

Axm,Bar,Vav_2002
.pdfуказанного в паспорте двигателя. Если пуск двигателя осуществляется вхолостую или с небольшой нагрузкой на валу, то пусковая емкость не требуется. Если же двигатель пускается в ход со значительной нагрузкой на валу, то необходима пусковая емкость Сп, подключаемая как указано на рис. 3.6 в. Величину этой емкости принимают Сп = (2,5 ÷3)Сраб . В этом случае пусковой момент двигателя
становится близким к номинальному. При необходимости дальнейшего увеличения пускового момента емкость Сп следует увеличить до
(6÷8)Сраб.
При использовании трехфазного двигателя в однофазном конденсаторном режиме его полезная мощность не превышает 60÷70 % от номинальной мощности при его работе от трехфазной сети.
3. Расчетная часть
3.1. Типовые задачи
Задача 1 Номинальная частота вращения ротора асинхронного двигателя nном = 1420 об/мин. Определить число пар полюсов двигателя, номинальное скольжение, частоту тока и ЭДС в обмотке вращающегося ротора, если частота напряжения сети f = 50 Гц.
Задача 2 К обмоткам статора трёхфазного асинхронного двигателя приложены следующие фазные напряжения:
& |
j0o |
& |
j120o |
& |
− j120o |
В. |
U A = Ue |
; |
U В = Ue |
; |
UС =Ue |
|
Определить, будет ли при этом вращаться ротор двигателя, если да, то в какую сторону?
Задача 3 На рисунке изображен паспортный щиток трехфазного асинхронного двигателя с короткозамкнутым ротором серии 5А. Определить мощность, потребляемую двигателем из сети, номинальные вращающий момент на валу двигателя и скольжение.
Двигатель асинхронный
Тип |
|
5А80МА4 |
|
|
|
№ |
6630152 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3ф - |
50 |
|
Гц |
|
|
|
|
|
380 |
|
V |
|
|
|
3,4 |
|
А |
||||||
|
kW |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1,1 |
1410 |
|
|
об/мин |
КПД |
|
73 |
|
% |
|
|
cos ϕ |
|
0,79 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Режим |
|
S1 |
|
|
Кл. изол. |
F |
|
|
|
|
|
13,0 |
|
кг |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
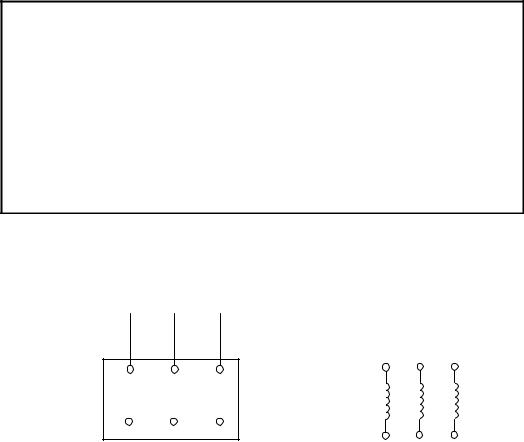
Задача 4 Начала и концы обмоток статора асинхронного двигателя выведены на щиток. Как нужно их соединить, чтобы обмотки статора были включены: а) звездой; б) треугольником.
C1 |
C2 |
C3 |
C1 |
C2 |
C3 |
|
|
|
|||
C4 |
C5 |
C6 |
C |
C5 |
C6 |
|
|
|
4 |
|
3.2. Задачи для самостоятельного решения
Задача 1 По заданным типоразмерам асинхронных двигателей определить частоту вращения поля статора и описать технические характеристики и условия эксплуатации этих двигателей:
4А80А2У3; АИР71В8; RA100LA4.
Примечание: для расшифровки типоразмера двигателя рекомендуется воспользоваться литературой [9].
