

ТАУ-2_УТС СУХТП
.pdf1 Динамические характеристики линейных систем.
Для оценки динамических свойств объекта, регулятора и других звеньев АСР широко применяются различные динамические характеристики.
Динамическая характеристика – это реакция звена на некоторое стандартное или, так называемое, типовое входное воздействие. По экспериментально полученным динамическим характеристикам можно, как правило, определить передаточную функцию.
В ТАУ широко применяются два вида динамических характеристик: временные и частотные.
1.1 Временные характеристики.
Из временных наиболее часто используются импульсная и переходная характеристики
1.1.1 Переходная характеристика
Переходной характеристикой h(t) называется реакция звена (или системы) на единичное скачкообразное воздействие при нулевых начальных условиях.
x(t) |
1 |
t |
h(t) |
hуст=K t
Рис.7.1.Примеры переходных характеристик
Напомним, что при нулевых начальных условиях в момент подачи входного сигнала звено находится в статическом режиме (входные и выходные сигнала не изменяются во времени) Установившееся значение h(t) равно коэффициенту усиления звена
h(t)уст =W (0) = K . |
(7.1) |
Действительно из уравнения статики при x =1 получаем y=Kx=K.
На рис. 7.1 приведены примеры переходных характеристик устойчивых звеньев и единичное скачкообразное воздействие x(t) =1(t) .
Переходная характеристика может быть вычислена по передаточной функции, например, решением соответствующего дифференциального уравнения.
Существуют методы, позволяющие по экспериментально полученной переходной кривой определить передаточную функцию. Что широко применяется на практике.
1.2 Частотные характеристики
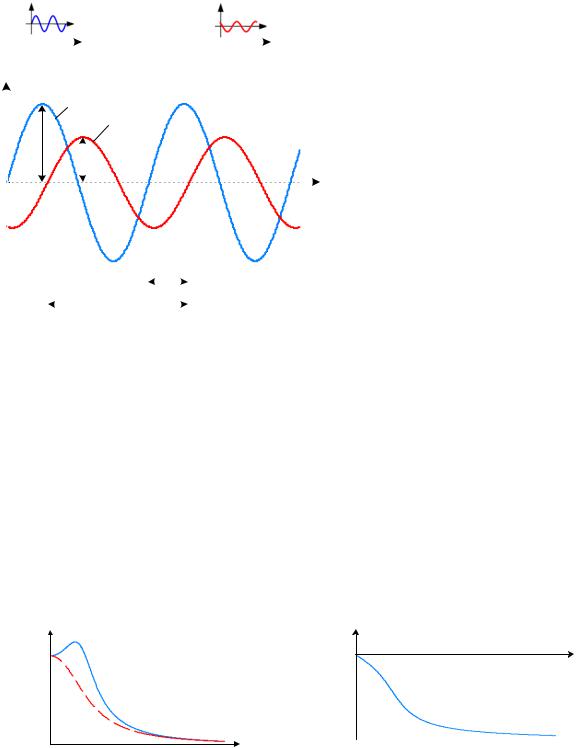
Подадим на вход линейного устойчивого звена гармонический сигнал
x = Aвхsinωt . |
(7.2) |
После окончания переходного процесса на выходе получим установившийся гармонический сигнал той же частоты, но другой амплитуды и сдвинутый по фазе на угол ϕ по сравнению с
входным
|
|
y = Aвыхsin(ωt +ϕ). |
(7.3) |
|
x |
|
y |
|
|
устойчивый |
|
|||
|
|
|
|
|
|
|
объект |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
|
|
|
T = |
2π |
|
|
ω |
|
|
|
|
ω |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Рис.7.2.К экспериментальному определению частотных характеристик
Если изменять частоту входного сигнала, оставляя амплитуду постоянной, то будет изменяться амплитуда выходного сигнала и сдвиг по фазе между входными и выходными колебаниями.
Зависимость отношения амплитуды выходного сигнала к амплитуде входного от частоты называется амплитудно-частотной характеристикой АЧХ
A(ω) = |
Aвых |
|
|
(7.4) |
|
A |
|||||
|
|
|
|
||
|
вх |
|
|
|
Зависимость сдвига фаз между выходными и входными колебаниями называется фазочастотной характеристикой ФЧХ
ϕ(ω) =ϕвых −ϕвх |
. |
(7.5) |
|
|
|
Примеры графиков АЧХ и ФЧХ приведены ниже
A(? ) |
?(? ) |
? |
|
?
