

Met_oau
.pdfЕсли при изменении ω от −∞ до +∞ в плоскости корней p
двигаться по мнимой оси и штриховать ее слева, то такому движению в плоскости α соответствует движение по границе D-разбиения, ко-
торую также штрихуют слева по обходу при изменении ω от −∞ до
+∞.
Для определения области D(m) , и в частности области устойчивости D(0) , достаточно знать распределение корней, т.е. число пра-
вых и левых корней при каком-либо одном произвольном значении параметра α = α0 . Переходя в плоскости α от этого параметра к лю-
бому другому, по числу пересечений границы D-разбиения, направлению и числу штриховок можно определить D(m) в любой другой
точке.
Претендентом на область устойчивости является область, внутрь которой направлена штриховка. Чтобы установить, является ли эта область действительно областью устойчивости, необходимо задаться каким-либо значением α0 , лежащим в этой области. Подставив α0 в
характеристическое уравнение, нужно, используя любой критерий устойчивости, установить, все ли корни характеристического уравнения будут при этом левыми. Если при этом не все корни будут левыми, то области устойчивости нет, т.е. изменением только параметра α нельзя сделать систему устойчивой.
Так как изменяемый параметр является вещественным числом, то из полученной области выделяют только отрезок устойчивости, т.е. отрезок вещественной оси, лежащий в области устойчивости, например отрезок АБ.
2.3. Задание
1.Изучить основные определения, необходимые и достаточные условия, критерии устойчивости линейных систем.
2.По заданной структурной схеме определить передаточную функцию замкнутой системы. Определить область устойчивости методом D-разбиения.
3.Провести моделирование заданной линейной системы. Используя алгебраические и частотные критерии устойчивости, определить устойчивость и запасы устойчивости.
31
2.4. Описание лабораторной установки
Лабораторной установкой является ЦВМ IBM PC для проведения цифрового моделирования.
Цифровое моделирование переходных процессов и частотных характеристик линейных систем автоматического управления производится с использованием пакетов Control и Simulink системы Matlab [6-8].
В этой работе исследуется влияние параметров системы автоматического управления на устойчивость и на показатели качества переходного процесса.
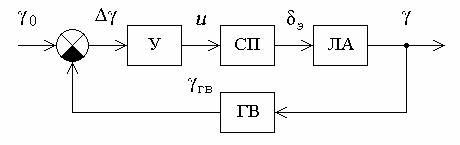
Для исследования предлагается система автоматического управления летательного аппарата (ЛА) по углу крена γ, функциональная
схема которой приведена на рис. 2.7. Она состоит из измерительного устройства – гировертикали (ГВ), которая выдает сигнал γгв, пропор-
циональный углу кренаγ. При появлении отклонения от заданного угла крена γ0 : ∆γ = γ0 −γгв усилитель (У) подает сигнал u на вход
сервопривода (СП) элеронов. Сервопривод поворачивает элероны летательного аппарата (ЛА) на угол δэ так, чтобы скомпенсировать от-
клонение угла крена γ от заданного угла крена γ0 . При задании команды на изменение угла крена γ0 , система управления изменит значение угла крена ЛА так, чтобы отклонение ∆γ = γ0 −γгв стремилось к нулю.
Рис. 2.7. Функциональная схема САУ углом крена ЛА
Звенья системы управления описываются следующими уравнениями:
1. Измерительное устройство – гировертикаль |
|
γгв = k1γ; |
(2.11) |
32

2. Усилитель
u = k2∆γ, ∆γ = γ0 −γгв;
3.Сервопривод
T1 ddδtэ +δэ = k3u ;
4.Летательный аппарат
T |
d 2γ |
+ |
dγ |
= k |
|
δ |
|
. |
|
dt |
|
|
|||||
2 dt2 |
|
|
4 |
|
э |
|
||
Параметры звеньев системы приведены в таблице.
(2.12)
(2.13)
(2.14)
Вари- |
k1 |
k3 |
k4 |
T1 |
T2 |
ант |
|||||
1 |
1 |
4 |
5 |
0,1 |
1 |
2 |
1 |
2 |
4 |
0,2 |
1,2 |
3 |
1 |
1 |
3 |
0,3 |
1,4 |
4 |
1 |
0,5 |
2 |
0,4 |
1,6 |
5 |
1 |
0,25 |
1 |
0,5 |
1,8 |
В таблице даны значения всех параметров звеньев, кроме коэффициента передачи вычислителя k2 . Надо выбрать коэффициент пе-
редачи вычислителя k2 из условия устойчивости замкнутой системы.
