток трансформатора:
![]() =
0.99 Гн = 990 мГн.
=
0.99 Гн = 990 мГн.
В соответствии с заданием способ намотки обмоток трансформатора таков, что ёмкость вторичной обмотки связана с ёмкостью первичной обмотки соотношением C5 = C3/kT2. Рассчитываем C5 = 400 пФ = 0.4 нФ.
Способ намотки обмоток трансформатора таков, что сопротивление вторичной обмотки связано с сопротивлением первичной обмотки соотношением R5 = R4/kT. Рассчитываем R5 = 20 Ом = 0.02 кОм.
Функциональной электрической схеме, изображённой на рис. 1, соответствует структурная схема динамической системы, изображённая на рис. 2. Здесь обозначено: H1(s) – передаточная функция усилительного каскада (DA1, R1, R2, C2) по неинвертирующему входу; H2(s) – передаточная функция того же каскада по инвертирующему входу, она выполняет роль передаточной функции отрицательной обратной связи; H3(s) – передаточная функция трансформатора; H4(s) – передаточная функция усилительного каскада (DA2, R6, C6).
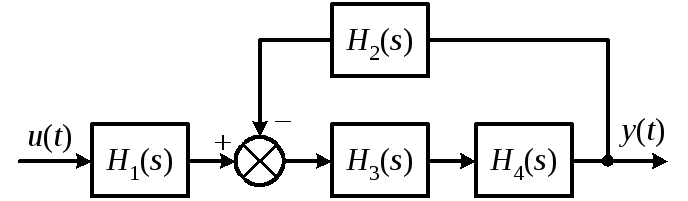 Рис.
2. Структурная схема анализируемой
динамической системы
Рис.
2. Структурная схема анализируемой
динамической системы
Для анализа устойчивости работы динамической системы нужно определить все названные передаточные функции.
 ;
;
![]() ;
;
![]() .
.
Чтобы рассчитать передаточную функцию H3(s), нужно выполнить анализ схемы замещения трансформатора операторным методом. Воспользуемся системой MATLAB и вычислительным сценарием cepye, подключив к нему Symbolic Mach Toolbox. В командном окне MATLAB выполним следующую последовательность операторов:
s=tf([1 0],1);
TM=[1 1 0 0 0 0 0 0; 0 -1 1 1 0 0 0 0; 0 0 0 -1 1 1 0 0; 0 0 0 0 0 -1 1 1];
pv=[tf(0.01) (tf(0.4)*s)^-1 tf(0.02) tf(1000)*s (tf(0.05)*s)^-1 tf(1000)*s tf(0.02) (tf(0.5)+tf(0.4)*s)^-1];
for iii=1:size(TM,2), PV(iii,iii)=pv(iii); end
PV(4,6)=-tf(990)*s;
PV(6,4)=-tf(990)*s;
PM=TM*PV*TM.'; % Матрица контурных сопротивлений
PS=TM.'/PM*TM; % Матрица входных и взаимных проводимостей ветвей
KS=-PS*PV; % Матрица коэффициентов передачи тока
KC=PV*PS-eye(size(PV)); % Матрица коэффициентов передачи напрqжения.