Рис.7.3. Примеры частотных характеристик
Для большинства физически реализуемых звеньев АЧХ с ростом частоты убывает, а фазовый сдвиг отрицателен (отставание по фазе).
Значение A(ω) характеризует усиление по амплитуде гармонического сигнала частоты ω. Важную роль играет амплитудно-фазовая характеристика (АФХ) определяемая формулой
W ( jω) = A(ω)e jϕ(ω) |
(7.6) |
Формально W(jω) – комплексный вектор, длина (модуль) которого равен A(ω), а угол c вещественной осью равен φ(ω). Формула (7.6) является показательной формой записи комплексного числа. При изменении частоты ω в пределах 0≤ω≤∞ изменяется длина вектора и угол, а конец вектора описывает кривую, которая собственно и называется амплитудно-фазовой характеристикой – АФХ, рис.7.4.
 Im W(jω)
Im W(jω)
Re W(jω)
φ(ω1)
A(ω1) W(jω1)
Рис. 7.4. К определению амплитуднофазовой характеристики. |
|
Формулу (*) можно записать в другом виде |
|
W ( jω) = A(ω)e jϕ(ω) = ReW ( jω) + j ImW ( jω) , |
(7.7) |
где ReW ( jω) , ImW ( jω) - вещественная и мнимая частотные характеристики – проекции вектора
W(jω) на оси координат. Формулы связи:
A(ω) = W ( jω) =  Re2 +Im2
Re2 +Im2
|
Im |
, Re ≥ 0 |
|
arctg |
Re |
|
|
ϕ(ω) = |
|
(7.8) |
|
Im |
|
||
|
−π, Re |
< 0 |
|
arctg |
Re |
||
|
|
|
ReW ( jω) = A(ω) cosϕ(ω)
ImW ( jω) = A(ω) sin ϕ(ω)
2 Типовые динамические звенья.
Типовыми – называются звенья, с передаточными функциями порядка не выше второго. Многие реальные звенья можно описать как простейшие типовые. Любое более сложное звено (более высокого порядка) можно представить как некоторое соединение типовых.
Все звенья можно разделить на три группы:
1.Статические (пропорциональные, усилительные)
2.Дифференцирующие
3.Интегрирующие
Динамические характеристики каждой группы звеньев характеризуются общими свойствами. Рассмотрим простейшие типовые звенья и их характеристики.
2.1 Статические звенья.
1. Усилительное звено |
|
Это безынерционное звено, описываемое уравнением |
(8.1) |
y = Kx |
К –постоянная – коэффициент усиления или коэффициент передачи.

Передаточная функция легко находится из уравнения (8.1) |
|
W (s) = K . |
(8.2) |
Простейшим примером может служить делитель напряжения или рычаг, рис. 8.1.
R1
|
|
|
|
|
l2 |
|
|
|
|
|
R2 |
l1 |
l2 |
uвх(t) |
R2 |
uвых(t) K = |
R1 |
y |
K = l1 |
|
|
|
|
+ R2 |
x |
|
|
|
|
Рис.8.1. Примеры усилительных звеньев |
|
|||
Переходная характеристика усилительного звена имеет вид |
(8.3) |
|||||
|
|
|
h(t) = K 1(t) |
|
||
и изображена на рис.8.2. Выходной сигнал усиливается в К раз по сравнению со входным. Напомним, что переходная характеристика есть реакция на единичное скачкообразное воздействие при нулевых начальных условиях (см. раздел 7.1.)
 x(t)=1(t) 1
x(t)=1(t) 1
t
 y(t)=h(t)
y(t)=h(t)
K
t
Рис. 8.2. Переходная характеристика усилительного звена
2. Звено чистого или транспортного запаздывания |
|
Звено описывается уравнением |
|
y(t) = x(t −τ) , |
(8.4) |
где τ – запаздывание.
Выходной сигнал повторяет входной со сдвигом во времени (запаздыванием) на время τ.. Передаточная функции звена
W (s) = e−τs . |
(8.5) |
Выражение для передаточной функции имеет не совсем обычный вид, его можно получить, если выражение x(t −τ) разложить в ряд Тейлора относительно t и перейти к операторной форме
записи.
