

Основные технические данные агд-1
1. Гидродатчик АГД-1 с указателями горизонта потребляет токи:
— от источника переменного напряжения 36 В 400 Гц: при одном указателе — не более 1,6 А, при двух указателях — не более 2 А;
— от источника постоянного напряжения: при одном указателе—не более 0,75 А, при двух указателях—не более 1,25.
2. Готовность комплекта к работе после включения питания — не более 1,5 мин.
3. Точность выдерживания вертикали гироскопом гиродатчика с включенной коррекцией на неподвижном основании: по крену ±0,25°, по тангажу ±0,2°.
4. Ошибки в показаниях углов крена после выполнения разворотов на углы до 360° — не более ±3°. Ошибки в показаниях углов крена и тангажа после выполнения любых фигур сложного пилотажа — не более ±5°.
5. Скорость поперечной коррекции гироскопа гиродатчика— (5±3) град/мин. Скорость продольной коррекции—(2±1) град/мин.
6. Максимальная скорость отработки следящей рамы гиродатчика — не менее 360 град/с.
7. Погрешность в передаче углов крена и тангажа на указатель горизонта — не более ±2,5°.
8. Чувствительность указателя горизонта к изменению углов крена и тангажа — не ниже 0,3°.
9. Рабочий диапазон температур—от —50 до +60° С.
10. Масса агрегатов: гиродатчика—7 кг, указателя 2,6 кг.
Гировертикали с силовой гироскопической стабилизацией
Широкое применение гироскопических приборов привело к необходимости использования одного гироскопа в качестве датчика сигналов об угловом положении самолета сразу для нескольких потребителей. При этом потребовалось нагружать оси рам гироскопов сразу несколькими датчиками. В других случаях рамы подвеса гироскопа используются в качестве основания для крепления устройств, положение которых в пространстве необходимо стабилизировать, например антенн, прицелов, акселерометров инерциальных навигационных систем. Во всех этих случаях оси рам гироскопа оказываются сильно нагруженными либо моментами датчиков, либо моментами трения.
Нагрузка осей рам подвеса гироскопа приводит к значительному понижению точности его стабилизации. Для повышения точности стабилизации гироскопа используется силовая гироскопическая стабилизация.
Рассмотрим принцип силовой гиростабилизации на следующем примере. Пусть по оси OZ подвеса наружной рамы трехстепенного гироскопа (рис. ) действует момент внешних сил Л1в, стремящийся повернуть раму. Под действием момента МВ гироскоп прецессирует вокруг оси OY подвеса внутренней рамы. Вследствие этого движения возникает гироскопический момент МГ, направленный в сторону, противоположную моменту МВ и равный ему по величине. Этот гироскопический момент компенсирует момент внешних сил, и наружная рама сохраняет свое первоначальное положение.
Отклонение гироскопа относительно оси OY (угол β) фиксирует датчик угла (потенциометр П), сигнал которого поступает на момснтный электродвигатель М стабилизации, развивающей момент МС, противодействующий МВ. Прецессия гироскопа прекратится при угле β, что соответствует
![]()
Если момент внешних сил МВ устранится, компенсирующий его ранее момент МС двигателя вызовет прецессию гироскопа к первоначальному положению. По мере поворота гироскопа будет уменьшаться и величина момента МС двигателя. Как только гироскоп достигнет такого положения, при котором момент двигателя станет равным нулю, дальнейшая прецессия гироскопа прекратится.
