

4. Переходная функция.
h(t) = L-1[W(s)/s] = L-1[T] = T·δ(t)
Таким образом, реакция дифференцирующего звена на ступенчатую функцию – это короткий импульс.
5. Весовая функция.
w(t) = L-1[W(s)] = L-1[T·s] = T·dδ(t)/dt
Переходную и весовую функцию дифференцирующего звена трудно изобразить графически, и тем более сложно представить, каков отклик (реакция) этого звена на входное воздействие. Поэтому рассмотрим отклик дифференцирующего звена на линейное (нарастающее) входное воздействие:
х(t) = t Х(s) = 1/s2.
у(t) = L-1[W(s)·Х(s)] = L-1[T·s/s2] = L-1[T/s] = T·1(t).
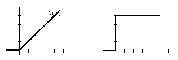
Другими словами, если на вход дифференцирующего звена подать линейно нарастающий сигнал, то в момент подачи сигнала на выходе мы будем иметь скачок выходного сигнала с 0 до T.
6. Частотные характеристики.
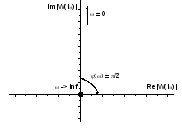
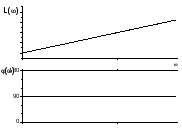
Рис. 5.1. АФЧХ, ЛАХ и ЛФХ дифференцирующего звена.
W(jω) = T·j·ω = 0 + Tω·j
A(ω) = Tω
φ(ω) = arctg(Tω/0) arctg(∞) = π/2
L(ω) = 20lg[A(ω)] = 20lg(Tω).
Как видим, частотные характеристики дифференцирующего звена обратны частотным характеристикам интегрирующего звена.
22. 23. Структурные схемы систем автоматического управления
Систему автоматического управления можно рассматривать как комбинацию динамических звеньев (типовых и нетиповых). Каждое звено имеет определенное математическое описание, выраженное чаще всего в виде передаточной функции W(s). Зная математическое описание звеньев и связи между ними, всегда можно получить математическое описание всей системы в целом. Для представления системы управления с помощью динамических звеньев используют структурные схемы.
Дадим определение структурной схемы. Структурной схемой называется изображение системы управления в виде совокупности типовых и нетиповых динамических звеньев с указанием связей между ними.
Основными элементами структурных схем являются следующие.
1. Динамическое звено. Звено в структурной схеме выступает как элементарная структурная единица, преобразователь информации (сигнала). В поле звена указывается его математическое описание (передаточная функция W(s)).
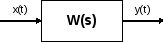
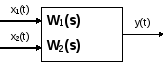
Как правило, звено имеет один вход и один выход, однако допускается также использование в структурных схемах звеньев с несколькими входами и одним выходом. Тогда возле каждого входа указывается своя передаточная функция. Выходной сигнал в этом случае будет определяться выражением:
Y(s) = W1(s)X1(s) + W2(s)X2(s) + …
2. Линия передачи сигнала (линия связи). Устанавливает связь между звеньями. Стрелка указывает направление передачи сигнала.

3. Разветвление (узел). Используется, когда один и тот же сигнал поступает на разные звенья системы управления.

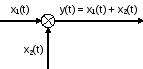
4. Сумматор. Используется, когда сигналы преобразуются в новый сигнал, равный сумме исходных. Поскольку сигналы в одной системе управления могут иметь разную физическую природу, то следует особо отметить, что суммируемые сигналы должны иметь одинаковую размерность (нельзя, например, складывать электрическое напряжение с током).

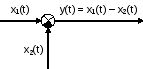
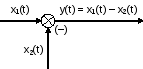
5. Элемент сравнения. Формирует сигнал, равный разности входных сигналов. Элемент сравнения можно рассматривать как сумматор с инвертированным входом. Встречается два варианта обозначения вычитаемого сигнала, поступающего на вход элемента сравнения: 1) сектор, соответствующий входу вычитаемого сигнала, выделяется цветом; 2) вход вычитаемого сигнала указывается знаком минус.
. Преобразование структурных схем
При расчетах систем автоматического управления может возникнуть необходимость в преобразовании структурной схемы для приведения ее к более простому виду или к виду, более удобному для решения некоторой конкретной задачи. Исходная и преобразованная структурные схемы должны быть эквивалентными, т.е. одинаковым образом отражать динамические свойства системы управления.
Любая структурная схема включает в себя последовательно и параллельно соединенные звенья, а также элементы соединенные обратной связью. Звенья соединенные подобным образом можно заменить на одно звено, имеющее эквивалентную передаточную функцию.