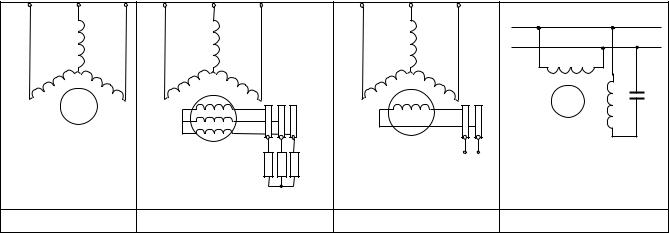
Задача 2 Из представленных схем двигателей переменного тока выбрать двигатель с фазным ротором и описать его конструкцию
|
|
- |
+ |
|
|
Rп |
|
1) |
2) |
3) |
4) |
4. Экспериментальная часть
4.1. Описание установки
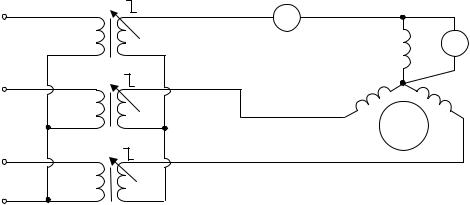
Работа выполняется на универсальном лабораторном стенде. Исследуемая установка состоит из статора обычного асинхронного двигателя и первичного элемента линейного асинхронного двигателя. Действие кругового вращающегося магнитного поля проявляется посредством вращения "беличьей клетки" или полого ротора. Действие бегущего магнитного поля обнаруживается при помощи вторичного элемента, выполненного в виде пластины из алюминия. Электроизмерительные приборы смонтированы на лицевой панели стенда. Питание исследуемых двигателей производится пониженным напряжением от трех однофазных регулируемых трансформаторов Т1, Т2, Т3, соединенных в "звезду" и питающихся от трехфазной сети
(220 В, 50 Гц).
4.2. Рабочее задание
Собрать электрическую цепь согласно схеме, представленной на рис.3.7.
A |
A |
Т1 |
a |
РА |
|
|
|
|
|
|
|
|
X |
|
x |
А |
РV |
|
|
|
V |
||
B |
B |
Т2 |
b |
|
|
|
Y |
|
y |
|
|
C |
C |
Т3 |
c |
|
|
|
|
|
|||
N |
Z |
|
z |
|
|
|
|
|
|
Рис. 3.7
Подключить статор обычного асинхронного двигателя. Вставить внутрь статора ротор, выполненный в виде "беличьей клетки". Включить цепь. Запомнить направление вращения ротора. Отключить цепь.
Поменять местами две фазы, питающие статорную обмотку двигателя. Обратить внимание на изменение направления вращения ротора. Отключить цепь. Вставить внутрь магнитопровода статора ротор, выполненный в виде полого цилиндра. Проделать задание согласно предыдущему опыту. Объяснить наблюдаемые явления.
Подключить вместо обычного асинхронного двигателя линейный асинхронный двигатель. Включить цепь. Поменять две фазы местами. Обратить внимание на изменение направления движения алюминиевой пластины.
5.Контрольные вопросы
1.Объяснить назначение и область применения трехфазных асинхронных двигателей вращательного и возвратнопоступательного движения.
2.Объяснить устройство и принцип действия трехфазного асинхронного двигателя с короткозамкнутым ротором.
3.Как осуществляется реверсирование трехфазных асинхронных двигателей ?
4.Как образуется вращающееся магнитное поле трехфазного асинхронного двигателя ?
5.Почему двигатель называется асинхронным ?
6.Объяснить устройство и принцип действия линейного асинхронного двигателя.

Лабораторно-практическое занятие № 4
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
1. Цель занятия
Экспериментальное исследование механической и рабочих характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором.
2. Краткие теоретические сведения
2.1. Принцип действия асинхронного двигателя
Асинхронный двигатель (АД) является электрической машиной переменного тока, осуществляющей преобразование электрической энергии в механическую посредством вращающегося магнитного поля (описание конструкции и принципа действия АД см. "лабораторно-практическое занятие № 3").