PC=PV*KS+PV; % Матрица входных и взаимных сопротивлений ветвей
H3=minreal(KC(8,1));
H3=minreal_sh(H3)
Переменная TM соответствует матрице главных контуров схемы замещения трансформатора, равной
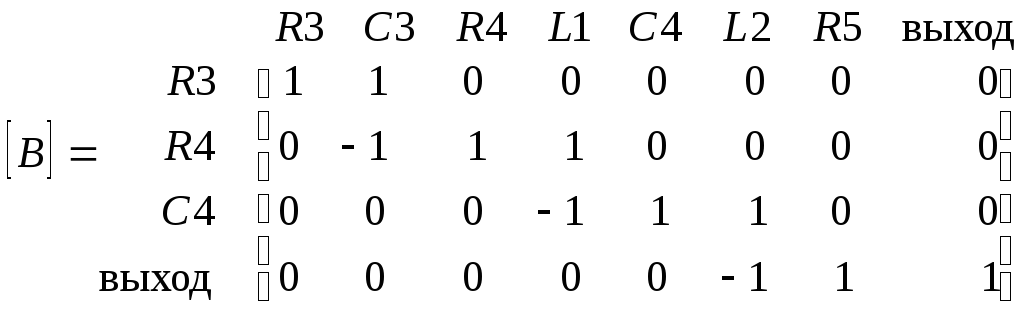
После выполнения записанной последовательности операторов в командном окне появится выражение для передаточной функции трансформатора H3:
Transfer function:
1.563e004 s^4 + 1.104e-005 s^3 - 1.555e004 s^2 + 5.953e-008 s - 0.0001487
-------------------------------------------------------------------------
s^6 + 876.3 s^5 + 1.416e005 s^4 + 1.567e005 s^3 + 1.61e004 s^2 + 0.3466 s
Переменная H3 будет содержать tf- выражение искомой передаточной функции H3(s). Введём в ЭВМ передаточные функции усилительных каскадов:
H1=(tf(6)+tf(10)*s)/(tf(1)+tf(10)*s);
H2=tf(5)/(tf(1)+tf(10)*s);
H4=-tf(1)/s/tf(12);
Посчитаем передаточную функцию замкнутой системы без учёта H1(s):
W=minreal(H3*H4/(1+H2*H3*H4));
W=mineral_sh(W)
Transfer function:
-1302 s^6 - 2.764e005 s^5 - 2.633e004 s^4 + 2.75e005 s^3 + 2.749e004 s^2
+ 0.003309 s + 0.000263
-------------------------------------------------------------------------------
s^9 + 1089 s^8 + 3.277e005 s^7 + 3.024e007 s^6 + 3.629e007 s^5 + 6.604e006 s^4
+ 3.423e005 s^3 + 1.375e005 s^2 + 0.0009338 s + 0.001315
Определим корни знаменателя этой передаточной функции:
[b,a]=tfdata(W,'v');
ss=roots(a)
ss =
-662.96
-212.18
-212.18
-0.99888
-0.25759
0.021515 + 0.13204i
0.021515 - 0.13204i
Расчёт импульсной характеристики показал, что передаточная функция W(s) имеет семь полюсов. Два из этих полюсов имеют положительную действительную часть, следовательно, анализируемая динамическая система неустойчива. Передаточная функция H1(s) не охвачена обратной связью и не содержит правых и мнимых полюсов, значит, она не влияет на устойчивость динамической системы. Поэтому при анализе устойчивости передаточная функция H1(s) не учитывалась.
Для подтверждения сказанного покажем последовательность операторов и сообщений в командном окне MATLAB при построении графика импульсной характеристики замкнутой системы с учётом передаточной функции H1(s).
W1=minreal(H1*W);
W1=mineral_sh(W1)
impulse(W1,3/min(abs(real(ss))))
grid on
set(findobj('type','line'),'linewidth',2,'color',[0 0 0])
Передаточная функция замкнутой системы W1 имеет вид
Transfer function:
-1302 s^4 - 2.771e005 s^3 - 1.645e005 s^2 + 2.757e005 s + 1.649e005
-------------------------------------------------------------------------------
s^7 + 1089 s^6 + 3.277e005 s^5 + 3.024e007 s^4 + 3.629e007 s^3 + 6.604e006 s^2
+ 3.423e005 s + 1.375e005
График импульсной характеристики замкнутой системы показан на рис. 3. Видно, что неустойчивость проявляется в виде раскачки колебаний.
 Рис.
3. Импульсная характеристика замкнутой
системы
Рис.
3. Импульсная характеристика замкнутой
системы
Проведём анализ устойчивости вторым способом. Составим таблицу (матрицу) Рауса для передаточной функции W1(s). Для этого сначала в массив-строку с именем a запишем коэффициенты полинома знаменателя передаточной функции W1:
[b,a]=tfdata(W1,'v')
b =
Columns 1 through 6
0 0 0 -1302.1 -2.7706e+005 -1.6447e+005
Columns 7 through 8
2.7567e+005 1.6494e+005
a =
Columns 1 through 6
1 1088.5 3.2768e+005 3.0244e+007 3.6291e+007 6.6042e+006
Columns 7 through 8
3.4225e+005 1.3745e+005
r=raus(a)
r =
1 3.2768e+005 3.6291e+007 3.4225e+005
1088.5 3.0244e+007 6.6042e+006 1.3745e+005
2.9989e+005 3.6284e+007 3.4213e+005 0
3.0112e+007 6.6029e+006 1.3745e+005 0
3.6219e+007 3.4076e+005 0 0
6.3196e+006 1.3745e+005 0 0
-4.4701e+005 0 0 0
1.3745e+005 0 0 0
Видно, что в первом столбце этой матрицы имеет место две перемены знака чисел. Из этого следует, что число правых полюсов передаточной функции W(s) равно двум. Это означает, что анализируемая система неустойчива. В предыдущем способе анализа также было найдено два правых комплексных полюса.
