

Axm,Bar,Vav_2002
.pdf4.2. Подготовка к рабочему заданию
1. Записать паспортные данные исследуемого однофазного синхронного реактивного двигателя.
2. Записать формулы для расчета величин, предусмотренных рабочим заданием.
3. Сделать заготовку отчета по данной лабораторной работе. 4.3. Рабочее задание
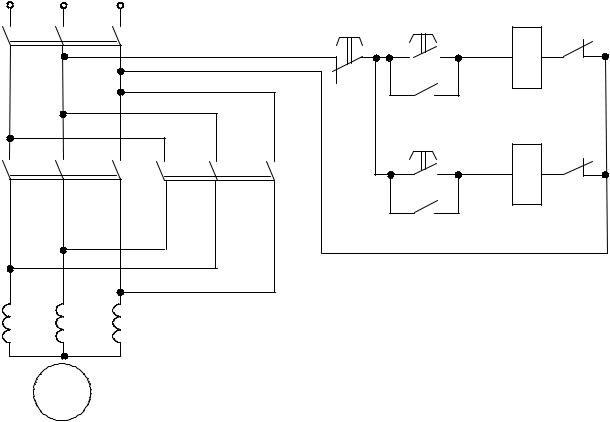
1. Получить характеристики холостого хода реактивного двигателя. Для этого собрать цепь согласно схеме, представленной на рис. 6.3.
Т |
PW |
PА |
|
СД |
|
250 |
С2 |
С1 |
|||
|
|
||||
|
W |
A |
|
|
|
V |
|
СП |
|
П1 |
|
|
1 мкФ |
|
|||
0 |
|
|
|
П2 |
|
|
|
|
|
С1, C2 - начало и конец главной обмотки;
П1, П2 - начало и конец вспомогательной обмотки.
Рис. 6.3
Установить на зажимах статора номинальное напряжение. Далее при вращающемся с синхронной скоростью роторе
постепенно понижают напряжение с помощью автотрансформатора
до значения U1 = (0,6 ÷ 0,7)Uн , |
записывая в табл. 6.1 показания всех |
|||||||||
приборов. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Таблица 6.1 |
|
|
|
|
|
Измерено |
|
|
|
Вычислено |
|
|
|
n, |
|
U0 , |
|
I0 , |
|
P0 , |
|
cos ϕ0 = P0 /U0 I0 |
|
|
об/мин |
|
|
|
|
|
||||
|
|
|
B |
|
A |
|
Bт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
По данным опыта строятся в одной системе координат |
||||||||||
характеристики холостого хода: |
|
|
||||||||
I0 = f (U0 ), |
P0 = f (U0 ), |
cos ϕ0 = f (U0 ) |
при f = const. |
|||||||
2. Получить характеристики короткого замыкания.
Опыт проводится при неподвижном роторе по схеме рис. 6.3. При этом опыте в цепи статора устанавливается вольтметр для
напряжений |
Uк = (0,25 ÷ 0,35)Uн . |
Удерживая |
вал двигателя от вращения рукой со стороны |
электромагнитного тормоза, увеличивают напряжение на обмотке статора от нуля до значения, при котором ток статора достигает величины Iк = (1,11÷1,25)Iн , из-за наличия выступающих полюсов на роторе показания приборов в зависимости от положения последнего могут быть различными. Вначале ротор устанавливают в положение, при котором ток в обмотке статора достигает максимального значения, и производят замер соответствующих экспериментальных данных. Затем опыт повторяют при тех же значениях Uк для положения ротора, при котором ток в обмотке достигает минимального значения.
В табл. 6.2 записываются средние значения показаний приборов.
Таблица 6.2
|
|
|
|
|
|
|
|
|
Измерено |
|
|
|
|
|
|
|
Вычислено |
|||||||
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos ϕ |
|
= |
|
Pк ср |
|
п.п. |
U |
к |
, |
I |
к max |
, |
P |
, |
I |
к min |
, |
P |
, |
I |
к ср |
, |
P |
, |
к |
|
||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
к max |
|
|
|
к min |
|
|
|
к ср |
|
|
|
UкIк ср |
|||||||
|
B |
|
|
A |
|
Вт |
|
|
А |
|
Вт |
|
|
А |
|
Вт |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По экспериментальным данным строятся в одной системе координат кривые характеристик короткого замыкания
Iк ср = f (Uк ), Pк ср = f (Uк ), cos ϕк = f (Uк ) .
Из данного опыта определяют значение пускового тока двигателя
Iпуск = Iк ср Uн ,
Uк
а также кратность пускового тока по отношению к номинальному
к = Iпуск ×100% .
Iн
3. Получить рабочие характеристики.