Переходная характеристика изображена на рис. 8.3 и описывается уравнением
|
|
|
|
|
|
|
h(t) =1(t −τ) |
(8.6) |
1 |
|
|
x(t)=1(t) |
|
||||
|
|
|||||||
|
|
|
|
t |
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
h(t)=y(t) |
|
|
||
1 |
|
|
|
|||||
|
|
|
||||||
|
|
|
|
t |
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
τ |
|
|
||
|
Рис. 8.2. Переходная характеристика |
|
||||||
|
|
|
|
|
звена запаздывания |
|
||

Примером может служить транспортер для перемещения сыпучих материалов
Cвязь между входными и выходными потоками описывается уравнением
Qвых(t) = Qвх (t −τ) ,
где τ = vl ., l – длина ленты, v – скорость перемещения.
Другой пример – прокатка стали
Толщина листа может быть измерена только на определенном расстоянии от валов, что приводит к запаздыванию измерения по времени.
Транспортное запаздывание характерно для трубопроводов. Импульс давления, возникший в начале участка трубы, достигает конечной точки через некоторое время, зависящее от скорости звука в среде.
3. Апериодическое звено 1 порядка (инерционное) |
|
|
|
|
|
|
|
||||||
Звено описывается уравнением: |
|
|
|
|
|
|
|
|
|
|
|
|
|
T dy + y = Kx , |
|
|
|
|
|
|
|
|
|
|
|
|
.(8.7) |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
где К – коэффициент усиления звена , |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т – постоянная времени – положительная константа, характеризующая инерционность звена. |
|||||||||||||
Передаточная функция звена находится из (8.7) методом, описанным в разделе 4. |
|
||||||||||||
W (s) = |
K |
|
. |
|
|
|
|
|
|
|
|
|
(8.8) |
Ts +1 |
|
|
|
|
|
|
|||||||
Характеристический полином звена |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
(8.9) |
|
D(s) =Ts +1 |
|
|
|
|
|
|
|
|
|
|
|||
имеет отрицательный действительный корень s = − |
1 |
– звено устойчиво. |
|
||||||||||
|
|
||||||||||||
|
1 |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдем переходную характеристику звена Решение ДУ (8.7) имеет вид (см. раздел 5) |
|
||||||||||||
y(t) = yпер (t) + yуст(t) = Ces1t + yуст(t) = Ce− |
1 |
t + yуст (t) |
(8.10) |
||||||||||
T |
|||||||||||||
Подставив в (8.7) х = 1, найдем yуст (t) = K . Так как начальные условия нулевые, |
y(0) = 0 , из |
||||||||||||
последнего уравнения найдем постоянную интегрирования |
|
C = −K . В результате получим |
|||||||||||
переходную характеристику инерционного звена |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
− |
t |
|
|
− |
t |
|
|
(8.11). |
||
|
|
|
|
|
|||||||||
h(t) = K − Ke T = K 1 |
−e T |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходная характеристика приведена на рис. 8.2

x(t) |
1 |
t |
h(t) |
K |
t |
T |
Рис. 8.2. Переходная характеристика инерционного звена
Переходный процесс является экспоненциальным и завершается за время равное Тзат ≈ (3-4)T. Постоянная времени Т равна длине подкасательной к переходной кривой, рис.8.2, и может быть найдена экспериментально. Чем больше время T, тем дольше длится переходный процесс. Таким образом, постоянная времени характеризует инерционность звена.
Примерами инерционных звеньев являются электрическая RC цепочка, гидравлический объект, рис.8.3, и ряд других реальных звеньев.
|
R |
|
|
|
Qп |
uвх(t) |
C |
uвых(t) |
|
||
|
|
H |
Qс
Рис. 8.3. Примеры инерционных звеньев 1-ого порядка
4.Апериодическое звено 2-го порядка. Колебательное звеное
Дифференциальное уравнение
T22 d 2 2y +T1 dy + y = Kx . dt dt
Передаточная функция
W (s) = |
|
K |
, |
T 2 s2 |
+T s +1 |
||
2 |
1 |
|
|
где |
|
|
|
К – коэффициент усиления,
T1, T2 – постоянные времени, положительные числа. Характеристический полином
D(s) =T22 s2 +T1s +1.