Использованная в данной последовательности операторов m-функция raus содержит следующие операторы MATLAB:
% raus - Составление матрицы Рауса для полинома
% r=raus(p)
% p - массив-строка коэффициентов полинома, для которого
% составляется матрица Рауса
% r - матрица Рауса
function r=raus(p)
n1=length(p); % длина массива коэффициентов полинома
n2=ceil(n1/2); % число столюцов матрицы Рауса
r=zeros(n1,n2); % распределяем память под матрицу Рауса
if p(1)==0, return, end
if mod(n1,2)==0 % если длина полинома чётная
r([1,2],:)=reshape(p,2,n2);
else
r([1,2],:)=reshape([p,0],2,n2);
end % if mod(n1,2)==0
% Цикл вычислений. Анализируется особые случаи
for k=3:n1
if ~any(r(k-1,:)), r(k-1,:)=r(k-2,:).*(n1-k+2-(0:n2-1)*2); end
if r(k-1,1)==0, r(k-1,1)=eps(max(abs(r(k-1,:))))*sign(r(k-2,1)); end
r(k,1:end-1)=-r(k-2,1)/r(k-1,1)*r(k-1,2:end)+r(k-2,2:end);
end
Проведём анализ устойчивости третьим способом. Рассчитаем передаточную функцию разомкнутой системы, равную произведению передаточных функций элементов контура структурной схемы с отрицательной обратной связью.
Hp(s)
= H2(s)H3(s)H4(s)
= =![]() .
.
В командном окне MATLAB выполним последовательность операторов
om=logspace(-3,1,1001);
Hr=H2*H3*H4;
[b,a]=tfdata(Hr,'v');
Hrom=polyval(b,1i*om)./polyval(a,1i*om);
Lr=20*log10(abs(Hrom));
Pr=angle(-Hrom)-pi;
subplot(2,1,1)
semilogx(om,Lr,'k-','linewidth',2)
grid on
subplot(2,1,2)
semilogx(om,Pr*180/pi,'k-','linewidth',2)
grid on
В результате в одной фигуре MATLAB будет построено два графика: ЛАЧХ и ЛФЧХ разомкнутой системы (рис. 4). По графику или с помощью интерполяции ЛФЧХ определим частоту (рад/мкс), на которой ЛФЧХ проходит через -180О:
om1=interp1(Pr,om,-pi,'cubic')
om1 =
0.097069
По графику или с помощью интерполяции определим частоту (рад/мкс), на которой модуль коэффициента передачи сигнала равен 0 дБ:
om2=interp1(Lr,om,0,'cubic')
om2 =
0.14418
Модуль коэффициента передачи сигнала (дБ) на частоте om1 определяется оператором:
D1=interp1(om,Lr,om1,'cubic')
D1 =
7.162
Это означает, что система неустойчива. Дефицит устойчивости по модулю составляет 7.162 дБ.
Дефицит устойчивости по фазе (в градусах) определяется по значению ЛФЧХ на частоте om2 оператором:
D2=(-pi-interp1(om,Pr,om2,'cubic'))*180/pi
D2 =
25.049
Дефицит устойчивости по фазе составляет 25.049 градусов.
Вывод. Анализ устойчивости динамической системы тремя методами дал один и тот же результат: система неустойчива. Первый из этих трёх методов наиболее универсален, но обязательно требует применения вычислительной техники и современного математического ПО. Второй из этих методов не требует применения вычислительной техники и позволяет определить число правых полюсов передаточной функции замкнутой системы. Однако этот метод не позволяет анализировать динамические системы с элементами чистого запаздывания. Этого недостатка лишён третий метод анализа, который также не требует применения вычислительной техники и, кроме всего прочего, позволяет определить запас или дефицит устойчивости по модулю и по фазе, что бывает важно при выборе и синтезе корректирующих устройств.
 Рис.
4. ЛАЧХ (сверху) и ЛФЧХ (снизу) разомкнутой
системы
Рис.
4. ЛАЧХ (сверху) и ЛФЧХ (снизу) разомкнутой
системы