Обмотки статора АД соединяют между собой в "звезду" (  ) или "треугольник"( ) и подключают к трехфазной сети. В рабочем зазоре двигателя образуется магнитное поле, вращающееся вокруг оси статора с постоянной частотой вращения n1, величина которой определяется частотой сети f и числом пар полюсов вращающегося магнитного поля p
) или "треугольник"( ) и подключают к трехфазной сети. В рабочем зазоре двигателя образуется магнитное поле, вращающееся вокруг оси статора с постоянной частотой вращения n1, величина которой определяется частотой сети f и числом пар полюсов вращающегося магнитного поля p
n = |
60 f |
. |
(4.1) |
|
|||
1 |
p |
|
|
|
|
||
При вращении магнитного поля статора с частотой вращения n1 в проводниках обмотки ротора будет индуктироваться ЭДС Е2, под действием которой в короткозамкнутых проводниках обмотки ротора возникает ток I2 .
Вращающееся магнитное поле взаимодействует с током I2 в
обмотке ротора, на проводники которой действует сила, определяемая по закону Ампера. В результате на валу асинхронного двигателя возникает электромагнитный вращающий момент, и ротор начинает вращаться с отличной от n1 частотой вращения n2 в направлении вращения магнитного поля статора. Частота вращения
ротора n2 асинхронной машины отличается от частоты вращения основного магнитного поля статора n1 (в двигательном режиме всегда меньше), поэтому двигатель называется асинхронным.
Отставание ротора от магнитного поля статора оценивается скольжением s, выраженным в относительных единицах или в процентах
s = |
n1 − n2 |
|
или s = |
n1 − n2 |
×100% . |
(4.2) |
n1 |
|
|||||
|
|
n1 |
|
|||
Величина скольжения |
характеризует механическую |
нагрузку |
||||
АД. В режиме двигателя скольжение изменяется от (0,1¸0,5)% на холостом ходу до 100 % при пуске (ротор неподвижен). При номинальной нагрузке скольжение АД составляет (3 ¸ 7) %.
Асинхронные двигатели, как и все электрические машины, обладают свойством саморегулирования. Оно заключается в том, что при изменении противодействующего момента, создаваемого рабочим механизмом, автоматически изменяется вращающий момент машины и восстанавливается нарушенное равновесие моментов на валу (независимо от причины его нарушения). Установившийся режим с постоянной скоростью возможен только при равенстве моментов на валу - электромагнитного вращающего момента М и противодействующего момента Мпр (суммарного нагрузочного момента и сил трения). Если внезапно увеличится противодействующий момент, то ротор начнет тормозиться. Частота вращения ротора n2 будет падать, а скорость его скольжения
относительно вращающегося поля ns = n1 − n2 - возрастать. При увеличении скорости скольжения неизбежно увеличится ЭДС E2 и активные составляющие тока I2a в проводниках ротора. В свою
очередь, увеличение тока ротора определяет увеличение электромагнитных сил и момента, действующих на ротор. С ростом вращающего момента отрицательное ускорение ротора будет стремиться к нулю и наступит повторно равновесие моментов: скорость ротора установится на новом, более низком уровне.
2.2. Механическая характеристика АД
Для асинхронного двигателя важнейшей характеристикой является зависимость n2 = f (M ) . Она связывает две механические
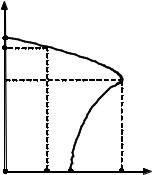
величины, частоту вращения ротора n2 и вращающий момент М
(рис.4.1) и называется механической характеристикой асинхронного двигателя.
n |
Эта |
характеристика |
может быть |
||
n0 |
получена опытным путем или построена по |
||||
nн |
паспортным данным АД. |
|
|||
nкр |
|
||||
В |
паспорте |
АД |
приводятся |
||
|
следующие параметры: тип двигателя, Рн – |
||||
|
номинальная (полезная механическая) |
||||
M |
мощность [Вт], Uн |
– |
номинальное |
||
0 Mн Mп Mmax |
напряжение для различных способов |
||||
включения обмоток статора [В], nн – |
|||||
Рис. 4.1 |
|||||
|
номинальная частота вра- |
|
|||
щения [об/мин] (или номинальное скольжение sн), ηн – номинальный |
|||
КПД, сos |
ϕн – номинальный коэффициент мощности и другие. В |
||
каталогах |
дополнительно указываются |
α = Iп / Iн |
- кратность |
пускового |
тока, β = Мп / Мн - кратность |
пускового |
момента и |
λ = Мmax / Мн - перегрузочная способность.