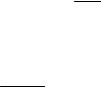
Собрать цепь согласно схеме, представленной на рис. 6.4. Перед началом опыта заменить вольтметр, установленный для опыта
короткого замыкания, прибором с пределом измерения, соответствующим номинальному напряжению.
А 220 |
В |
|
|
|
|
|
I* |
|
Тахометр |
|
Т |
|
|
|
|
||
U |
PW |
|
|
|
|
|
|
|
|
||
W U* |
|
|
V |
||
|
|
|
|||
|
I |
|
|
0 |
250 |
|
PV А |
PА |
|
|
|
|
V |
|
|
|
UZ |
|
|
|
|
|
|
|
|
С1 |
|
|
_ |
СП |
|
|
|
+ |
|
|
С2 |
ЭМТ |
|
||
1 мкФ |
|
|
|
||
|
|
|
|
|
|




 СД П1 П2
СД П1 П2 
UZ - выпрямитель; ЭМТ – электромагнитный тормоз; Т - лабораторный автотрансформатор; СД – ротор синхронного двигателя; Сп =1 мкФ- пусковой конденсатор
Рис. 6.4
Определение рабочих характеристик реактивного двигателя с помощью электромагнитного тормоза производится следующим образом. Пустив в ход двигатель, постепенно увеличить его нагрузку; для этого с помощью автотрансформатора повышая напряжение, подводимое через выпрямитель к обмотке электромагнитного тормоза. Постепенно загружая двигатель, довести ток статора до I = (1,1 ÷1,25)Iн . Сделать 5 - 6 измерений. Далее, увеличивая плавно нагрузку, определить точку выхода двигателя из синхронизма (см. методические указания п.4.3.3).
Данные измерений и вычислений занести в табл. 6.3. Таблица 6.3
|
|
Измерено |
|
|
|
|
|
Вычислено |
|
n, |
U , В |
I , А |
P , |
M |
2 |
, |
P , |
cos ϕ |
η, |
об/мин |
|
|
1 |
|
|
2 |
|
% |
|
|
|
|
Вт |
Нм |
|
Вт |
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полезная мощность на валу двигателя определяется выражением
P2 = πn M 2 , Вт
30
где М - полезный момент на валу двигателя, нМ; n2 - скорость вращения ротора, об/мин.
По данным опыта строятся в одной системе координат рабочие характеристики
I = f (P ), P = f (P ), M = f (P ), η = f (P ), |
||||
2 |
1 |
2 |
2 |
2 |
cos ϕ = f (P2 ) |
при U = const |
и частоте |
f = const . |
|
5. Методические рекомендации по выполнению рабочего задания и обработке результатов эксперимента
1.В опыте холостого хода и короткого замыкания необходимо изменять чувствительность ваттметра переключением обмотки напряжения на меньшие пределы, при этом необходимо следить, чтобы установленный предел не был меньше подаваемого в цепь напряжения.
2.В опыте короткого замыкания необходимо заменить вольтметр на более чувствительный.
3.Номинальный рабочий ток двигателя I = 0,22 А.
Дальнейшее увеличение нагрузки приводит к выходу двигателя из синхронизма, что можно определить с помощью тахометра по изменению скорости вращения ротора. Длительная работа двигателя в таком режиме недопустима.
6.Контрольные вопросы
1.Для чего необходим конденсатор в пусковой обмотке двигателя ?
2.Объясните принцип образования вращающегося магнитного поля в однофазных двигателях.
3.Для чего необходимо короткозамкнутая обмотка на роторе синхронного двигателя ?
4.Объясните принцип образования синхронного реактивного момента.
5.Почему синхронные реактивные двигатели имеют малый КПД и
соs ϕ ?
6. Область применения синхронных реактивных двигателей, их конструктивные особенности, достоинства.
Лабораторно-практическое занятие № 7
ИЗУЧЕНИЕ АППАРАТУРЫ И СХЕМ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ
1. Цель занятия
Изучение аппаратуры и наиболее характерных схем управления электроприводом переменного тока, приобретение навыков в сборке цепей различных систем управления и защиты.
2. Краткие теоретические сведения
Электрические аппараты (контакторы, пускатели, реле, кнопочные станции, путевые выключатели, плавкие предохранители и другие) входят в состав автоматических, полуавтоматических и ручных систем управления электротехнологическими установками, электроприводами, устройствами электрического освещения и т.д.
Их применяют для управления пуском, регулирования частоты вращения и осуществления электрического торможения электродвигателей. Электрические аппараты осуществляют функции контроля и защиты электроустановок.
