

Met_oau
.pdf3. Определить влияние на интегрирующее звено с передаточной
функцией |
W ( p) = |
1 |
инерционной |
W ( p) = |
1 |
|
и изодромной |
|||
|
|
|||||||||
|
|
о |
|
p |
|
ос |
p +1 |
|
||
|
|
p |
|
|
|
|
|
|||
Wос ( p) = |
|
отрицательных обратных связей. Cначала надо опре- |
||||||||
|
p +1 |
|||||||||
|
|
|
|
|
|
|
|
|
||
делить передаточные функции звеньев охваченных обратными связями и выяснить: как изменяется структура звена, как изменяются коэффициент и постоянная времени звена, какая обратная связь уменьшает их постоянную времени, то есть увеличивает быстродействие. Затем необходимо смоделировать исходное звено и системы с отрицательной ОС с помощью схемы на рис. 3.3, и определить статический коэффициент передачи и показатели качества переходного процесса звена без обратной связи и с обратной связью. Из этих обратных связей выбрать ту, которая в начале переходного процесса превращает интегрирующее звено в статическое, форсируя процесс, а в конце обеспечивает астатизм первого порядка. Провести моделирование, построить переходные функции и проверить справедливость теоретических выводов.
4. Для звена с большим коэффициентом передачи kо >100 найти
такую обратную связь, чтобы звено с обратной связью стало инерци- онно-дифференцирующим звеном. С помощью схемы на рис. 3.3 провести моделирование этого звена и построить переходную функцию звена с обратной связью.
Задание 3. Анализ влияния скоростной корректирующей обратной связи на динамические характеристики САУ углом крена ЛА.
1.Составить схему набора модели САУ углом крена ЛА рис. 3.5
впакете Simulink системы Matlab.
2.Построить переходные процессы САУ при включенной и выключенной скоростной обратной связи.
3.Определить показатели качества переходных процессов.
3.6.Требования к отчету
Отчет по работе должен содержать:
51
1.Цель работы;
2.Структурные схемы;
3.Результаты расчетов;
4.Результаты моделирования;
5.Выводы.
По заданию 1 в отчёте приводятся классификация корректирующих звеньев, применяемых в САУ и основные теоретические положения о влиянии корректирующих звеньев на статические и динамические свойства системы.
По заданию 2 в отчете приводятся результаты аналитического расчета передаточных функций и графики переходных процессов систем с корректирующей обратной связью, с объяснением ее влияния на статические и динамические свойства.
По заданию 3 в отчёте приводятся полученные графики и показатели качества переходных процессов в САУ углом крена ЛА, выводы о влиянии корректирующей обратной связи на свойства системы.
3.7. Контрольные вопросы
1.С какой целью применяются корректирующие устройства в
САУ?
2.Как включаются корректирующие устройства в схему САУ?
3.Какие законы регулирования применяются в автоматических системах?
4.Как определить передаточную функцию замкнутой одноконтурной системы?
5.Какими показателями качества характеризуется переходная функция?
6.Как изменяются статические и динамические свойства инерционного звена при охвате его жесткой и гибкой обратной связью?
7.Какая обратная связь превращает интегрирующее звено в инерционное?
8.С какой целью применяется изодромная обратная связь в
САУ?
9.Какой эффект можно получить, охватив обратной связью звено с большим коэффициентом усиления?
52
СПИСОК ЛИТЕРАТУРЫ
1.Бесекерский, В. А. Теория систем автоматического управления. Изд. 4-е / В. А. Бесекерский, Е. П. Попов. – СПб.: Профессия, 2004. – 752 с.
2.Теория автоматического управления: учебник для студентов вузов. Изд. 2-е. Часть 1. Теория линейных систем автоматического управления / под ред. А. А. Воронова. – М.: Высшая школа, 1986. – 367 с.
3.Теория автоматического управления. Учебник для вузов. Изд. 2-е. / под ред. А. В. Нетушила. – М.: Высшая школа, 1976. – 400 с.
4.Юревич, Е. И. Теория автоматического управления. Учебник для студентов втузов. Изд. 2-е / Е. И. Юревич. – Л.: Энергия, 1975 – 416 с.
5.Ерофеев, А. А. Теория автоматического управления: Учебник для вузов / А. А. Ерофеев. – СПб.: Политехника, 2003. – 302 с.
6.Андриевский, Б. Р. Избранные главы ТАУ с примерами на языке MATLAB / Б. Р. Андриевский, А. Л. Фрадков. – СПб.: Наука, 1999. – 467 с.
7.Лазарев, Ю. Ф. Моделирование процессов и систем в MATLAB. Учебный курс / Ю. Ф. Лазарев. – СПб.: Питер; Киев: Издатель-
ская группа BHV, 2005. – 512 с.
