

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Самарский государственный аэрокосмический
университет имени академика С.П. Королева»
(национальный исследовательский университет)
В.И. Санчугов, Л.В. Родионов
Переходные и частотные характеристики
Типовых звеньев
Систем автоматического регулирования
Учебное пособие
С А М А Р А 2010
УДК 681.5; 681.51; 681.52; 681.51.011
|
|
Переходные и частотные характеристики типовых звеньев систем автоматического регулирования: Учебное пособие / Самар. гос. аэрокосм. ун-та; В.И. Санчугов, Л.В. Родионов. – Самара, 2010. 36 с. |
Рассмотрены теоретические основы определения переходных и частотных характеристик типовых динамических звеньев систем автоматического регулирования. Описаны уравнения типовых звеньев систем автоматического регулирования и примеры их реализации, используемые в системах автоматики авиационной техники. Представлены переходные и частотные характеристики апериодических, колебательных, дифференцирующих и интегрирующих звеньев.
Изложены методики исследования переходных и частотных характеристик с использованием программного обеспечения MATLABиSimulink.
Учебное пособие предназначено для студентов, обучающихся по специальностям 150802 «Гидравлические машины, гидроприводы и гидропневмоавтоматика», 160301 «Авиационные двигатели и энергетические установки» и 130300 «Техническая эксплуатация летательных аппаратов и двигателей».
Печатается по решению редакционно-издательского совета Самарского государственного аэрокосмического университета
Рецензент: д-р техн. наук, доцент. А.Б. Прокофьев
Содержание
|
1 Основные понятия. Виды и уравнения типовых звеньев |
4 |
|
2 Переходные характеристики типовых звеньев |
15 |
|
3 Частотные характеристики типовых звеньев |
22 |
|
4 Рекомендации по проведению самостоятельного исследования характеристик типовых звеньев. Основные цели выполнения лабораторных работ |
31 |
|
4.1 Алгоритмы построения переходных характеристик типовых звеньев |
31 |
|
4.2 Алгоритмы построения частотных характеристик типовых звеньев |
32 |
|
5 Отчет о проделанной работе |
33 |
|
6 Контрольные вопросы |
34 |
|
7 Варианты задания для лабораторных работ |
34 |
|
Список использованных источников |
35 |
1 Основные понятия. Виды и уравнения типовых звеньев
Любую систему автоматического регулирования (САР) можно представить в виде соединения отдельных типовых звеньев. Типовым звеном (ТЗ) называют элемент или узел системы регулирования, который независимо от физической природы процессов, протекающих в нем, одинаково реагирует на один и тот же вид возмущения. Это означает, что два или несколько звеньев САР будут одного типа, если они имеют одинаковую функциональную зависимость между входным и выходным параметрами.
Для всех ТЗ характерны некоторые общие признаки: каждое ТЗ имеет четко обозначенный вход и выход; сигнал через ТЗ распространяется в одном направлении - со входа на выход. В структурных схемах САР типовое звено обозначают в виде прямоугольника, внутри которого записывается его функциональная зависимость, выраженная в операторной форме (передаточная функция).
Разбивка САР на ТЗ облегчает анализ и синтез системы, так как позволяет воспользоваться хорошо разработанными в теории автоматического регулирования (ТАР) методами.
По виду функциональной зависимости ТЗ подразделяются на апериодическое, колебательное, дифференцирующее, интегрирующее, усилительное и звено чистого запаздывания. Это основные типы звеньев, с использованием которых могут быть получены другие типовые звенья, но не более второго порядка (по виду дифференциального уравнения). Уравнения ТЗ систем регулирования выводятся на основе тех или иных физических законов, по которым протекают процессы в звеньях. При исследовании динамики в САР нужно уметь не только выделять ТЗ в системе регулирования и составлять их уравнения, но и определять численные значения входящих в уравнения коэффициентов. Существуют два метода определения этих коэффициентов: расчетный и экспериментальный. Расчетный метод не во всех случаях достаточно точен. Принятые при выводе уравнений допущения могут привести к существенным ошибкам. Поэтому на этапе доводки САР часто применяют экспериментальный метод определения коэффициентов. При этом можно воспользоваться переходными или частотными характеристиками ТЗ.