Работа аппаратов электромеханического типа основывается на ряде физических явлений: взаимодействии ферромагнитных тел в магнитном поле, силовом воздействии проводника с током и магнитного поля, возникновения ЭДС в катушках и вихревых токах в массивных телах из электропроводящего материала при появлении переменного магнитного поля, тепловом действии электрического тока. Основными частями таких аппаратов являются: электрические контакты (неподвижные и подвижные, главные и вспомогательные), механический или электромагнитный привод контактной группы (приведение в соприкосновение и прижатие подвижных и неподвижных контактов), рукоятки (кнопки) управления и рабочие обмотки.
В электрических схемах все цепи делятся на две категории: на цепи главного тока, к которым относятся силовые цепи двигателей и генераторов, и вспомогательные цепи, которые включают в себя цепи управления, защиты, сигнализации и блокировки.

На рис. 7.1 представлена схема пуска асинхронного двигателя с короткозамкнутым ротором.
Последовательность переключений в схеме следующая.
При включении выключателя SA и нажатии кнопки SB1 ("Пуск") замыкается цепь катушки магнитного пускателя КМ1. По катушке пускателя КМ1 протекает ток и якорь пускателя КМ1 притягивается к сердечнику (магнитный пускатель срабатывает). При этом главные контакты КМ1.1 замыкаются и соединяют обмотку статора асинхронного двигателя с сетью. Одновременно замыкается блокировочный контакт КМ1.2, шунтирующий кнопку "Пуск" для того, чтобы сохранить цепь питания катушки пускателя после отхода кнопки SB1. Ротор двигателя начинает вращение.
A  B
B  C
C
SB1 |
SB2 |
KM1 |
|
SA
KM1.1
 C1
C1  C2
C2  C3
C3
KM1.2 |
 C4
C4  C5
C5  C6
C6
АД
Рис. 7.1
Остановка двигателя осуществляется путем нажатия кнопки SВ2 ("Стоп"). При этом размыкаются цепи катушки магнитного пускателя
КМ1.
Известно, что момент асинхронного двигателя при данном скольжении пропорционален квадрату напряжения, приложенного к обмотке статора. Отсюда можно сделать вывод, что на механические характеристики асинхронного двигателя сильное влияние оказывает изменение подводимого напряжения. В практике прибегают к снижению напряжения в процессе пуска двигателя различными приемами, например, переключением обмоток статора двигателя со
звезды на треугольник, введением сопротивления во все три фазы обмотки статора.
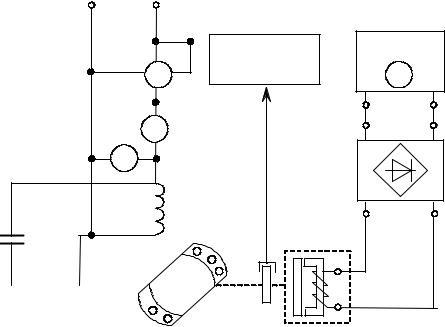
На рис. 7.2 представлена схема пуска асинхронного двигателя введением сопротивления в фазы статора.
Последовательность переключений в схеме следующая. После включения выключателя SA и нажатии кнопки SB3 замыкается цепь катушки магнитного пускателя КМ2. Магнитный пускатель срабатывает. Главные контакты КМ2.1 замыкаются и соединяют обмотки статора через сопротивление R1 с сетью. Одновременно замыкается блокировочный контакт КМ2.2, шунтирующий кнопку SB3. Двигатель переходит во вращение при пониженном напряжении и пусковом токе. Когда ротор двигателя набирает максимальные обороты, нажимают кнопку SB2. Кнопка SB2 замыкает цепь катушки КМ1. Главные кнопки КМ1.1 замыкаются и соединяют обмотки статора асинхронного двигателя непосредственно с сетью. Одновременно контакт КМ1.2 шунтирует SB2. Отключение двигателя осуществляется нажатием кнопки SB1 ("Стоп"). При этом размыкаются цепи катушек магнитных пускателей КМ1 и КМ2.
A |
B |
C |
|
|
|
|
SA |
|
|
|
SB1 |
SB2 |
KM1 |
РA А |
|
|
|
|
|
|
|
|
|
KM2.1 |
|
KM1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
SB3 |
KM2 |
KM1.1 |
|
|
|
|
|
|
|
|
R1 |
R2 |
R3 |
KM2.2 |
|
|
|
|
|
|||
С1 |
С2 |
С3 |
|
|
|
|
C4 |
C5 |
C6 |
|
|
|
|
|
АД |
|
|
|
|
|
|
|
|
|
Рис. 7.2 |
|
|
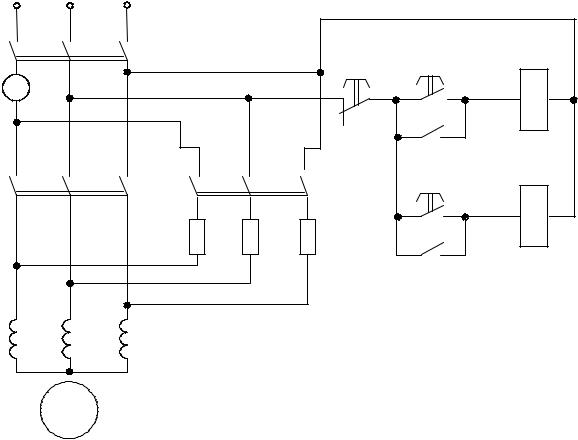
На рис. 7.3 представлена схема управления двигателем с реверсированием.
