

Определение параметров буп
Как было уже сказано, БУП для разрабатываемой СНА имеет в своем составе регулятор (корректирующее звено), микроконтроллер, ЦАП и ИТУН. Структурная схема СНА с учетом БУП показана на рисунке 4.
Рисунок
4.
Структурная схема СНА с учетом БУП.
Микроконтроллер, получая требуемую уставку угла и сигнал от ИК формирует значение требуемого угла поворота, подаваемое на ЦАП, получая требуемое значение угла формирует напряжение, подаваемое на вход ИТУН. ИТУН формирует нужный для обеспечения двигателем требуемого момента ток.
Передаточная функция ЦАП определяется его разрешающей способностью. Выберем ЦАП AD 7521 LN. Количество его разрядов равно 10. Минимальное напряжение на выходе – 100 мВ, максимальное – 10В. Тогда коэффициент ЦАП равен:

Передаточная функция ИТУН определяется коэффициентом:

Постоянные времени и коэффициент передачи для корректирующего звена будут найдены при расчету ЖЛАХ.
Синтез жлах
В качестве управляющего сигнала выступает гармоническое воздействие:

Скорость изменения гармонического сигнала:
Амплитудное значение скорости изменения гармонического сигнала:
 =0.5’/c
=0.5’/c

 Гц
Гц
Амплитудное значение максимального отклонения:
В
следящей системе с гармоническим
задающим воздействием ошибка не должно
превышать
 зададимся
требуемой точностью:
зададимся
требуемой точностью:

Используя
заданную требуемую ошибку контура,
найдем
 :
:

Система должна выполнять перенацеливание антенны из любых положений и при любых возможных внешних воздействиях, то есть необходимо иметь запас по скорости.
Необходимо
иметь пятикратный запас по скорости,
поэтому следует увеличить
 на
на
Пересчитаем усиление контура с учетом запаса по скорости:

Тогда коэффициент передачи разомкнутого контура:

ЖЛАХ системы можно разделить на 3 участка:
Низкочастотная область ЛАЧХ определяет статическую точность системы (точность в установившихся режимах)
Среднечастотная область определяет запасы устойчивости по амплитуде фазе и, следовательно, качество системы с единичной обратной связью. Также, эта область определяет «грубость» системы, то есть низкую чувствительность показателей качества параметров звеньев.
Высокочастотная область ЛАЧХ, определяет фильтрующие свойства системы и незначительно влияет на динамические свойства системы. Лучше иметь больше ее асимптоты, что уменьшит требуемую мощность исполнительного органа и влияние высокочастотных помех, то есть подойдет +2 наклон.
На рисунке 5 показана полученная ЖЛАХ:

Передаточная функция разомкнутого контура для ЖЛАХ имеет следующий вид:

Определим параметры ЖЛАХ (постоянные времени).
Положение всей ЛАХ задается точкой пересечения первой асимптоты с осью нуля децибел. Этой точке соответствует частота, называемая базовой:

Далее делаем расчет исходя из показателя колебательности.
Показателей колебательности называется максимальное значение ординаты амплитудой характеристики замкнутой системы при начальной ординате равной единице, то есть относительная высота резонансного пика.
Для большинства следящих систем показатель колебательности 1,1-1,5 является вполне достаточным. Выбираем М=1,1
Тогда
определяем постоянные времени
 и
и из следующих уравнений:
из следующих уравнений:
При этих постоянных времени мы получаем заданный показатель колебательности. Для обеспечения дополнительного запаса устойчивости проверим полученные постоянные времени на выполнение условий:
Для
Для

Где
 – частота, которая соответствует точке
пересечения второй асимптоты с осью
нуля децибел, то есть частота среза.
– частота, которая соответствует точке
пересечения второй асимптоты с осью
нуля децибел, то есть частота среза.

Проверим выполнение этих неравенств:
И
значит условие для
 выполняется.
выполняется.

И
значит условие для
 выполняется.
выполняется.
Коэффициент передачи регулятора равен:

Определение частоты дискретизации системы
Так как система управление СНА не непрерывна, а дискретна найдем условие её устойчивости и граничную частоту.
Характеристический полином дискретной системы имеет вид:

Осуществим z-преобразование и приравняем характеристический полином к нулю:

Упростив данное выражение, получим:

Для устойчивости системы необходимо, чтобы все коэффициенты характеристического полинома были положительны, то есть:

То
есть ограничением является неравенство

Отсюда

Достаточным условием является выполнение неравенства:

Данное условие выполняется всегда, значит единственное ограничение частоты:

Возьмем десятикратный запас, следовательно,

Частоту дискретизации для информационного канала удвоим.

Выбор конструктивно-компоновочной схемы механизма
Исходя из того, что диапазон рабочих углов относительно невелик, выбираем классический карданов подвес.
Существует три вида данного механизма: одноосный, двуосный и трёхосный. В нашем случае антенну требуется проворачивать относительно двух ортогональных осей, поэтому используем механизмы с двумя степенями свободы.
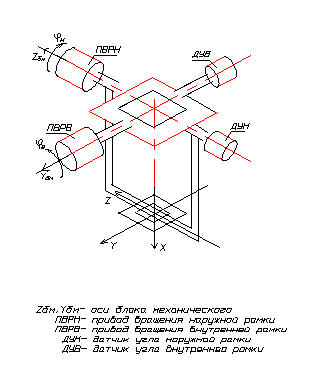
Классическим представлением такого механизма является карданов подвес с перекрещивающимися осями, показанный на рисунке 6.
Существует два вида расположения осей рамок вращения: горизонтальное и вертикальное.
Во
всех случаях двухосного подвеса с
горизонтальным расположением оси
внешней рамки не возникает трудностей
при визировании точек на окружающей
сфере, близких к зениту, то есть при