Зависимость электромагнитного момента М от напряжения U1 , скольжения s, частоты питающей сети f и параметров машины определяется в виде
|
|
|
|
|
|
|
|
2 R2′ |
|
|
|
|
||
|
|
|
|
|
pm1U1 |
|
|
|
|
|
|
|||
|
|
M = |
|
|
s |
|
|
, |
(4.3) |
|||||
|
|
|
|
|
R′ |
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
|
|
|
2πf1 |
R1 + |
|
2 |
|
+ (X1 + |
X 2′ ) |
|
||||
|
|
s |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где р – |
число пар полюсов вращающегося магнитного поля; |
|
||||||||||||
М – |
|
момент на валу АД, Нм; |
|
|
|
|
|
|
|
|
|
|
||
m1 – |
|
число фаз АД; |
|
|
|
|
|
|
|
|
|
|
|
|
f1 – |
частота питающей сети, Гц; |
|
|
|
|
|
|
|
|
|||||
U1 - напряжение сети, В; |
|
|
|
|
|
|
|
|
|
|
||||
s – скольжение; |
|
|
|
|
|
|
|
|
|
|
|
|||
R1, – |
активное сопротивление фазы статора |
|
|
|
|
|||||||||
R2′ – |
активное сопротивление фазы ротора, приведенное к числу |
|||||||||||||
витков неподвижного ротора; |
|
|
|
|
|
|
|
|
|
|
||||
X1, – |
индуктивное сопротивление фазы статора. |
|
|
|
||||||||||

X ′ , – индуктивное сопротивление фазы |
ротора, приведенное к |
2 |
|
числу витков неподвижного ротора. |
|
Из приведенной формулы (4.3) видно, |
что электромагнитный |
момент (М) АД при заданной частоте питающей сети и заданных параметрах АД пропорционален квадрату напряжения U1 .
М = СU |
2 . |
(4.4) |
1 |
|
|
При построении характеристики |
n2 = f (M ) |
по паспортным |
данным, точки кривой определяются аналитически согласно зависимостям (4.5) – (4.7) ( скольжение в этом случае задается в относительных единицах, и используется как промежуточная переменная):
|
n2 = n1(1 − s) ; |
(4.5) |
|||||||
|
M = |
2M max |
; |
|
(4.6) |
||||
|
|
|
|||||||
|
|
s |
+ |
sкр |
|
|
|
|
|
|
|
sкр |
s |
|
|
||||
|
|
|
|
|
|||||
|
sкр = sн(λ + |
|
λ2 − 1) , |
(4.7) |
|||||
где sкр – |
критическое скольжение, соответствующее Мmax; |
|
|||||||
sн – |
номинальное скольжение. |
|
|
|
|
|
|
|
|
Номинальный момент двигателя определяется из выражения номинальной мощности:
P2н = Ω2нM н = 2πn2н M н = πn2 M н . 60 30
Формула (4.6), полученная из зависимости приближенной и дает хорошее совпадение характеристикой в зоне устойчивой работы двигателя.
2.3. Рабочие характеристики АД
(4.8)
(4.3), является
среальной
Рабочие характеристики (рис. 4.2) показывают зависимость эксплуатационных параметров машины от мощности на валу двигателя Р2; к этим параметрам относят ток I1, активную мощность Р1, КПД η, частоту вращения ротора n2 и коэффициент мощности
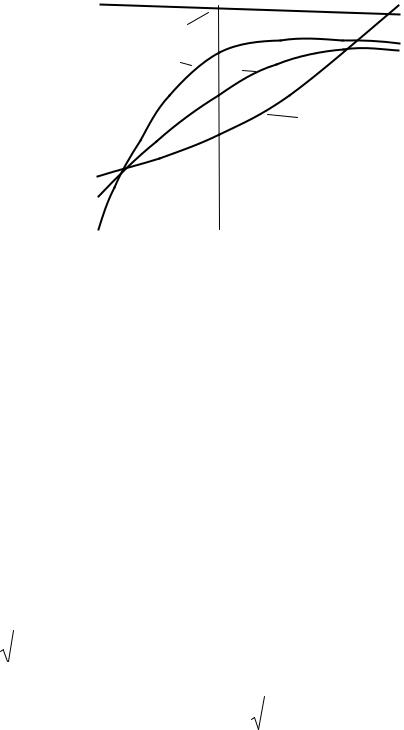
двигателя cos φ. По осям координат отложены относительные значения тока статора I1, частоты вращения ротора n2 и мощности Р2 выраженные в долях от номинальных величин – тока статора I1н, частоты вращения магнитного поля n1 и номинальной мощности Р2н.