Пример программы моделирования данной системы в пакете Control системы Matlab для случая единичных параметров звеньев приведен в приложении 2.
Схема моделирования системы с использованием пакета Simulink системы Matlab для случая единичных параметров звеньев приведена на рис. 2.8.
Рис. 2.8. Схема моделирования САУ углом крена ЛА
33
Параметры летательного аппарата задаются с помощью блока Transfer Fcn2, параметры сервопривода – с помощью блока Transfer Fcn1, параметры усилителя – с помощью блока Transfer Fcn, параметры гировертикали – с помощью блока Transfer Fcn3.
Входным сигналом САУ является единичное ступенчатое изменение γ0 – блок Step. На выходе схемы с помощью блока Scope наблюдается переходной процесс по выходной координате системы γ.
2.5. Порядок выполнения работы
Задание 1. Изучение основных положений теории устойчивости линейных САУ
1.Изучить основные определения, необходимые и достаточные условия устойчивости.
2.Изучить критерии устойчивости линейных систем.
3.Изучить метод D-разбиения по одному параметру системы.
Задание 2. Анализ устойчивости САУ углом крена ЛА
1.По дифференциальным уравнениям определить передаточные функции звеньев и передаточную функцию замкнутой системы.
2.Определить характеристическое уравнение замкнутой систе-
мы.
3.Построить границу D – разбиения в зависимости от коэффициента усиления k2 .
4.Выбрав значение k2 из внутренней области D – разбиения, проверить устойчивость замкнутой системы по критерию Гурвица.
Задание 3. Моделирование САУ углом крена ЛА
1.Составить программу моделирования САУ в пакете Control системы Matlab
2.Составить схему моделирования САУ в пакете SimuLink сис-
темы Matlab.
3.Определить устойчивость системы по критериям Михайлова, Найквиста, построить логарифмические частотные характеристики
34
разомкнутой системы и определить запасы устойчивости по амплитуде и по фазе.
4. Построить переходную функцию и определить показатели качества переходной функции при различных значениях коэффициента k2 .
2.6. Требования к отчету
Отчет по работе должен содержать:
1.Цель работы;
2.Структурные схемы;
3.Результаты расчетов;
4.Результаты моделирования;
5.Выводы.
По заданию 1 в отчёте приводятся функциональная и структурная схемы САУ, основные положения теории устойчивости систем.
По заданию 2 в отчете приводятся результаты вывода передаточных функций, характеристическое уравнение системы и расчет коэффициента k2 с помощью метода D – разбиения.
По заданию 3 в отчёте приводятся полученные графики частотных и временных характеристик системы, их анализ.
2.7. Контрольные вопросы
1.Как определяется передаточная функция замкнутой системы?
2.Дайте определение устойчивости системы автоматического управления.
3.Как определить характеристическое уравнение системы?
4.Как влияет расположение корней характеристического уравнения на устойчивость системы?
5.Как определить устойчивость системы по критерию Гурвица?
6.Как определить устойчивость линейных систем по частотным критериям?
7.Как определить запасы устойчивости по амплитуде и по фазе?
8.Как построить области устойчивости в плоскости одного параметра?
9.Как производят разметку областей устойчивости?
35
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ МЕТОДОВ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
3.1. Цель работы
Целью настоящей работы является изучение влияния корректирующих обратных связей на точность, быстродействие и показатели качества переходных процессов систем автоматического управления.
3.2. Теоретическая часть
3.2.1. Назначение и виды коррекции динамических свойств САУ
Коррекция динамических свойств САУ используется для выполнения требований по устойчивости, точности и качеству переходных процессов [1-5].
С точки зрения требований к точности САУ в установившихся режимах коррекция динамических свойств САУ может понадобиться для увеличения коэффициента передачи или порядка астатизма при сохранении устойчивости и определенного качества переходных процессов.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой САУ, расширения области устойчивости, повышения качественных показателей переходных процессов.