Поэтому выбираем горизонтальное расположение оси внешней рамки.
При поворотах объекта направления осей рамок (внешней и внутренней) системы будут сохраняться благодаря обкатке рамок подвеса вокруг осей горизонтального и вертикального наведения.
Скорости
обкатки рамок механизма, то есть скорости
 ,
которые должны обеспечивать системой
наведения, определяются условием: сумма
проекций скоростей обкатки рамок и
скоростей поворота объекта на каждую
из осей неподвижной системы координат
должна равняться нулю.
,
которые должны обеспечивать системой
наведения, определяются условием: сумма
проекций скоростей обкатки рамок и
скоростей поворота объекта на каждую
из осей неподвижной системы координат
должна равняться нулю.
Это условие дает систему трех уравнений:

Где
 – проекции скоростей обкатки на оси
системы координатOXYZ;
– проекции скоростей обкатки на оси
системы координатOXYZ;
 –проекции
скоростей поворота объекта на те же
оси.
–проекции
скоростей поворота объекта на те же
оси.
Положение Земли в системе координат антенны Oxyz определяется углами α и β.
 Рисунок
6.
ККС двухосного карданова подвеса.
Рисунок
6.
ККС двухосного карданова подвеса.
Совместное решение уравнений дает скорости обкатки рамок подвеса по осям горизонтального и вертикального наведения, обусловленные поворотами объекта:
 –для
внешней рамки
–для
внешней рамки
 -
для внутренней рамки.
-
для внутренней рамки.
Где
 – проекции скоростей поворота объекта
вокруг осейOx,
Oy,
Oz.
– проекции скоростей поворота объекта
вокруг осейOx,
Oy,
Oz.
Из
формул видно, что величина предельно
допустимого угла равна максимально
возможному углу
 ,
так как тангенс этого угла входит в
уравнения для внешней рамки.
,
так как тангенс этого угла входит в
уравнения для внешней рамки.
При
угле
 имеем наихудший случай: скорость обкатки
внешней рамки максимальна.
имеем наихудший случай: скорость обкатки
внешней рамки максимальна.
Для
нахождения предельно допустимого угла
максимальное значение скорости обкатки
 принимаем равной скорости целеуказаний,
взятой с пятикратным запасом.
принимаем равной скорости целеуказаний,
взятой с пятикратным запасом.


Следовательно,
Так как полученное значение допустимого угла больше заданного диапазона углов, то, следовательно, можно использовать в качестве блока механического двухосную схему «карданов подвес» с горизонтальным расположением оси внешней рамки, так как она не ограничивает данный диапазон.
Определение требований к приборам системы
Приведем перечень команд управления, управляющих сигналов, ТМ-параметров. Перечень команд управления составляется на основании документации, прилагаемой к приборам, составляющих систему, а также логики функционирования приборов и ПО.
Базовый набор команд управления для разрабатываемой СНА приведен в таблице 5.
Таблица 5. Команды управления СНА
|
Команда |
Расшифровка |
|
ВКЛ БУП 1 |
Включение первого комплекта БУП |
|
ВКЛ БУП 2 |
Включение второго комплекта БУП |
|
ОТКЛ |
Отключение работавшего до этой команды комплекта |
|
ВКЛ ДУ 1 |
Включение первого комплекта ДУ |
|
ВКЛ ДУ 2 |
Включение второго комплекта ДУ |
|
ОТКЛ |
Отключение работавшего до этой команды комплекта |
|
+Н |
Вращение по координате Н в положительном направлении |
|
-Н |
Вращение по координате Н в отрицательном направлении |
|
+В |
Вращение по координате В в положительном направлении |
|
-В |
Вращение по координате В в отрицательном направлении |
|
СТОП Н |
Прекращение вращения по координате Н |
|
СТОП В |
Прекращение вращения по координате В |
|
РРУ |
Переход в режиме ручного управления |
|
РУК |
Переход в режиме управления по коду |
|
ИСХ |
Возврат в нулевое положение |
Управляющим сигналами СНА являются целеуказания, выдаваемые ПО СНА. Код с ПО СНА несет в себе информацию о следующих величинах:
Угол поворота
Скорость изменения ЦУ
Время формирования ЦУ
Управляющими воздействиями на БУП являются только угол поворота.
ТМ-параметры – это сигнальные информационные данные, выдаваемые через аппаратуру сбора и выдачи телеметрической информации.
ТМ-параметры СНА является информация о том, что:
Первый комплект БУ СНА включен
Первый комплект БУ СНА выключен
Второй комплект БУ СНА включен
Второй комплект БУ СНА выключен
Оценочные расчеты потребляемой мощности и массы системы представлены в таблицах 6 и 7 соответственно.
Таблица 6. Оценочный расчет потребляемой мощности
|
Мощность, потребляемая двигателем |
|
|
Мощность, потребляемая БУП |
|
|
Мощность, потребляемая ИК |
|
|
Суммарная мощность по одной координате |
|
|
Мощность, потребляемая СНА |
|
 4343
4343



Таблица 7. Оценочный расчет массы системы
|
Масса БМ:
|
97,4 37,2 0,2 60 |
|
Масса БУ |
±5 |
|
Масса СНА |
102,4 |