Вопросы для контроля знаний по дисциплине «Теория автоматического управления»
Понятие о замкнутых автоматических системах.
Классификация автоматических систем по характеру внутренних динамических процессов.
Программы управления.
Нелинейные алгоритмы управления.
Линеаризация дифференциальных уравнений систем автоматического управления.
Формы записи линеаризованных уравнений звеньев.
Динамические звенья и их характеристики.
Временные характеристики.
Частотная передаточная функция и частотные характеристики.
Логарифмические частотные характеристики.
Позиционные звенья. Апериодическое звено первого порядка.
Позиционные звенья. Апериодическое звено второго порядка.
Позиционные звенья. Колебательное звено.
Позиционные звенья. Консервативное звено .
Интегрирующие звенья. Идеальное интегрирующее звено.
Интегрирующие звенья. Интегрирующее звено с замедлением.
Интегрирующие звенья. Изодромное звено.
Дифференцирующие звенья.
Неустойчивые и минимально-фазовые звенья.
Общий метод составления исходных уравнений.
Передаточные функции систем автоматического управления.
Использование структурных схем. Последовательное соединение звеньев.
Использование структурных схем. Параллельное соединение звеньев.
Уравнения состояния.
Управляемость и наблюдаемость.
Многомерные системы управления.
Критерии устойчивости. Общие сведения об устойчивости.
Критерий устойчивости Гурвица.
Построение областей устойчивости. D- разбиение.
Критерий устойчивости Найквиста.
Определение устойчивости по логарифмическим частотным характеристикам.
Понятие о замкнутых автоматических системах.
В замкнутых САУ на вход УУ подаются задающее воздействие G и выходная величина объекта Х. Исходя из величины G, УУ определяет соответствующее требуемое значение Х и, имея информацию о текущем значении Х, обеспечивает необходимое соответствие между Х и G путем воздействия на объект.
В такой САУ УУ стремится ликвидировать все отклонения Х от его значения, определяемого заданием G, независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
САУ такого типа представляют собой замкнутый контур, образованный объектом и УУ. При этом УУ создает обратную связь вокруг объекта, связывая его выход со входом. Замкнутые САУ называются поэтому еще системами с обратной связью или системами управления по отклонению.
Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
На рис.5 показана в качестве примера замкнутая система управления напряжением синхронного генератора.

УУ состоит из измерителя напряжения ИН, который включает в себя тр-р напряжения ТН с выпрямителем и является чувствительным устройством; устройства задания величины напряжения UЗ в виде делителя напряжения RЗ, питаемого стабилизированным напряжением, и усилителя У, являющегося одновременно и исполнительным устройством, воздействующим на объект. ВУ в схеме на рис.5 представляет собой простейшую схему сравнения напряжений U и UЗ на входе усилителя, определяющую разность U = UЗ – U.
Напряжение U постоянного тока на выходе измерителя напряжения ИН однозначно связано с напряжением генератора UГ. Когда U = UЗ, сигнал U на входе усилителя У равен нулю и УУ не действует на генератор, являющийся объектом управления. Если по какой-либо причине, например, вследствие изменения нагрузки генератора или скорости его вращения, напряжение генератора изменится, на входе усилителя появится напряжение U соответствующей величины и знака. В результате на выходе усилителя возникает напряжение, которое изменит ток возбуждения генератора, что приведет к возврату напряжения генератора к исходному значению.
Если в схеме на рис.5 вместо делителя напряжения RЗ поставить УЗГ, получится замкнутая система программного управления напряжением генератора.
Классификация автоматических систем по характеру внутренних динамических процессов.
Все системы управления и регулирования делятся по различным признакам на следующие основные классы.
По принципу действия:
- разомкнутые системы;
- замкнутые системы;
- комбинированные системы;
- адаптивные системы.
По виду задающего воздействия g(t):
- системы стабилизации, если g(t) = const;
- системы программного управления, если g(t) – наперед заданная функция времени;
- следящие системы, если g(t) – случайная величина.
По математическому описанию:
- линейные системы;
- нелинейные системы.
В схеме САУ, изображенной на рис.1, на УУ поступают три вида информации: информация о величине Х, определяющей состояние объекта, информация о величине G, задающей цель управления, информация о F – возмущениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ – разомкнутые системы и замкнутые системы.
В разомкнутых САУ выходная величина объекта Х не измеряется, т.е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что вследствие этого в них отсутствует обратная связь между выходом объекта и входом УУ, при наличии которой объект и УУ образуют замкнутый контур.
Обратная связь – это такая связь, при которой информация о состоянии управляемого объекта передается с выхода системы на вход УУ.
Возможны разомкнутые САУ, в которых УУ измеряет только одно задающее воздействие G, одно возмущение F и, наконец, оба эти сигнала одновременно.
В первом варианте разомкнутой САУ управление осуществляется по задающему воздействию: поступающие извне команды G приводят путем изменения управляющего воздействия U к соответствующему изменению выходной величины объекта Х. Точность обеспечиваемого при этом соответствия между Х и G целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работы системы и невысоких требованиях к точности.
6. Формы записи линеаризованных уравнений звеньев.
В ТАУ приняты определенные формы записи линеаризованных дифференциальных уравнений звеньев. При этом уравнение (2.1) (с учетом только приведенных там членов) должно записываться так:
 . (2.2)
. (2.2)
Здесь
 -
оператор дифференцирования по времени;
-
оператор дифференцирования по времени;
 - приращения
переменных в относительных единицах;
- приращения
переменных в относительных единицах;
 -
коэффициенты передачи;
-
коэффициенты передачи;
 - постоянные
времени.