В качестве примеров рассмотрены звенья, которые часто реализуются в САР авиационных двигателей. При выводе уравнении ТЗ основная трудность заключается в обосновании и принятии упрощающих допущений. Учет многих факторов приводит к усложнению расчетной модели, а принятие грубых допущений к исключению из анализа основных свойств звена. Поэтому нужно всегда иметь в виду, в рамках какой расчетной динамической модели системы будет исследоваться то или иное звено.
Апериодическое типовое звено. Одновальный ТРД (рисунок 1,а) при определенных допущениях является характерным примером апериодического ТЗ.
|
|
|
Рисунок 1 - Примеры апериодических типовых звеньев |
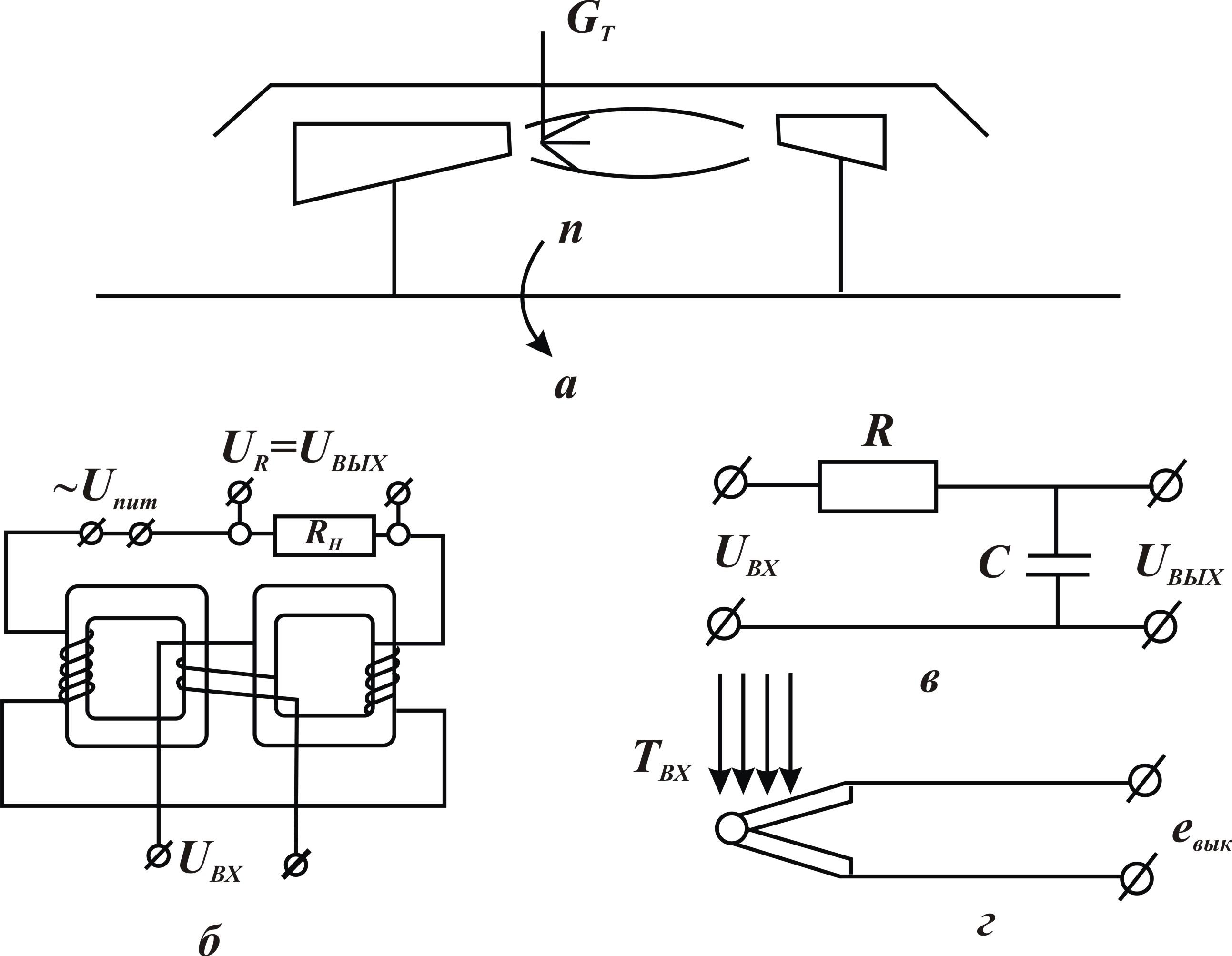
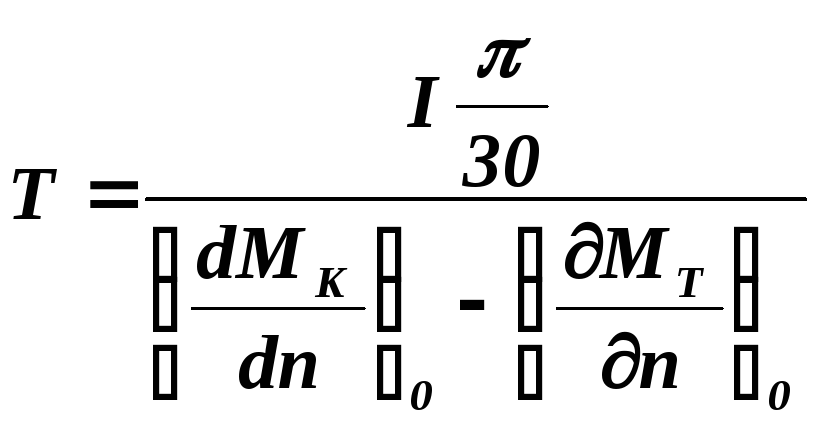
Для ТРД одним из основных выходных регулируемых параметров является частота вращения ротора двигателя п, а входных — расход топлива в камере сгорания GT .Основной зависимостью, которая используется при проектировании САР двигателя, является выражение, связывающее частоту вращения ротора п и расход топлива GT в неустановившемся режиме. Эта зависимость определяется уравнением движения ротора двигателя
![]() (1)
(1)