Некоторые рабочие характеристики асинхронного двигателя изображены на рис. 4.2.
1 |
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
η |
cosφ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
Р2/Р2н |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0,2 |
0,4 |
0,6 |
0,8 |
1 |
||||
|
|
|
|
|
Рис. 4.2 |
|
|
|
|
|
В режиме холостого хода, когда M ≈ 0, |
I1 = I10 . Значение тока |
|||||||||
I10 зависит от магнитного сопротивления магнитопровода и в первую
очередь от сопротивления воздушного зазора между статором и ротором. Поэтому зазор делают небольшим - порядка десятых долей миллиметра. Тем не менее ток I10 = (0,2 − 0,5)Iн в зависимости от
мощности двигателя, что на порядок больше по сравнению с относительным значением тока I10 у трансформаторов. Ток I10 имеет
активную составляющую, связанную с потерями в магнитопроводе и в обмотке статора.
По мере роста нагрузки на валу увеличивается ток статора, в
основном его |
активная |
составляющая. |
Коэффициент |
мощности |
|||||||||
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
cos φ1 = |
|
|
1 |
|
|
при |
холостом ходе |
определяется |
мощностью |
||||
|
|
|
|
|
|||||||||
P2 |
|
|
|||||||||||
|
|
+ Q2 |
|
|
|
|
|
|
|
||||
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
потерь в магнитопроводе: cos φ10 ≈ |
|
Pмаг |
|
. |
|
||||||||
|
|
|
|
|
|||||||||
P2 |
+ Q2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
маг |
раб |
|
|
|
Обычно cos φ10 имеет значение 0,2 – 0,3, что указывает на нежелательность длительной работы двигателя без нагрузки. При увеличении нагрузки возрастают активные составляющие токов I1a и cos φ1. Но при нагрузках, близких к номинальной, рост cos φ1 замедляется из-за увеличения реактивной мощности полей рассеяния. При номинальной нагрузке cos φ1 = 0,7 − 0,85 .
2.4. Потери мощности и КПД Коэффициент полезного действия
η = |
Р2 |
= |
Р2 |
|
|
(4.9) |
|
Р2 + Рмаг + |
Рэл + |
|
|||
|
Р1 |
|
Рмех |
|||
при отсутствии нагрузки равен нулю, так как в режиме холостого хода сохраняются потери Рмаг. По мере увеличения мощности Р2 КПД повышается. При больших нагрузках рост η замедляется, затем КПД начинает уменьшаться, так как потери в обмотках пропорциональны квадрату токов, а зависимость токов от мощности Р2 близка к линейной.
Большинство двигателей имеют среднегодовую нагрузку ниже номинальной, так как они работают с переменным моментом на валу. Поэтому двигатели рассчитывают так, чтобы максимум КПД находился в пределах (0,7—0,8) Р2ном.
2.4. Пуск двигателя
При "прямом" пуске асинхронного двигателя с короткозамкнутым ротором, когда статорные обмотки подсоединяются с помощью выключателя непосредственно к трехфазной сети, пусковой ток достигает Iп = (4 ÷ 7)Iн . Большой пусковой ток АД оказывает неблагоприятное воздействие на работу других потребителей электрической энергии сети. Существенное снижение пускового тока достигается при включении обмоток статора АД на пониженное напряжение. Например, при пуске обмотки соединяют между собой в "звезду", а после разгона ротора двигателя до частоты вращения, близкой к номинальной, - в "треугольник", то есть на номинальное напряжение обмоток.