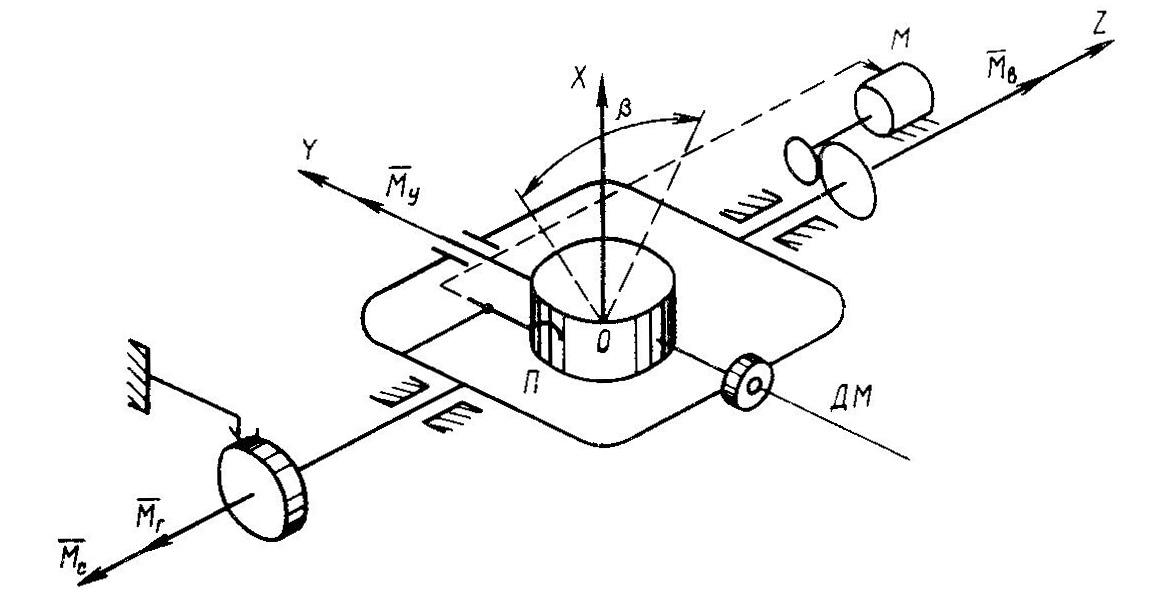
Таким образом, в равновесном состоянии электродвигатель разгружает наружную раму от возмущающих моментов по оси подвеса, вследствие чего его называют двигателем разгрузки. В переходном режиме момент Мв компенсируется суммой моментов
![]()
Движение гироскопа относительно оси OY ограничено упорами. Поэтому, если момент внешних сил МВ будет больше максимального развиваемого двигателем М момента стабилизации МС, гироскоп ляжет на упор, потеряет устойчивость и начнет поворачиваться относительно оси OZ под действием разности моментов МВ – МС. Уход наружной рамы относительно ее первоначального положения будут вызывать также моменты, приложенные по оси OY.
Для управления
угловым положением наружной рамы
используют датчик ДМ моментов на оси
OY.
Под действием его момента My
гироскоп прецессирует относительно
оси OZ
с угловой скоростью
![]() .
Формирование момента My
обеспечивается специальной схемой
управления (коррекции), которая аналогична
системе коррекции, применяемой в
авиагоризонтах.
.
Формирование момента My
обеспечивается специальной схемой
управления (коррекции), которая аналогична
системе коррекции, применяемой в
авиагоризонтах.
Рассмотренная система называется одноосным силовым гиростабилизатором. Примерами двухосных систем силовой гиростабилизацни служат гировертикали типов ЦГВ и МГВ, применяемые, как и авиагоризонты, в качестве датчиков углов крена и тангажа.
Центральная гировертикаль представляет собой двухосную гиростабилизированную платформу (рис. ). Платформа 8, имеющая форму полого цилиндра, подвешена в раме 2. На платформе расположены два двухстепенных гироскопа 7, 9, векторы кинетических моментов которых направлены перпендикулярно плоскости платформы и в противоположные стороны. Сигналы, пропорциональные углам поворота гироузлов относительно платформы, снимаются с потенциометров 6, 10, намотанных на кожухи гироузлов, с помощью щеток 14, 15. Напряжения с потенциометров поступают на двигатели стабилизации 3, 12. Потенциометры 6, 10 и двигатели 3, 12 образуют систему силовой разгрузки. При действии момента внешних сил по оси подвеса наружной рамы прецессирует гироскоп 9 и сигнал с потенциометра 10 поступает на двигатель разгрузки 12, который создает момент стабилизации уравновешивающий момент внешних сил. В том случае, если момент внешних сил действует по оси подвеса платформы, прецессирует гироскоп 7. Вследствие этого появляется сигнал с потенциометра 6 и двигатель 3 развивает момент, компенсирующий момент внешних сил.