где I - момент инерции ротора двигателя; Мт(n,GT) - момент, развиваемый турбиной; Мк(n) - момент противодействия компрессора.
Принимая допущение о малости изменения параметров n и GT, в «окрестности» какого-либо установившегося режима, можно представить уравнение (1) в следующей линеаризованной форме:
![]()
или
 (2)
(2)
где ![]() ,
,
![]() малые отклонения параметров от их
установившихся значений; индекс «0»
соответствует значениям производных,
взятых для установившегося режима –
n0,
GT0.
малые отклонения параметров от их
установившихся значений; индекс «0»
соответствует значениям производных,
взятых для установившегося режима –
n0,
GT0.
Уравнение (2) является дифференциальным уравнением ТРД, которое можно представить в стандартной форме:
![]() ,
,
где
 - постоянная времени
двигателя;
- постоянная времени
двигателя;
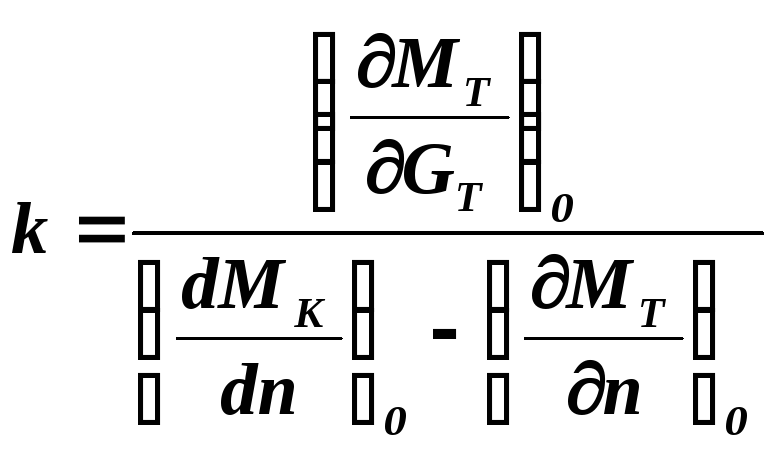 - коэффициент
усиления двигателя.
- коэффициент
усиления двигателя.
ТРД как объект регулирования представляет собой апериодическое ТЗ, дифференциальное уравнение которого имеет вид
![]() , (3)
, (3)
где
![]() ,
,![]() - входной и выходной параметры ТЗ;Т
- постоянная времени;
k
- коэффициент усиления ТЗ.
