

Text_kursovoy_raboty (1)
.docxМинистерство образования и науки Российской Федерации
КАЗАНСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ имени
А. Н. ТУПОЛЕВА - КАИ
Кафедра автоматики и управления
Пояснительная записка к курсовой работе
по дисциплине «Информационные технологии»
на тему
Колебания маятника
Выполнила студентка группы 3139______________ Иванов А. С.
(подпись) (Фамилия И.О.)
Руководитель _______________ ______________
(должность, подпись) (Фамилия И.О.)
Оценка ____________
___________ ______________
(подпись) (Фамилия И.О.)
Казань, 2014
Оглавление
dt 9
#include <vc1. h> 9
#include "math.h" 10
4.1 назначение программы 0
ВВедение
Колеба́ния — повторяющийся в той или иной степени во времени процесс изменения состояний системы около точки равновесия. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку.
Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую форму. Колебания различной физической природы имеют много общих закономерностей и тесно взаимосвязаны c волнами. Поэтому исследованиями этих закономерностей занимается обобщённая теория колебаний и волн. Принципиальное отличие от волн: при колебаниях не происходит переноса энергии, это, так сказать, «местные» преобразования
1. Постановка задачи
Дано: математический маятник. Требуется смоделировать колебания маятника с помощью языка С++
2МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Нам требуется получить уравнения движения данной системы. Воспользу-
емся для этого уравнением Лагранжа 2-го рода[1]:

Запишем выражение для кинетической энергии 1-го маятника:
где
![]() .
Выражение для кинетической энергии
маятника (воспользовавшись теоремой о
кинетической энергии тела при
плоскопараллельном движении):
.
Выражение для кинетической энергии
маятника (воспользовавшись теоремой о
кинетической энергии тела при
плоскопараллельном движении):
Выражение
для потенциальной энергии маятника:![]()
![]()
Итого,
выражения для потенциальной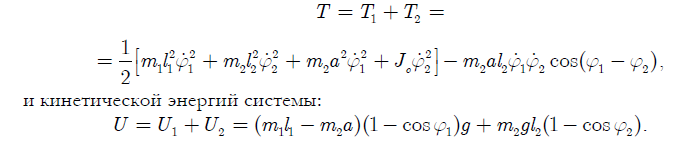
Подставив выражения для кинетической (2.6) и потенциальной (2.7) энер-
гий системы в уравнения Лагранжа (2.1), получим уравнения движения системы:

Полученная система (2.8) представляет собой систему двух связанных
обыкновенных нелинейных дифференциальных уравнения 2-го порядка отно-
сительно неизвестных 1ϕ (t) и 2ϕ (t).
Постановку задачи также необходимо дополнить начальными условиями:
1 Кинетическая энергия тела при его плоскопараллельном движении равна сумме тех кинетических энергий,
которые имело бы данное тело при его поступательном движении со скоростью центра масс тела и при его
вращательном движении вокруг оси, проходящей через центр масс тела и перпендикулярной к той непод-
вижной плоскости, параллельно которой движется тело[2].

Также, представляет интерес рассмотреть малые колебания системы без
трения. Получить уравнения движения в этом случае можно из системы (2.8)
положив равными 0 все нелинейные члены, косинус малого угла равным 1, а
синус малого угла равным самому углу. Тогда получим уравнения малых
колебаний данной системы (запишем их в матричной форме):

которые также следует дополнить начальными условиями (2.9).
В результате выполнения работы, мы должны:
1) решить поставленную задачу в линейной постановке, определить
собственные частоты и формы колебаний системы;
2) решить численно поставленную задачу в общей постановке без трения,
получить анимацию процесса колебаний;
3) смоделировать процесс колебаний без трения используя CAD/CAE сис-
темы, получить анимацию;
4) подобрать параметры системы так, чтобы более ярко выразить ее хаоти-
ческое поведение.
3 МЕТОДИКА РЕШЕНИЯ ЗАДАЧИ
3.1 Задача о малых колебаниях
Сначала решим задачу о малых колебаниях (2.9),(2.10), как самую простую
и имеющую аналитическое решение. В результате решения, мы должны полу-
чить собственные частоты и формы системы, а также зависимости ϕ1(t) и 2ϕ (t).
Введем обозначения:

Тогда уравнение движения запишется в виде:
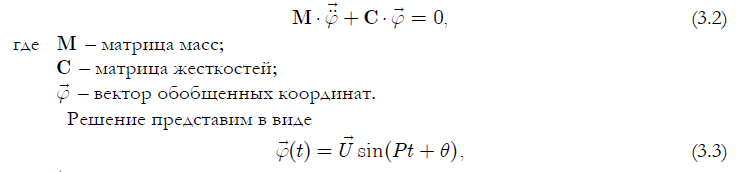
где U, P,θ – некоторые константы, подлежащие отысканию. Подставим решение (3.3) в уравнение (3.2). После приведения получим:
![]()
Эта
система имеет решения только если
![]() Запишем
это условие в развернутом виде:
Запишем
это условие в развернутом виде:
Раскрыв определитель, получаем биквадратное уравнение относительно P :
Обозначив

получим
Выражение (3.8) представляет собой значение первой и второй собствен-
ных частот системы. Подставим каждую из полученных собственных частот (3.8)
в уравнение форм колебаний (3.4):
![]()
Отсюда получаем собственные формы колебаний с точностью до постоянного множителя:
Решение задачи возьмем в виде разложения по собственным формам:

Неопределенные константы 11 12 21 22 C11 ,C12 ,C21 ,C22 находим из начальных условий (2.9)
Таким образом, задача о малых колебаниях решена.
МОДЕЛВРОВАНИЕ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ НA ПРИMEPE МАТЕМАТИЧЕСКОГО МАЯТНИКА В СРЕДЕ С++ BUILDER
Основой физического образования является физический эксперимент и фундаментальная теория. После освоения техники и методов реального физического экспериментирования в учебных лабораториях (практические действия с материальными обьектами, измерительными приборами и т.д.) студенты физико — математических факультетов ( а также многих технических) могут перейти к исследованию компьютерных (виртуальных) моделей физических явлений, эффектов и процессов взаимодействия, развивая свое предметно - образное мышление и осваивая методы исследовательской деятельности.
Если тело
совершает
свободные
незатухающие
колебания, то
его координата
с течением
времени изменяется
по закону
косинуса или
синуса![]()
где
![]() —
амплитуда
—
амплитуда![]() фаза
колебаний,
фаза
колебаний,
![]() — начальная
фаза,
— начальная
фаза,
![]() —собственная
циклическая
(круговая) частота
колебаний.
Скорость (первая
производная координаты
по времени)
и ускорение
(вторая производная
координаты
повремени) при
этом также
будут изменяться
по гармоническому
закону:
—собственная
циклическая
(круговая) частота
колебаний.
Скорость (первая
производная координаты
по времени)
и ускорение
(вторая производная
координаты
повремени) при
этом также
будут изменяться
по гармоническому
закону:

dt

а ![]()
Для преобразования
выражений мы
воспользовались
формулами
приведения. Отсюда
видно, что
скорость опережает
смещение по
фазе на
![]() а
ускорение -
на т,
т.е. находится
в
противофазе
со
смещением.
Одной
из
самых
простых
и
распространенных
моделей
колебательных
систем является
математический
маятник:
материальная
точка массы т,
подвешенная
на нерастяжимой
нити длиной
и совершающая
колебания в
вертикальной
плоскости.
Круговая частота
колебаний в
этом случае
принимается
равной
а
ускорение -
на т,
т.е. находится
в
противофазе
со
смещением.
Одной
из
самых
простых
и
распространенных
моделей
колебательных
систем является
математический
маятник:
материальная
точка массы т,
подвешенная
на нерастяжимой
нити длиной
и совершающая
колебания в
вертикальной
плоскости.
Круговая частота
колебаний в
этом случае
принимается
равной

Цель настоящей работы заключается в том, чтобы построить графики зависимости х(/), v(/), а(/) и проследить за их изменением при изменении параметров системы в среде C++Builder.
Загрузка файла.
1. Запустить C++Builder..
2.Открыть шаблон Форма 1 Свободные колебания математического маятника. cpp.
Очевидно,
исходными
данными являются.
1)
амплитуда
(максимальное
смещение)![]()
2) начальная фаза ‹р , 3) длина нити Z,4) временной интервал. Постоянные величины. амплитуда, начальная фаза, длина нити, период (частота) колебаний. Переменные — смещение тела в каждый момент времени (координата х), скорость и время.
Программа в среде С++ Builder:
Список литературы:
1. Стародубцев В.А. Использование информационных технологии на лекциях по естественнонаучным дисциплинам. Информатика и образование. 2003.
2. Кравченко Н.С., Ревинская О.Г. Изучение основных законов механики с помощью моделирующих лабораторных работ на компьютере. Материалы XV Международной конференции «Применение новых технологии в образовании». Троицк. Тровант, 2004.
текст программы
#include <vc1. h>
#pragma hdrstop
#include "Unit 1.h"
#include "math.h"
#pragma package(smart_init)
#pragma resource "*.dfm" TForm l *Form l ; Graphics..TBitmap *bgp,
fastcall TForm I::TForm I(TComponent* Owner) TForm(Owner)
bgp=new Graphics:: TBitmap0:
bgp->LoadFromFile("sky. bmp"); catch(EFOpenError &e)
void fastcall TForml::FormPaint(TObject *Sender)
Canvas—>Draw(0,0,bgp); Canvas—>Bmsh->Style=bsClear;
void fastcall TForml::FormResize(TObject *Sender)
Form I ->Refresh();
void fastcall TForml::Button1Click(TObject *Sender)
double t,x,v,a,xmax=0.3,tmax=l 0.0;
double L=l,p=3. 14159265358979;
double g=9.80665,w=sqrt( L),T=2*p/w,f=p/6; ro o;
while (t< max)
x max*sin(w*t+I);
*xmax*cos(w*t+I); a=—w*w*xmax*sin(w*t+I ); Senesl ->AddXY(t,x,"",clBlue); Series2->AddXY(t,v,"",clGreen); Series3—>AddXY(t,a,"",c1Red);
4.1 назначение программы
Программа предназначена для моделирования колебания маятника
4.2. Исходные параметры программы
1)амплитуда (максимальное смещение) хmax
2)начальная фаза φ
3)длинна нити L
4)Временной интервал
4.5 Выходные данные
1)Период Т
2)Скорость ν
3)Ускорение а