Осуществляется коррекция с помощью введения в систему корректирующих устройств с определенной, заранее подобранной передаточной функцией. Корректирующие устройства могут включаться последовательно (рис. 3.1, а) или параллельно: согласно параллельно (рис. 3.1, б) и встречно параллельно (рис. 3.1, в) с основными звеньями САУ. Последний тип коррекции называется также коррекцией с помощью корректирующих обратных связей.
Последовательное корректирующее устройство Wк1( p) включа-
ют непосредственно после датчика рассогласования или же после предварительного усилителя (рис. 3.1, а). Это связано с тем, что уровень сигнала рассогласования обычно весьма мал и корректирующее устройство снижает чаще всего уровень сигнала. Применение после-
36

довательных корректирующих устройств наиболее удобно в системах, у которых сигнал управления представляет собой напряжение постоянного тока.
Применяют и второй вариант включения корректирующего устройства Wк2 ( p) в систему – параллельно одному из участков ее пря-
мой цепи (рис. 3.1, б). Такое параллельное корректирующее устройство оказывается весьма удобным – при меньшей сложности обеспечивает нужное преобразование сигнала управления.
Другое, широко распространенное включение корректирующего устройства показано на рис. 3.1, в. В данном случае корректирующее устройство Wк3( p) является обратной связью, чаще всего отрица-
тельной, которая охватывает один из элементов прямой цепи системы. Этим элементом обычно является исполнительный элемент или выходной каскад усилителя.
Рис. 3.1. Схемы включения корректирующих устройств в САУ
37
В линейных системах для корректирующего устройства одного типа всегда можно подобрать эквивалентное устройство другого типа. Переход от одного типа устройства к эквивалентному другому типу производится при помощи формул перехода, которые получаются приравниванием передаточных функций разомкнутых цепей.
По каждой из структурных схем (рис. 3.1) составим выражение передаточной функции разомкнутой цепи и приравняем эти выражения друг другу. Получаем
W ( p)W |
( p) =W ( p) |
1 |
+Wк2 ( p) |
= |
|
W ( p) |
|
, |
(3.1) |
||
1+W ( p)W |
( p) |
||||||||||
к1 |
|
|
W ( p) |
|
|
|
|
||||
|
|
|
3 |
|
|
|
2 к3 |
|
|
|
|
где W ( p) =W1( p)W2 ( p)W3 ( p) .
Из (3.1) определяют формулы перехода от одного вида корректирующего устройства к другому:
W |
( p) =1+Wк2 ( p) = |
|
|
|
1 |
|
|
; |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
к1 |
|
|
W 3( p) |
1 |
+W2 ( p)Wк3 ( p) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||||
W |
( p) =W |
( p)[W |
( p) −1] = − |
W2 ( p)W3 ( p)Wк3 ( p) |
; |
|||||||||||
|
|
|||||||||||||||
к2 |
|
3 |
к1 |
|
|
|
|
|
|
1+W2 ( p)Wк3 ( p) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Wк3 |
( p) = |
1 |
−Wк1( p) |
|
= − |
|
|
Wк2 |
( p) |
|
. |
|||||
W2 |
( p)Wк1( p) |
W2 |
( p)[W3 ( p) +Wк2 ( p)] |
|||||||||||||
|
|
|
|
|
||||||||||||
При отрицательном значении передаточной функции Wк2 ( p)
выходной сигнал этого устройства должен вычитаться из выходного сигнала участка W3 ( p) . Если значение передаточной функции Wк3( p)
оказывается отрицательным, то это устройство должно включаться в виде положительной обратной связи.
В настоящее время корректирующие устройства являются основным способом повышения качества линейных непрерывных систем управления по отклонению.
3.2.2. Последовательные корректирующие звенья в САУ
Корректирующие звенья последовательного типа применяются в САУ с электрическим сигналом в виде напряжения постоянного тока u , который функционально связан с ошибкой ε = x − y системы, т.е.
u = f (ε), например u = k ε. Этот сигнал подается на вход таких корректирующих звеньев.
38
Корректирующие звенья в большинстве случаев представляют собой типовые динамические звенья, основное назначение которых изменять свойства САУ в нужном направлении, и реализуются на пассивных или активных RLC-элементах.
Широкое применение получили следующие последовательные корректирующие звенья [4]: пропорционально-дифференцирующее (ПД), пропорционально-интегрирующее (ПИ), пропорционально- интегро-дифференцирующее (ПИД).