Последовательность переключений в схеме следующая. После включения выключателя SA и нажатии одной из кнопок SB2 или SB3 (в зависимости от необходимого начального направления вращения ротора двигателя) срабатывают магнитные пускатели КМ1 и КМ2. Главные контакты КМ1.1 или КМ2.1 соединяют обмотки статора М1 с сетью с одним или другим порядком чередования фаз (А,В,С или В,А,С). Ротор двигателя начинает вращение. Одновременно блокировочные контакты КМ1.2 или КМ2.2 шунтируют кнопки SB2 или SB3.
Для предотвращения одновременного включения контактов КМ1 и КМ2 (что привело бы к короткому замыканию в главной цепи) в цепи управления предусмотрена электрическая блокировка (в цепь катушки КМ1 включены нормально замкнутые контакты КМ2.3 пускателя КМ2, а в цепь катушки КМ2 включены нормально замкнутые контакты КМ1.3 пускателя КМ1).
Изменение направления вращения асинхронного двигателя осуществляется путем нажатия кнопки "Стоп" (SB1) и последующего нажатия кнопки SB2 или SB3.
A |
B |
C |
SB2 |
SA |
|
SB1 |
|
|
|
|
|
|
|
|
KM1.2 |
|
|
|
SB3 |
|
KM1.1 |
KM2.1 |
KM2.2 |
|
|
||
С1 |
С2 |
С3 |
|
C4 |
C5 |
C6 |
|
|
АД |
|
|
|
|
Рис. 7.3 |
|
KM1
KM2.3
KM2
KM1.3

3. Расчетная часть
3.1. Типовые задачи
Задача 1 На рис. 7.4 задан график изменения скорости вращения от нагрузки. Выбрать трехфазный асинхронный двигатель с короткозамкнутым ротором основного исполнения для работы с данной нагрузкой в длительном режиме, с учетом того, что оптимальная скорость вращения привода, близка к 1500 об/мин, напряжение питания сети 660 В, частота сети 50 Гц.
n об/мин
2000
1500
1000
500
0
20 40 60 80 100 M, Н·м
Рис. 7.4
Задача 2 Подобрать по каталогу трехфазный асинхронный двигатель с короткозамкнутым ротором основного исполнения для привода механизма, работающего с переменной нагрузкой (рис. 7.5). Частота вращения вала должна быть близкой к 1000 об/мин, напряжение питания сети 380 В, частота сети 50 Гц. Произвести проверку на перегрузочную способность.
M, Н·м
40
20
0
10 20 40 60 100 t, с tц
Рис. 7.5
Задача 3 Подобрать по каталогу трехфазный асинхронный двигатель с короткозамкнутым ротором основного исполнения для привода механизма, работающего в режиме, заданном нагрузочной диаграммой (рис. 7.6). Частота вращения вала должна быть близкой к 3000 об/мин, напряжение питания сети 380 В, частота сети 50 Гц .
M, Н·м
2,0
1,0
0
|
2,0 |
4,0 |
6,0 |
8,0 |
10,0 |
t, мин |
t1 |
t2 |
t3 |
t4 |
t5 |
t0 |
|
|
|
tц |
|
|
|
|
|
|
|
Рис. 7.6 |
|
|
|
4. Экспериментальная часть
4.1. Описание лабораторной установки
Работа выполняется на универсальном лабораторном стенде. Исследуемая установка состоит из трехфазного асинхронного двигателя с короткозамкнутым ротором, на валу которого установлен тахометр постоянного тока с выносным датчиком числа оборотов и панели управления.
Панель управления содержит два магнитных пускателя переменного тока КМ1 и КМ2, три кнопки выключателя SB1, SB2 и SB3. Обмотки электромагнитов магнитных усилителей пускателей рассчитаны на переменное напряжение 220 В. Контактные соединения выведены на соединительные гнезда. Измерение тока осуществляется прибором электромагнитной системы с пределом измерения 0 ÷ 500 mА.