Найдем корни характеристического полинома
(8.12)
(8.13)
(8.14)
|
|
−T ± |
T 2 |
−4T 2 |
|
s |
= |
1 |
1 |
2 |
(8.15) |
|
2T 2 |
|
|||
1,2 |
|
|
|
|
|
|
|
|
2 |
|
|
Звено называется апериодическим, если корни характеристического уравнения
действительные и отрицательные.
Корни будут действительные и отрицательные, если дискриминант уравнения неотрицателен
T12 −4T22 =(T1 −2T2 )(T1 +2T2 )≥ 0 ,.
Так как T1 и T2 положительны, то последнее неравенство будет выполняться, если T1 ≥ 2T2 .
В этом случае D(s) разлагается на два сомножителя с действительным корнями
D(s) =T22 s2 +T1s +1 = (TAs +1)(TB s +1) ;

где |
s = − |
1 |
, s |
|
= − |
1 |
. |
(8.16) |
|
2 |
|
||||||
|
1 |
TA |
|
|
TB |
|
||
|
|
|
|
|
|
|||
Передаточная функция может быть разложена на произведение двух сомножителей. Тогда звено 2-го порядка можно представить в виде последовательного соединения двух апериодических звеньев 1-го порядка, рис. 8.4.
W (s) = |
|
|
K |
|
|
|
|
|
K |
1 |
|
|
||||||
|
|
|
|
|
= |
|
|
|
|
|
|
. |
(8.17) |
|||||
(TAs +1)(TB s +1) |
TAs +1 |
TB s +1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
X |
|
|
K |
|
1 |
|
|
Y |
|
|||||||||
|
|
|
TAs +1 |
|
|
|
|
TB s +1 |
|
|
|
|
|
|
|
|||
Рис. 8.4. Эквивалентная структурная схема апериодического звена 2-го порядка
Примером может служить каскад из двух емкостей, рис. 8.5.
Входным сигналом является приток в первую емкость, выходным – уровень во второй.
Qп
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.5. Пример апериодического звена 2-го порядка |
|
||||||||||||||||||||||||||||||||||
Переходную характеристику можно записать следующим образом |
|
|
|||||||||||||||||||||||||||||||||
y(t) = y (t) + y |
уст |
(t) =C es1 t +C es2 t + y |
уст |
(t) = |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
пер |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
− |
1 |
t |
|
|
|
|
|
|
|
− |
1 |
t |
+ y |
|
|
(t) |
|
|
||||||
|
|
|
|
=C e T1 |
+C e T2 |
уст |
|
|
|||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Установившаяся составляющая, как и в случае инерционного звена, равна yуст (t) = K . Постоянные
интегрирования С1, С2 можно найти подстановкой начальных условий |
y(0) = 0, y(1) (0) = 0 в у(t) и |
||||||||||||||
у(1)(t) решением системы линейных уравнений. В результате получим |
|
||||||||||||||
|
|
|
T |
|
− |
t |
|
|
T |
|
− |
t |
|
|
|
|
|
|
T |
|
|
T |
|
||||||||
h(t) = K 1 |
− |
|
A |
|
e A − |
|
B |
e |
|
B . |
(8.18) |
||||
T |
−T |
T |
−T |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
A |
|
B |
|
|
|
A |
B |
|
|
|
|
|
|
График переходного процесса изображен на рис. 8.6-а. Поскольку начальная скорость равна нулю, y(1) (0) = 0 , то в начальный момент переходная кривая касается оси времени. Переходный процесс
затухает медленнее, чем в инерционном звене – пунктирная кривая на рис. 8.6-а.
Звено называется колебательным, если корни характеристического уравнения комплексносопряженные. Это возможно, если T1 < 2T2 .
Передаточная функция колебательного звена обычно записывается в другой форме
|
W (s) = |
K |
, |
(8.19) |
|
T 2 s2 +2ξTs +1 |
|||
где |
ξ – коэффициент демпфирования, для колебательного звена ξ <1, |
|
||
T – постоянная времени; T2 =T , T1 = 2ξT .