- входной и выходной параметры ТЗ;Т
- постоянная времени;
k
- коэффициент усиления ТЗ.
Уравнением апериодического звена описываются также магнитный усилитель (рисунок 1,б), электрическая RC- цепь (рисунок 1,в), термопара (рисунок 1,г). Например, для электрической цепи на основании второго закона Кирхгофа записать
![]() (4)
(4)
Ток в цепи
определяется выражением
![]() ,
подставляя которое в уравнение (4),
получим:
,
подставляя которое в уравнение (4),
получим:
![]() (5)
(5)
Обозначив Т =RC, можно записать уравнение (5) в форме уравнения апериодического звена.
![]()
Колебательное типовое звено. Из теоретической механики известно, что любую колебательную систему с одной степенью свободы (рисунок 2,а) можно описать дифференциальным уравнением второго порядка
![]() (6)
(6)
где T
- постоянная времени, характеризующая
собственную частоту колебаний сиcтемы;
![]() - коэффициент демпфирования;k
- коэффициент усиления или коэффициент
передачи.
- коэффициент демпфирования;k
- коэффициент усиления или коэффициент
передачи.
|
|
|
Рисунок 2 - Примеры колебательных типовых звеньев |
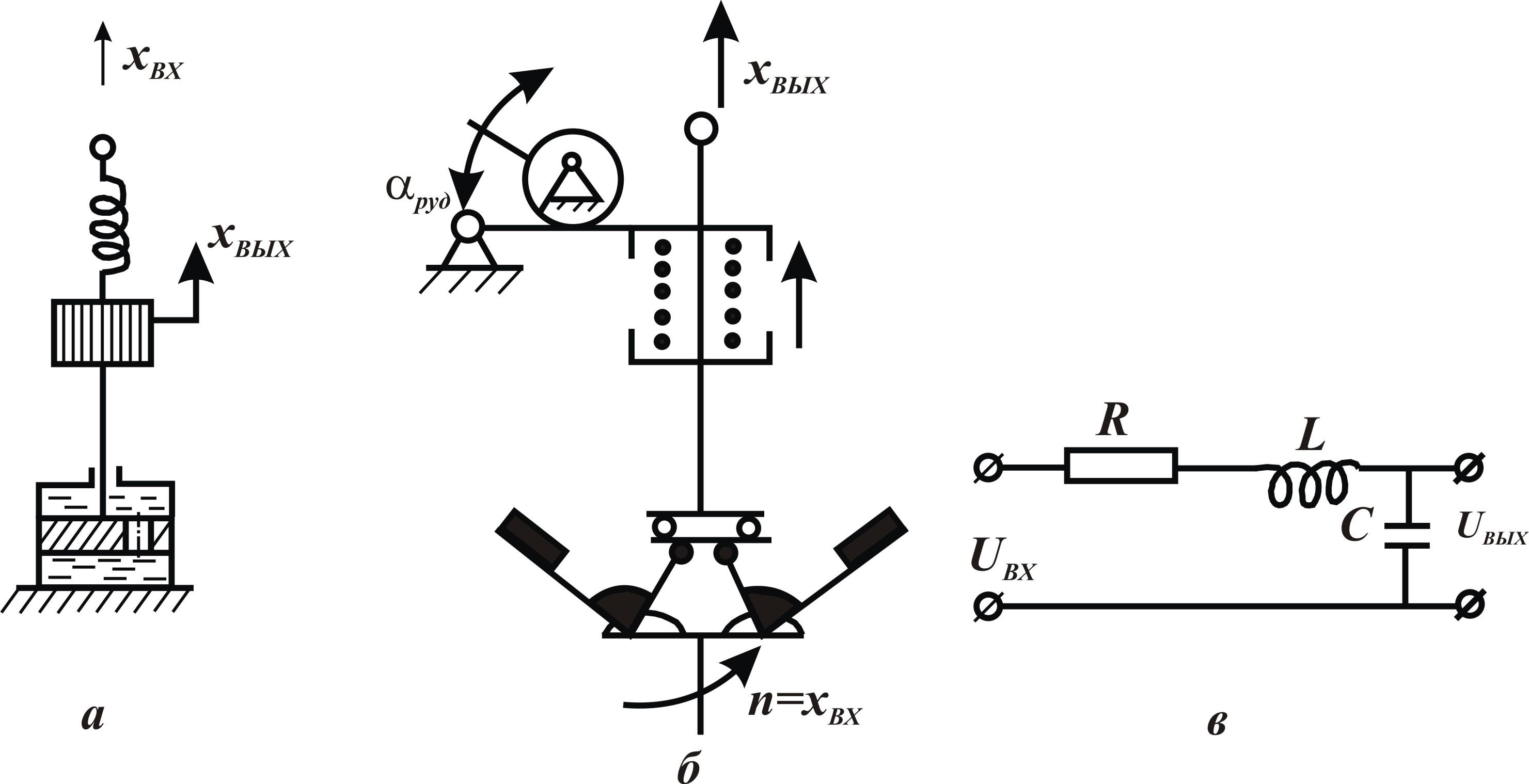
Звено, описываемое дифференциальным уравнением (6), называют колебательным ТЗ. К колебательному ТЗ можно отнести также центробежный чувствительный элемент частоты вращения (рисунок 2,б) и электрический колебательный контур (рисунок 2,в). Согласно второму закону Кирхгофа для электрической цепи можно записать
![]() (7)
(7)
Падения напряжения на индуктивности L, активном сопротивлении R и емкости С определяются из выражений
![]() (8)
(8)
где
![]()