Пропорционально-дифференцирующее звено. Идеальное ПД-
звено имеет следующую передаточную функцию
Wпд( p) = kп ±kд p = kп(1±Tд p) , |
(3.2) |
где Tд = kд / kп.
Выходная величина звена содержит две составляющие: пропорциональную входной величине и пропорциональную ее первой производной. Введение воздействия по производной изменяет значение коэффициента при p в первой степени в характеристическом поли-
номе D( p) замкнутой САУ. Это изменяет условия устойчивости и
качество переходных процессов в САУ. Например, применение ПДзвеньев позволяет сделать структурно неустойчивые САУ структурно устойчивыми, т.е. обеспечивает устойчивость САУ с астатизмом выше первого порядка. Также можно сделать устойчивой САУ, структурно неустойчивую из-за наличия в ней неустойчивых звеньев.
ПД-звено является фильтром верхних частот, так как ЛАХ растет с увеличением частоты, расширяет полосу пропускания САУ, т.е. повышает ее быстродействие. ФЧХ ПД-звена положительна, звено уменьшает суммарное запаздывание по фазе в САУ.
Положительное ПД-воздействие (kд > 0 ) форсирует течение переходного процесса, отрицательное ПД-воздействие (kд < 0 ) – замед-
ляет течение переходного процесса.
Реальное ПД-звено обычно обладает инерционностью, его передаточная функция
W ( p) = |
kп ±kд p |
= k |
|
1±Tд p |
, |
|
T p +1 |
п 1±T p |
|||||
пд |
|
|
||||
|
пд |
|
|
пд |
|
|
где Tд = kд / kп, Tпд <<Tд, kп = kд / Tд.
Пропорционально-интегрирующее звено.
звено имеет передаточную функцию
(3.3)
Идеальное ПИ-
39

Wпи( p) = kpи ±kп = kpи (1±Tи p);
реальное ПИ-звено –
W ( p) = |
1 |
|
kи +kп p |
= |
kи |
|
1±Tи p |
, |
|
|
|
|
|||||
пи |
p Tпи p +1 p 1+Tпи p |
|
||||||
|
|
|||||||
где Tи = kп / kи.
(3.4)
(3.5)
Таким образом, ПИ-звено эквивалентно последовательному соединению интегрирующего звена и ПД-звена.
Частотные свойства ПИ-звена, как фильтра нижних частот, обратны таковым у ПД-звена.
ПИ-звено обычно применяют для повышения порядка астатизма при сохранении устойчивости и необходимого качества переходных процессов. При этом знак для воздействия по интегралу должен быть положительным; знак воздействия по производной может быть любым.
Пропорционально-интегро-дифференцирующее звено. Иде-
альное ПИД-звено имеет передаточную функцию
W |
( p) = |
kи |
±k |
п |
±k |
д |
p = |
kи |
(1±T p ±T T p2 ) ; |
(3.6) |
|||
|
|
||||||||||||
пид |
|
p |
|
|
p |
и |
и д |
|
|||||
|
|
|
|
|
|
|
|
|
|||||
реальное ПИД-звено – |
|
|
|
|
|
|
|
||||||
W |
( p) = kи |
1±Tи p ±TиTд p2 |
, |
|
(3.7) |
||||||||
|
|
||||||||||||
пид |
|
p |
|
Tпид p +1 |
|
|
|
||||||
|
|
|
|
|
|
||||||||
где Tи = kп / kи; Tд = kд / kп.
ПИД-звено эквивалентно последовательному соединению либо интегрирующего звена и ПД-звена с воздействием по двум производным, либо ПИ-звена и ПД-звена с одной производной.
Частотные характеристики этого звена получаются сложением характеристик ПИ и ПД звеньев. Соответственно такое звено подчеркивает как нижние, так и верхние частоты, подавляя средние.
ПИД-звено повышает порядок астатизма (как и ПИ-звено) и дает более сильную коррекцию динамических свойств САУ.
Часто интегро-дифференцирующими звеньями называют не только звенья с передаточной функцией (3.7), но и другие звенья, АЧХ которых имеет минимум на средних частотах и растет в сторону как низких, так и высоких частот. Такую характеристику имеет, например, звено с передаточной функцией
40