

4.2. Приемники акустических сигналов
Поскольку акустические волны – это колебания давления, то для восприятия их применяют элементы, чувствительные к быстрым колебаниям внешнего давления. Как правило, это легкие мембраны или диафрагмы, преобразующие колебания давления воздуха, жидкости или твердого тела в механические колебания, которые, в свою очередь, превращаются далее в электрические сигналы или в сигналы другой природы.
Датчики, чувствительные к звуковым волнам, распространяющимся в воздухе или в газах, обычно называют микрофонами; датчики, чувствительные к акустическим волнам, которые распространяются в воде или в жидкостях, – гидрофонами; а датчики акустических волн в твердых телах, – стетоскопами. Врачи, например, уже много столетий применяют механические стетоскопы для прослушивания звуков внутри грудной клетки человека, возникающих в результате сокращений сердца, прохождения воздуха по дыхательным путям и т.д.
Основными параметрами акустических датчиков являются: частотный и динамический диапазоны, чувствительность, диаграмма направленности и амплитудно-частотная характеристика (АЧХ).
Прослушивающие устройства
Среди интеллектуальных акустических сенсоров имеются и приборы для незаметного прослушивания разговоров. Сразу же оговорим, что это является законным лишь при наличии разрешения суда или прокурора.
Существует много различных прослушивающих приборов, рассмотрим лишь один вариант, когда разговор ведется внутри помещения или автомобиля за закрытыми окнами, то для его прослушивания разработаны так называемые "лазерные микрофоны", принцип действия которых раскрывается на рис.4.1
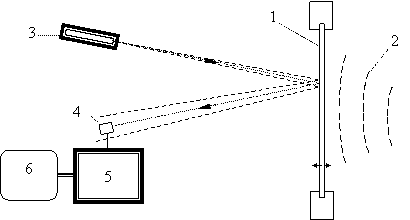
Рис. 4.1. Функциональная схема лазерного микрофона
Звуковые волны 2, достигая стекла 1, вызывают его вибрацию с соответствующими звуковыми частотами. Здесь стеклянная пластина окна играет роль мембраны – чувствительного элемента сенсора, который превращает звуковые сигналы в механические колебания. На значительном расстоянии от стекла (до 100–200 м) устанавливают лазер 3, невидимый (как правило, инфракрасный) модулированный луч которого направляют на стекло. На таком же примерно расстоянии в пределах конуса отраженного от стекла лазерного луча располагают приемный пункт, в состав которого входят один или несколько фотоприемников 4, электронный блок 5 и генератор звука 6 (наушники или громкоговоритель). При вибрациях стекла изменяется фаза световых колебаний, попадающих на фоточувствительный элемент в точке приема. Сигналы от него в электронном блоке усиливаются, фильтруются, детектируются и записываются, а также могут быть прослушаны через наушники 6.
4.3 Активные акустические сенсоры
До сих пор мы рассматривали в основном пассивные акустические сенсоры, "пассивные" в том плане, что акустические сигналы к ним приходят "со стороны", а сенсоры их лишь воспринимают. Однако разработаны и широко используются также и активные акустические сенсоры. Из них мы кратко рассмотрим эхолокаторы и диагностические ультразвуковые приборы.
Эхолокаторы,
Преимущество в эхолокации обычно отдают ультразвуковым (далее УЗ) волнам, поскольку они
УЗ волны средних и высоких частот довольно сильно поглощаются и быстро затухают в воздухе и газах. Поэтому для эхолокации в воздухе применяют преимущественно низкочастотные УЗ волны.
. Эхолотами называют все сенсоры, которые действуют по принципу восприятия звуков, отраженных от расположенных поодаль предметов, т.е. по принципу эха (от греческого "эхо" – отраженный звук, отзвук, отклик).
В гидролокации названия "гидролокатор" и "эхолокатор", "эхолот", "сонар" стали практически синонимами .
Излучатель и приемник УЗ волн, как правило, находятся в одном корпусе вместе с необходимой для измерений электроникой и с элементами, обеспечивающими направленность – концентрацию излучаемых и принимаемых УЗ волн в определенном секторе пространства.
Распространяясь
в воде, волны натыкаются на имеющиеся
в ней объекты, отражаются и рассеиваются
ими. Часть отраженных и рассеянных УЗ
волн в значительно ослабленном виде
возвращаются назад к акустической
антенне Пусть
![]() –
это минимальная дальность, которую
"просматривает" или "прослушивает"гидролокатор.
УЗ волна проходит до объектов, удаленных
на такое расстояние, и обратно за время
(формула 4.3)
–
это минимальная дальность, которую
"просматривает" или "прослушивает"гидролокатор.
УЗ волна проходит до объектов, удаленных
на такое расстояние, и обратно за время
(формула 4.3)
![]()
Здесь
![]() –
это скорость распространения УЗ волн
в воде. Длительность зондирующего УЗ
импульса не должна превышать это время,
поскольку иначе сигналы, отраженные от
наиболее близких целей, не будут приняты.
–
это скорость распространения УЗ волн
в воде. Длительность зондирующего УЗ
импульса не должна превышать это время,
поскольку иначе сигналы, отраженные от
наиболее близких целей, не будут приняты.
Пусть
![]() –
это максимальная дальность, которую
"просматривает" или "прослушивает"гидролокатор.
УЗ волна проходит расстояние до самых
удаленных объектов и обратно за время
(формула 4.4)
–
это максимальная дальность, которую
"просматривает" или "прослушивает"гидролокатор.
УЗ волна проходит расстояние до самых
удаленных объектов и обратно за время
(формула 4.4)
![]()
Период
посылки зондирующих УЗ импульсов не
должен быть меньше этого времени,
поскольку иначе сигналы, отраженные от
наиболее далеких целей, тоже не будут
приняты. Таким образом, диапазон
расстояний до объектов, обнаруживаемых
гидролокатором
(от
![]() до
до![]() ),
максимальная длительность зондирующих
УЗ импульсов
),
максимальная длительность зондирующих
УЗ импульсов![]() и
минимальный период их излучения
и
минимальный период их излучения![]() однозначно
между собой связаны.
однозначно
между собой связаны.
Одним из применений эхолокации уже не в воде, а в воздухе, является УЗ выявление присутствия объекта в контролируемой зоне и измерение расстояния до него. Особенно важным становится это в сложных условиях густого тумана, задымленности, запыленности и т.п., когда оптические методы "работают" плохо. А для УЗ волн это всё – не помеха. В качестве источника ультразвука чаще всего применяют пьезоэлектрические преобразователи.
По
измеренному времени запаздывания
![]() рассчитывается
расстояние до объекта (формула 4.5)
рассчитывается
расстояние до объекта (формула 4.5)
![]()
где
![]() –
скорость распространения ультразвука
в воздухе.
–
скорость распространения ультразвука
в воздухе.
Как и
в гидролокации, длительность импульсов
![]() определяет
минимальное расстояние до объекта,
которое можно измерить (формула 4.6),
определяет
минимальное расстояние до объекта,
которое можно измерить (формула 4.6),
![]()
Частота
зондирования
![]() определяет
максимальное расстояние, которое можно
измерить (формула 4.7),
определяет
максимальное расстояние, которое можно
измерить (формула 4.7),
![]()
От
частоты зондирующих УЗ волн
![]() зависит
длина волны (формула 4.8),
зависит
длина волны (формула 4.8),
![]()
и определяемая этим разрешающая способность сенсора, т.е. минимальные размеры объектов, присутствие которых еще можно зафиксировать. В воздухе на частоте выше 340 кГц длина волны составляет менее 1 мм.