Подставляя выражения (8) в уравнение (7) с учетом равенства для тока i, получим:
![]()
или
![]() (9)
(9)
где
![]() - постоянная величина;
- постоянная величина;![]() - коэффициент демпфирования.
- коэффициент демпфирования.
Как видно из уравнения (9), электрический контур представляет колебательное ТЗ.
Дифференцирующее типовое звено. Дифференцирующее типовое может быть идеальным и реальным. Идеальное дифференцирующее ТЗ описывается зависимостью
![]()
![]() (10)
(10)
где k - коэффициент передачи звена.
Примером идеального дифференцирующего ТЗ является подпружиненный поршень (рисунок 3а), применяемый как корректирующее устройство для улучшения динамических свойств регулятора. Уравнение такого поршня связывает давления ∆Рвх на входе с динамическим расходом жидкости ∆Q в (выходном) штуцере. Считая жидкость несжимаемой и допуская, что инерционные силы и силы трения малы, можно записать уравнения баланса сил и расхода жидкости:
 (11)
(11)
где ![]() - площадь поршня;
- площадь поршня; ![]() - жесткость пружины;
- жесткость пружины; ![]() – перемещение поршня.
– перемещение поршня.
В результате совместного решения уравнений (11) получим
![]() (12)
(12)
где
![]() - коэффициент передачи статической
части регулятора.
- коэффициент передачи статической
части регулятора.
-

Рисунок 3 - Примеры идеальных дифференцирующих типовых звеньев
Если обозначить ∆Q = хвых, а ∆р = хвх, то уравнение (12) примет вид уравнения для идеального дифференцирующего ТЗ (10). Другим примером этого ТЗ является тахогенератор (рисунок 3,б). Напряжение на выходе из тахогенератора Uвых пропорционально частоте вращения или производной от угла поворота якоря:
![]() .
.