Корни характеристического полинома (комплексно сопряженные)
s |
= |
−2ξT ± 4ξ2T 2 −4T 2 |
= |
−ξ |
± j |
1−ξ |
= −α ± jω |
(8.20) |
|
2T 2 |
T |
T |
|||||||
1,2 |
|
|
|
|
|

Переходная характеристика получается аналогично предыдущему звену. Только комплексносопряженные корни дают гармоническую составляющую переходного процесса
|
|
|
|
|
|
|
−α t |
|
|
|
|
|
|
(8.21) |
||||||
|
|
|
|
|
h(t) = K 1 |
−Ce |
sin (ω t +ϕ) , |
|||||||||||||
|
|
|
|
|
|
2 |
, ϕ = arctg αω . |
|
|
|
|
|||||||||
где |
|
|
|
|
C |
= 1+ αω2 |
|
|
|
|
||||||||||
Графики переходной характеристики для двух значений ξ приведены на рис.8.6-б |
||||||||||||||||||||
|
1 |
|
|
x(t) |
|
|
|
|
|
1 |
|
|
|
x(t) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|||||||
|
|
|
|
t |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) ?2 |
|
|
|
|
|
K |
|
h(t) |
|
|
|
|
|
K |
|
|
?1>?2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
t |
|
|
|
|
?1 |
|
t |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) Колебательное звено |
|
|||
|
|
|
|
а) Апериодическое звено |
|
|
|
|
|
|||||||||||
Рис.8. 6. Переходные характеристики звеньев 2-го порядка
С уменьшением коэффициента демпфирования ξ, колебательность переходного процесса возрастает.
Примеры колебательных звеньев приведены на рис. 8.7.
|
R |
|
пружина |
|
|
масло |
|
|
|
|
|
uвх(t) |
C |
uвых(t) |
|
L |
|
||
|
|
|
|
|
|
|
груз |
а) Электрический колебательный контур |
б) Гидромеханический демпфер |
||
Рис. 8.7. Примеры колебательных звеньев
При ξ=0 в системе возникают незатухающие колебания, рис.8.9., такое звено называется консервативным . Передаточная звена принимает вид
W (s) = |
K |
|
(8.22) |
|
T 2 s2 +1 |
||||
|
|
|||
Корни характеристического полинома чисто мнимые – граница устойчивости.
Примером консервативного звена служит математический маятник при отсутствии трения.  x(t)
x(t)
t
 h(t)
h(t)
K
t
Рис. 8.9. Переходная характеристика консервативного звена

Вернемся к примерам на рис.8.8. В случае, если значение сопротивления R велико, потери энергии на нем увеличиваются (превращаются в тепло) и звено становится апериодическим. Если же R = 0, то потери отсутствуют, имеем идеальное консервативное звено – колебания не затухают. Аналогичная ситуация имеет место и в случае с гидромеханическим демпфером. Если воздействовать на груз с некоторой постоянной силой (например, электромагнитом), то груз преодолев сопротивление пружины и вязкое трение перейдет в новое положение. Если вязкость масла не велика, то переходный процесс будет колебательным, при высокой вязкости масла процесс будет апериодическим. При отсутствии трения получим консервативное звено.
Отметим, что установившееся значение переходной характеристики всех устойчивых статических звеньев равно коэффициенту усиления – hуст = K .
2.2 Дифференцирующие звенья. |
|
|
|
||
1. Идеальное дифференцирующее звено |
|
|
|
|
|
Дифференциальное уравнение |
|
|
|
|
|
y = K dx =T dx , |
|
|
|
(8.23) |
|
dt |
dt |
|
|
|
|
где Т – постоянная времени дифференцирования. |
|
|
|
||
Передаточная функция |
|
|
|
|
(8.24) |
W (s) = Ks =Ts |
|
|
|
||
Звено является идеальным (m>n), |
физически нереализуемым, используется как приближенная |
||||
|
|
модель реального дифференциатора. |
|||
x(t) |
|
Переходная |
характеристика |
пропорциональна |
|
|
производной и представляет собой δ - функцию – |
||||
|
|
||||
1 |
|
импульс |
бесконечно |
малой |
длительности, |
t |
|
бесконечно большой амплитуды и площадью равной |
|||
|
|
|
h(t) = Kδ(t) |
||
h(t) |
|
|
|
||
|
Таким образом при подаче на вход единичного |
||||
K?(t) |
|
скачкообразного воздействия на выходе получаем δ- |
|||
|
функцию (производная от единичной скачкообразной |
||||
|
|
||||
S=K |
|
функции x(t)=1(t) ) - импульс площадью K. |
|||
t |
|
Появление δ-функции можно объяснить следующим |
|||
|
|
образом. Во всех точках кроме t = 0 входной сигнал |
|||
Рис.8.10.Переходная характеристика |
постоянная величина и его производная равна нулю. |
||||
идеального дифференциатора |
|
В точке t = 0 производная x(t) в обычном смысле не |
|||
|
существует. С другой стороны, при t = 0 сигнал x(t) |
||||
|
|
||||
мгновенно ( с бесконечно большой скоростью) изменяется от 0 до 1 – возникает импульс скорости |
|||||
бесконечно большой амплитуды. Интеграл от δ-функции (площадь δ-функции) должен равняться |
|||||
входному сигналу умноженному на К. |
|
|
|
|
|
2. Реальное дифференцирующее звено.