8.Петунин, В. И. Интерфейс системы MATLAB / Методические указания к лабораторной работе по дисциплинам «Основы автоматического управления» и «Цифровая обработка сигналов» / В. И. Петунин. – Уфа: Уфимск. гос. авиац. техн. ун-т, 2006. – 29 с.
53
Приложение 1
Программа моделирования типовых звеньев в пакете Control
W1=tf([1],[1]) |
W6=tf([2 1],[1 1]) |
Transfer function: |
Transfer function: |
1 |
2 s + 1 |
|
------- |
W2=tf([1],[1 0]) |
s + 1 |
Transfer function: |
W7=tf([1],[1 1 1]) |
1 |
|
- |
Transfer function: |
s |
1 |
|
----------- |
W3=tf([1],[1 1]) |
s^2 + s + 1 |
Transfer function: |
W8=tf([1],[1 0 1]) |
1 |
|
----- |
Transfer function: |
s + 1 |
1 |
|
------- |
W4=tf([1 0],[0.01 1]) |
s^2 + 1 |
Transfer function: |
W9=tf([1],[1 2 1]) |
s |
|
---------- |
Transfer function: |
0.01 s + 1 |
1 |
|
------------- |
W5=tf([1 1],[2 1]) |
s^2 + 2 s + 1 |
Transfer function: |
ltiview |
s + 1 |
|
------- |
|
2 s + 1 |
|
54
Приложение 2
Программа моделирования САУ углом крена ЛА в пакете Control
W1=tf([1],[1]) |
WOS=W1 |
Transfer function: |
Transfer function: |
1 |
1 |
W2=tf([1],[1]) |
WR=W1*W2*W3*W4 |
Transfer function: |
Transfer function: |
1 |
1 |
|
--------------- |
W3=tf([1],[1 1]) |
s^3 + 2 s^2 + s |
Transfer function: |
WZ=feedback(WP,WOS) |
1 |
|
----- |
Transfer function: |
s + 1 |
1 |
|
------------------- |
W4=tf([1],[1 1 0]) |
s^3 + 2 s^2 + s + 1 |
Transfer function: |
ltiview |
1 |
|
------- |
|
s^2 + s |
|
WP=W2*W3*W4 |
|
Transfer function: |
|
1 |
|
--------------- |
|
s^3 + 2 s^2 + s |
|
55
Приложение 3
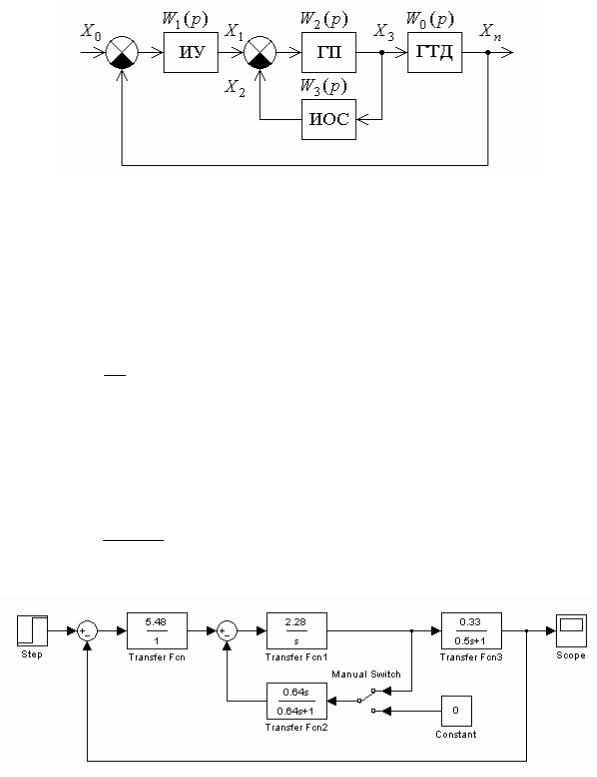
САУ частотой вращения ротора ГТД с астатическим гидроприводом и изодромной обратной связью
Рис. П3.1. Структурная схема САУ частотой вращения ротора ГТД
Передаточные функции звеньев САУ имеют вид: измерительное устройство (ИУ)
W1( p) = k1 ;
гидропривод (ГП)
W2 ( p) = kp2 ;
изодромная обратная связь (ИОС)
W ( p) = |
T3 p |
|
; |
|
|
||||
3 |
T3 p +1 |
|
||
|
|
|||
газотурбинный двигатель (ГТД)
W0 ( p) = T0 kp0+1.
Рис. П3.2. Схема моделирования САУ частотой вращения ротора ГТД
56