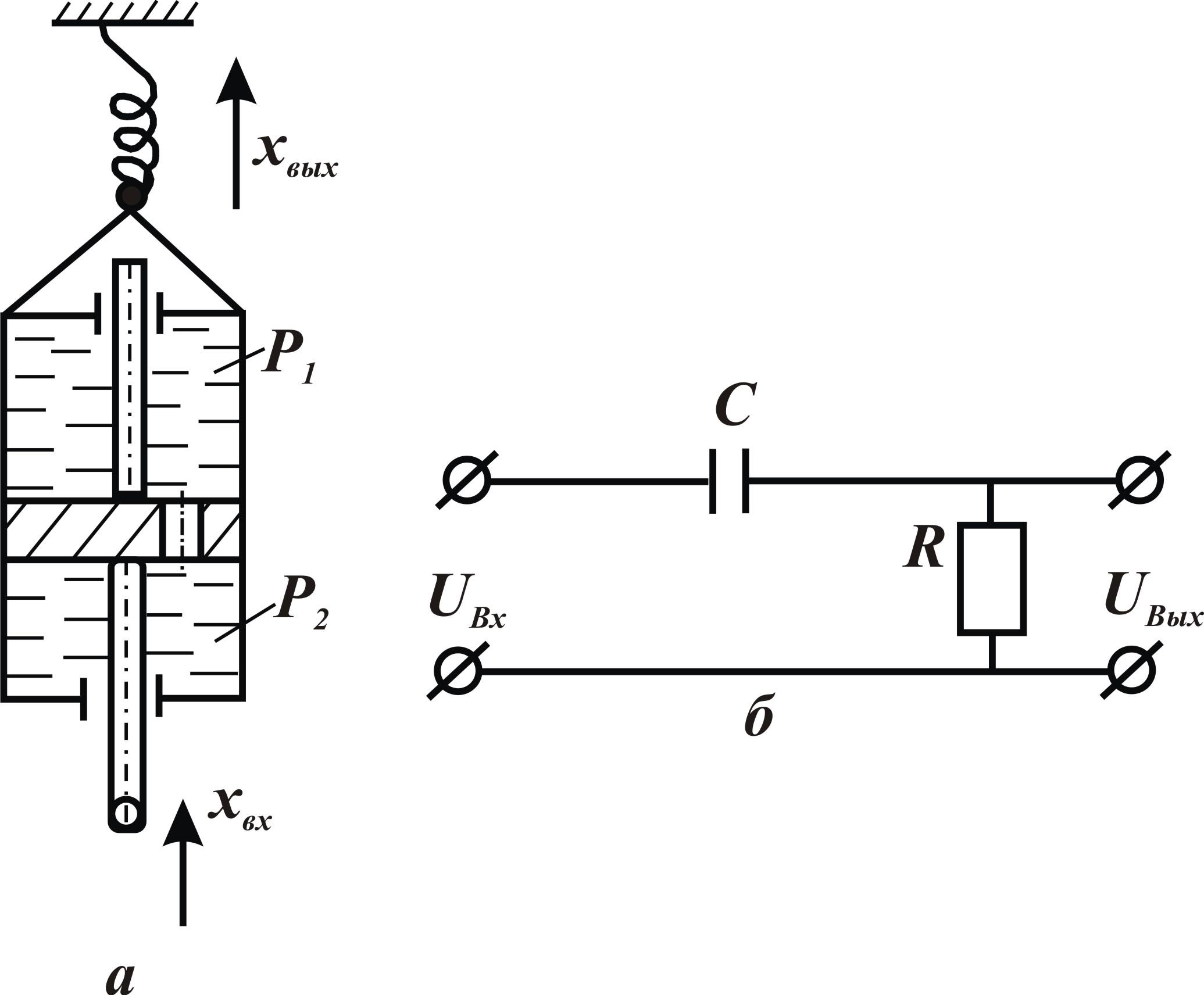
Примером реального дифференцирующего звена является катаракт (рисунок 4,а), устанавливаемый в цепи местной обратной связи изодромного регулятора и служащий для улучшения качества переходного процесса в САР. Входным параметром является перемещение штока поршня хвх, а выходным - координата цилиндра хвых.
|
|
|
Рисунок 4 - Примеры реальных дифференцирующих типовых звеньев |
Из совместного решения уравнений баланса сил
![]() ,
,
расхода через отверстие в поршне
![]() ,
,
а также движения жидкости через жиклер
![]()
получим уравнение катаракта
![]() , (13)
, (13)
где FП - площадь поршня; СПР - жесткость пружины; Rж – гидравлическое сопротивление жиклера (при ламинарном движении жидкости); Qж - объемный расход жидкости через жиклер.
Уравнение (13) можно представить в следующем виде:
![]() (14)
(14)
где
![]() -постоянная
времени; k
- коэффициент передачи звена (в данном
случае k
=1).
-постоянная
времени; k
- коэффициент передачи звена (в данном
случае k
=1).
Уравнение (14) является уравнением реального дифференцирующего звена. Другим примером такого звена является электрическая CR - цепь (рисунок 4,б). Воспользовавшись вторым законом Кирхгофа, можно вывести для этой цепи уравнение
![]() (15)
(15)
Интегрирующее типовое звено. Интегрирующее ТЗ характеризуется тем, что выходной параметр определяется интегралом по времени от входного параметра и описывается зависимостью
![]() , (16)
, (16)
![]() –коэффициент
передачи звена.