Реальное дифференцирующее звено может быть представлено последовательным соединением звеньев: идеального дифференцирующего и инерционного. Его передаточная функция имеет вид
W (s) = |
Ks |
= Ks |
1 |
|
. |
(8.26) |
||||
Ts +1 |
Ts +1 |
|||||||||
Дифференциальное уравнение |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
T |
dy |
+ y = K |
dx |
|
|
|
|
(8.27) |
||
dt |
dt |
|
|
|
||||||
|
|
|
|
|
|
|
||||
Характеристический полином
D(s) =Ts +1,
корень характеристического полинома s1 = −T1 , звено устойчивое.
Переходная характеристика
|
K |
− |
t |
|
|
|
|
|
|
||||
h(t) = |
|
e T . |
(8.29) |
|||
T |
||||||
|
|
|
|
|
||

График переходной характеристики приведен на рис. 8.11-а.
|
|
x(t) |
|
|
|
|
1 |
|
|
|
|
|
|
t |
C |
|
|
|
|
h(t) |
|
||
|
K |
|
|
||
а) |
б) uвх(t) |
R |
uвых(t) |
||
T |
|||||
|
|
t
T
Рис. 8.11. Переходная характеристика реального дифференцирующего звена – а), пример звена – б)
Типичный пример – дифференцирующая RC цепочка, рис.8.11-б, причем T=RC
При K >T характеристика приближается к идеальному звену, высота импульса равна KT .
Особенностью дифференцирующих звеньев является то, что их переходная характеристика с течением времени стремится к нулю, hуст = 0 .
2.3 Интегрирующие звенья.
1. Идеальное интегрирующее звено
Дифференциальное уравнение звена
|
y = K ∫t |
x(t)dt |
(8.30) |
|
или, после дифференцирования, |
0 |
|
|
|
|
|
|
||
|
dy |
= Kx . |
(8.31) |
|
|
dt |
|||
|
|
|
|
|
здесь К – коэффициент усиления интегрирующего звена.
Выходной сигнал звена пропорционален интегралу от входного – отсюда и название звена.
С другой стороны, скорость изменения выходного сигнала пропорциональна входному сигналу. Передаточная функция звена
W (s) = |
K |
(8.32) |
|
s |
|||
|
|
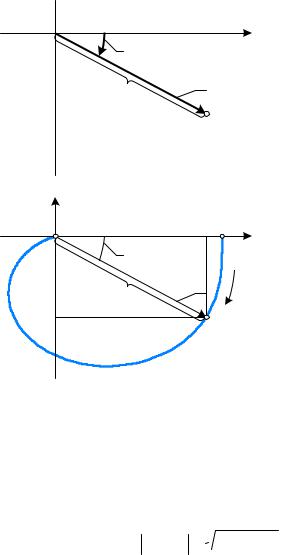
Корень характеристического уравнения s1=0, что соответствует границе устойчивости. Переходная характеристика звена легко находится из (8.30) после подстановки x(t) = 1 h(t) = Kt .
и представляет собой линейно возрастающий сигнал, рис.812-а – движение с постоянной скоростью.
 x(t)
x(t)
1 |
t |
 x(t)
x(t)
t |
а) |
h(t) |
б) |
y(t) |
|
Kt |
|
|
|
arctgK t |
|
t |
Рис. 8.12. Динамические характеристики идеального интегрирующего звена