- постоянные
времени.
Особенности
приведенной формы записи заключаются
в следующем. Выходная величина и ее
производные находятся в левой части
уравнения, а входная величина и ее
производные – в правой. Коэффициент
при приращении выходной величины равен
единице [в результате деления обеих
частей уравнения на
 ].
].
Коэффициенты левой части уравнения – постоянные времени. Размерность их – секунда в степени, равной порядку производной, перед которой стоит данный коэффициент.
Другой формой записи линейных уравнений звеньев является запись с помощью передаточной функции. Уравнение (2.2) при этом принимает вид:
 ,
,
или
 ,
,
где
 . (2.3)
. (2.3)
Дробь W(p) называется передаточной функцией звена. Пока будем рассматривать ее просто как удобный способ записи дифференциальных уравнений. Полное определение передаточной функции дам дальше, когда будем рассматривать преобразование Лапласа.
Рассматривая выше формы записи уравнений, принятые в ТАУ, мы оперировали для определенности уравнением 2-го порядка с одной входной величиной х. Однако в результате линеаризации реальных звеньев могут быть получены уравнения любого порядка. В общем случае звено САУ, имеющее n входов, описывается дифференциальным уравнением
 , (2.3,а)
, (2.3,а)
или в другом виде
 .
.
Здесь xi
– входные воздействия на звено (i
= 1,2,…,n);
Q(p)
и Ri(p)
– полиномы относительно р;
 - передаточная функция звена дляi
– го входного воздействия.
- передаточная функция звена дляi
– го входного воздействия.
7. Типовые динамические звенья систем автоматического управления
Что такое динамическое звено? На предыдущих занятиях мы рассматривали отдельные части системы автоматического управления и называли их элементами системы автоматического управления. Элементы могут иметь различный физический вид и конструктивное оформление. Главное, что на такие элементы подается некоторый входной сигнал х(t), и как отклик на этот входной сигнал, элемент системы управления формирует некоторый выходной сигнал у(t). Далее мы установили, что связь между выходным и входным сигналами определяется динамическими свойствами элемента управления, которые можно представить в виде передаточной функции W(s). Так вот, динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое описание, т.е. для которого известна передаточная функция.

а)
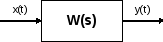
б)
Рис. 3.4. Элемент (а) и динамическое звено (б) САУ.
Типовые динамические звенья – это минимально необходимый набор звеньев для описания системы управления произвольного вида. К типовым звеньям относятся:
пропорциональное звено;
апериодическое звено I-ого порядка;
апериодическое звено II-ого порядка;
колебательное звено;
интегрирующее звено;
идеальное дифференцирующее звено;
форсирующее звено I-ого порядка;
форсирующее звено II-ого порядка;
18. Дифференцирующее звено
1. Передаточная функция.
Передаточная функция дифференцирующего звена имеет вид:
W(s) = T·s где T – постоянная времени (время дифференцирования).
2. Математическое описание звена.
Дифференцирующее звено описывается уравнением, в котором встречается производная от входного сигнала:
у = T·dх(t)/dt
Это не дифференциальное уравнение, поскольку входной сигнал х(t) и его производные полагаются заранее известными.
3. Физическая реализация звена.
Сразу отметим, что идеальное дифференцирующее звено физически нереализуемо. Вообще, любая передаточная функция с порядком числителя большим порядка знаменателя является физически нереализуемой. Укажем, какие факторы могут воспрепятствовать физической реализуемости:
нарушение причинности – выходной сигнал появляется раньше входного;
нереализуемая частотная характеристика, например, не стремящаяся к нулю при бесконечно больших частотах;
появление на выходе бесконечных значений сигналов при подаче физически реализуемых сигналов.
Строго говоря, физически нереализуемой является и ПФ с порядком числителя равным порядку знаменателя. Как мы видели ранее, даже идеальный усилитель не может быть физически реализован, не говоря уже об идеальном дифференцирующем звене, так как в обоих случаях АЧХ не стремятся к нулю при росте частоты.
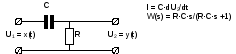
Поскольку идеальное дифференцирующее звено физически нереализуемо, при этом сама операция дифференцирования часто встречается при описании процессов разной природы, то на практике часто используют "нетиповое" реальное дифференцирующее звено. Реальное дифференцирующее звено является соединением двух типовых звеньев - идеального дифференцирующего и инерционного, которые вместе приближённо описывающих операцию дифференцирования. Передаточная функция реального дифференцирующего звена имеет вид:
W(s) = T1s/(T2s + 1), где T1 – постоянная времени дифференцирующей составляющей (время дифференцирования), а T2 – постоянная времени апериодической составляющей. При малых значениях T2, т.е. когда инерционность апериодического звена мала, составляющей T2s в знаменателе передаточной функции можно пренебречь, тогда мы получим приближенную передаточную функцию идеального дифференцирующего звена:
W(s) = T1s/(T2s + 1) ≈ T1s.
Такое звено хорошо работает при низких частотах. Максимальная частота, при которой реальное дифференцирующее звено еще работает "почти как идеальное" равна:
ω = 1/T2.
Примерами дифференцирующего звена являются дифференцирующая цепочка, дифференцирующий трансформатор, операционный усилитель в режиме дифференцирования.