–коэффициент
передачи звена.
Наглядными примерами интегрирующего звена являются гидроцилиндры различных типов и гидромеханический усилитель (рисунок 5).
|
|
|
Рисунок 5 – Примеры интегрирующих типовых звеньев |
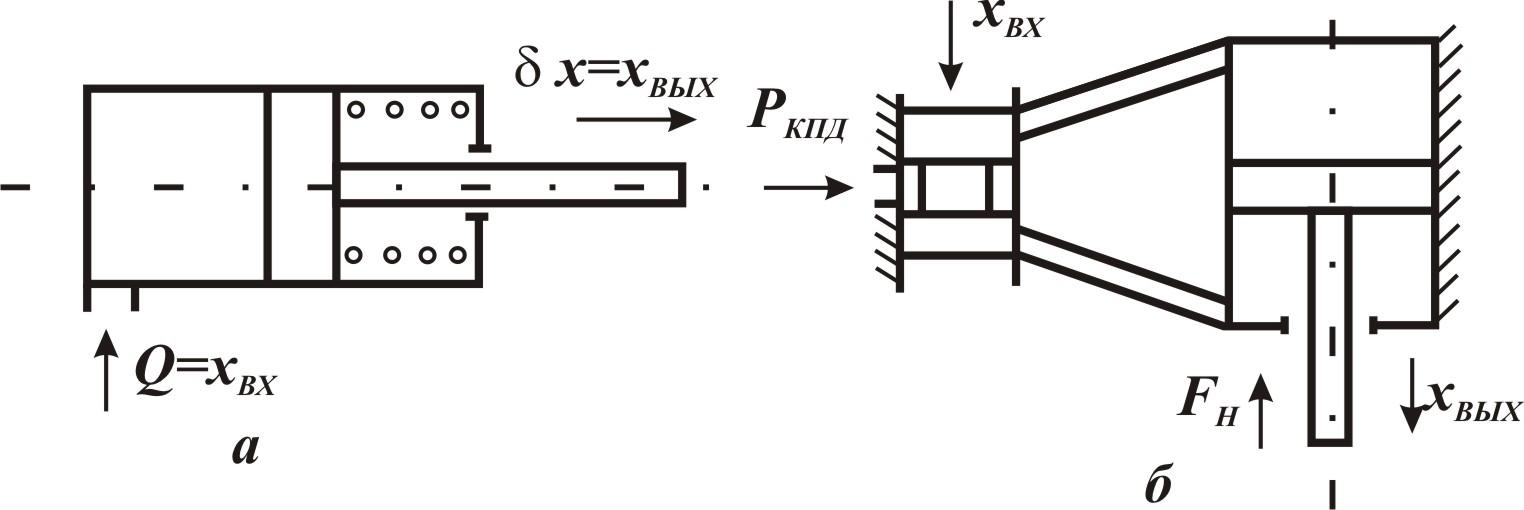
Перемещение
выходного штока
![]() гидравлического цилиндра, представленного
на рисунке 5а и расход поступающей
жидкости
гидравлического цилиндра, представленного
на рисунке 5а и расход поступающей
жидкости![]() связаны соотношением
связаны соотношением
![]() (17)
(17)
где S – площадь цилиндра.
При выводе уравнения гидромеханического усилителя, представленного на рисунке 5б в качестве упрощающих допущений можно принять сопротивления нагрузки FН и давление в питающем трубопроводе PКПД постоянными, ширину поясков управляющего золотника равной ширине отверстий, отсутствие сил трения и утечек в золотнике и силовом цилиндре и отсутствие давления на сливе жидкости из золотника.
С учетом принятых допущений скорость перемещения поршня может быть определена в следующем виде:
 (18)
(18)
где - коэффициент расхода в щелях золотника; S – площадь силового поршня; Ж - плотность жидкости; L – длина цилиндра.
Обозначив величиной K в формуле (18) выражение
 (19)
(19)
уравнение усилителя можно записать в виде:
![]() (20)
(20)
которое после несложных преобразований представляет собой уравнение интегрирующего звена (16):
![]() (21)
(21)