

§1.2. Режим реального времени
В ряде применений вычислительных систем (напр. управление воздушным движением и т.п.) на обработку вводимых данных и выдачу результата накладываются жесткие временные ограничения, диктуемые темпом процессов в управляемом объекте. Такие системы работают в реальном масштабе времени.
Такая система соединена с некоторым внешним объектом и обрабатывает поступающую в нее информацию о его состоянии достаточно быстро для того, чтобы результат обработки мог использоваться для воздействия на процесс в объекте.
Общая схема такой системы показана на рисунке 1.3.
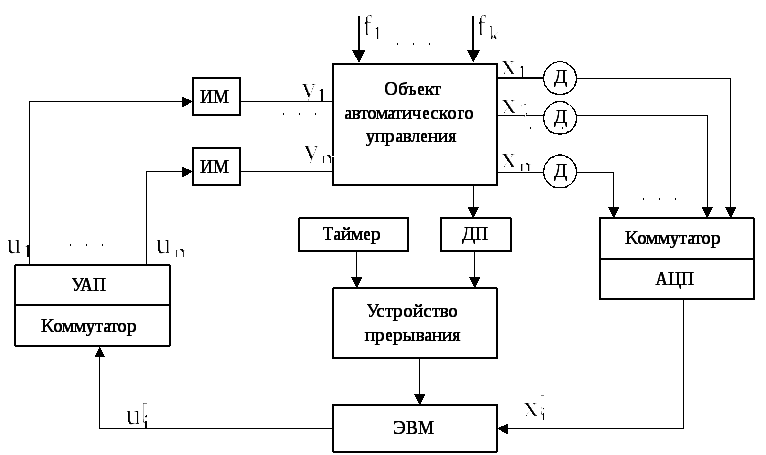
Рисунок 1.3.
На рисунке 3 обозначены:
{xi} – измеряемые параметры:
{yi} – регулируемые параметры;
{fi} – нерегулируемые и неизменяемые параметры (изменяющиеся со временем характеристики оборудования, шумы и т. п.);
Д – датчики;
ИМ – исполнительный механизм;
АЦП – аналоговый цифровой преобразователь;
ЦАП – цифро-аналоговый преобразователь;
ДП – датчик прерывания.
На вход ЭВМ от датчика поступает измерительная информация о текущих значениях параметров x1 … xn. Цифровой вычислительный комплекс вырабатывает управляющие воздействия u1 … um, для изменения регулируемых параметров y1 … ym с тем, чтобы управляемый процесс протекал оптимальным образом.
Датчики обычно выдают сигнал в аналоговой форме. Управляющие воздействия {ui} также должны быть в аналоговой форме. Преобразования выполняют АЦП и ЦАП. Для уменьшения оборудования АЦП и ЦАП выполняются многоканальными. С помощью коммутатора преобразователь поочередно подключается к каждому датчику и осуществляет преобразование. Аналогично производится преобразование управляющих воздействий. Это управляющее воздействие аналоговое, например, напряжение. Оно фиксируется в данной цепи, то есть сохраняется неизменным до следующего цикла управляющего воздействия. Наибольшее распространение получил синхронный принцип связи, при котором процесс управления разбивается на циклы равной продолжительности, тактируемые таймером.
В ряде случаев необходима более тесная связь объекта с УВК. Тогда используется асинхронный способ связи. Вместо тактируемых сигналов в УВК поступают сигналы от датчиков прерывания, непосредственно связанных с объектом (например, конечных выключателей, датчиков аварийного состояния и т.д.).
Глава 2. Вычислительные системы §2.1. Классификация вс.
Вычислительные системы (ВС) – совокупность взаимосвязанных и согласованно действующих однотипных или не однотипных ЭВМ или процессоров и других устройств, обеспечивающих автоматизацию приема, обработки и выдачи информации потребителям. ВС представляет собой логическое следствие эволюции двух общих тенденций, проявляющихся при создании ЭВМ: стремления к модульной конструкции и стремления к организации параллельной работы различных устройств машины. ВС относятся к категории сложных систем. Сложные системы характеризуются следующими чертами:
наличие единой цели функции для всей системы;
сложность реализуемой функции;
большое количество взаимосвязанных элементов;
возможность деления системы на подсистему;
иерархия связей подсистем и иерархия критериев качества;
наличие взаимодействия с внешней средой и функционирование в условиях воздействия случайных факторов;
наличие управления в системе и высокая степень его автоматизации;
устойчивость к внутренним и внешним возмущающим факторам;
надежность системы.
Одной из характерных черт сложных систем и вычислительных систем, в частности, является отсутствие единого критерия эффективности системы и наличия нескольких более или менее равнозначных критериев.
Современные ВС строятся на основе использования принципов параллельной обработки, то есть как параллельные системы. Цель такого режима – увеличить эффективность использования оборудования, свести к минимуму время решения и представить максимум удобств. При проектировании и эксплуатации ВС возникает ряд вопросов от решения, которых зависит эффективность системы. Основными из них являются:
Выбор оптимальной структуры ВС.
Оптимальное с точки зрения производительности распределение программ (частей) в системе.
Оптимальное распараллеливание алгоритмов.
Организация мультипрограммного режима работы.
Определение оптимального уровня централизации (при полной централизации недостаток – передача значительных массивов информации при обмене; при децентрализации недостаток – снижение качества управления за счет неполных сведений о состоянии элементов системы).
6. Оптимальное распределение и защита памяти.
Классификация ВС.
Существует множество классификаций вычислительных систем. Приведем некоторые из них.
По назначению ВС делятся на универсальные и специализированные.
По числу машин или процессоров принята классификация на одномашинные (однопроцессорные) и многомашинные (многопроцессорные).
По типу ЭВМ (процессоров) делятся на однородные и неоднородные.
По степени территориальной разобщенности принята классификация на ВС совмещенного и разобщенного типов. В разобщенной ВС информация по каналам к абонентам передается последующими кодами. Отсюда ясен недостаток.
По постоянству структуры рассматривают ВС с постоянной и переменной структурой. Система относится к типу ВС с постоянной структурой, если состав функциональных и управляющих связей и их ориентация остаются неизменными.
По степеням централизации управления ВС классифицируют на централизованные, децентрализованные и смешенные типы. В децентрализованной системе управление иерархично, то есть существует несколько уровней управления.
По временному режиму существуют ВС, работающие в оперативном и неоперативном временных режимах. Оперативный режим соответствует работе в реальном масштабе времени.