Коррекция платформы по вертикали производится системой коррекции, включающей датчик жидкостно-маятниковый 4 и коррекционные двигатели 5, 11. При отклонении платформы от вертикали относительно оси подвеса платформы сигнал с датчика 4 поступает на коррекционный двигатель 5, который создает момент относительно оси подвеса гироскопа 7, что вызывает прецессию платформы в направлении устранения ее рассогласования с вертикалью. Отклонение платформы от вертикали относительно оси подвеса наружной рамы (вместе с рамой) приводит к поступлению сигнала с ДЖМ на коррекционный двигатель 11. Двигатель 11 создаст момент относительно оси подвеса гироскопа 9, что вызывает прецессию платформы (вместе с рамой) в направлении, противоположном направлению отклонения ее от вертикали.
Сигналы, пропорциональные углам крена и тангажа, снимаются с датчиков 1 и 13.
Элементы схемы ЦГВ образуют три системы:
а) систему силовой разгрузки, состоящую из потенциометров 6, 10 и двигателей разгрузки 3, 12;
б) систему коррекции, состоящую из датчика жидкостно-ма-ятникового 4 и коррекционных двигателей 5, 11;
в) систему ускоренного приведения к вертикали, состоящую из маятников 16, 17 и двигателей разгрузки 3, 12.
Работа систем силовой разгрузки и коррекции описана выше. Рассмотрим работу системы ускоренного приведения ЦГВ к вертикали. ЦГВ не имеет арретирующего устройства, следовательно, в момент подачи питания на прибор рамы карданова подвеса занимают произвольное положение. При наклонах платформы относительно плоскости горизонта на углы более 2° замыкаются контакты маятников 16 и 17. Например, при наклоне платформы по оси подвеса наружной рамы у маятника 17 замыкается средний контакт с одним из крайних. Напряжение источника питания через замкнутый контакт подается на одну из половин (в зависимости от направления наклона платформы) второй управляющей обмотки двигателя разгрузки 12, который приложит к оси наружной рамы вращающий момент. Под действием этого момента гироскоп 9 будет прецессировать, при этом с потенциометра 10 на первую управляющую обмотку двигателя 12, используемую в системе силовой разгрузки, будет идти постоянно возрастающий сигнал, пропорциональный углу поворота гироскопа 9, причем этот сигнал всегда меньше сигнала, поступающего на вторую обмотку. Когда гироскоп в результате прецессии дойдет до упopa, двигатель 12 станет поворачивать платформу вокруг оси подвеса наружной рамы, как обыкновенное негироскопическое тело до размыкания контактов маятника 17.
Поскольку направления вращения роторов гироскопов противоположны, возникающие при этом гироскопические моменты взаимно компенсируются, что облегчает работу двигателя 12. После размыкания контактов маятника 17 платформа к вертикальному положению приводится системой коррекции. Аналогично работает система приведения по оси подвеса платформы, включающая маятник 16 и двигатель 3.
Существует несколько модификаций ЦГВ, например ЦГВ-4, ЦГВ-10, МГВ. Принцип их действия аналогичен рассмотренному. Отличие модификаций ЦГВ заключается в количестве датчиков углов крена и тангажа. Кроме того, в ЦГВ-10П кроме потенциометрических датчиков установлены также сельсины-датчики крена и тангажа, а в МГВ в качестве датчиков углов крена и тангажа наряду с потенциометрами применены также синусно-косинусные трансформаторы.
Свойства гироскопа с двумя степенями свободы