


Глава 13.
НАВИГАЦИОННЫЕ ГИДРОАКУСТИЧЕСКИЕ СИСТЕМЫ ДАЛЬНЕГО ДЕЙСТВИЯ
Явление сверхдальнего распространения звука в океане, в так называемом подводном звуковом канале, широко используется в практических целях и, в частности, в интересах кораблевождения, при создании навигационных гидроакустических систем (НГС), а также спасательными службами для определения местоположения кораблей, терпящих бедствие.
§ 13.1. ФИЗИЧЕСКИЕ ОСНОВЫ НАВИГАЦИОННЫХ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ ДАЛЬНЕГО ДЕЙСТВИЯ
Создание НГС дальнего действия основано на знании условий распространения звука в подводном звуковом канале.
Подводный звуковой канал можно определить как слой в толще воды, в пределах которого звуковые лучи распространяются, испытывая многократное внутреннее отражение. При этом звуковая энергия концентрируется вдоль оси канала, что создает условия сверхдальнего распространения звука.
Для возникновения подводного звукового канала необходимо такое распределение скорости звука, при котором отрицательный градиент скорости звука в верхних слоях переходит в положительный градиент в нижних, т. е. когда на некоторой глубине имеется минимум скорости звука (рис. 13.1).
За верхнюю и нижнюю границы канала принимаются глубины с одинаковой скоростью звука, а толщина его определяется как разность между глубинами этих границ.
Осью звукового канала считается глубина, на которой скорость звука минимальна. Ось канала может быть горизонтальной или при очень больших расстояниях отклоняться от горизонтальной линии в зависимости от гидрологических условий в различных районах моря или океана. Как известно, распространение звуковых колебаний в морской воде— сложное явление. Скорость звука зависит от температуры, солености воды и гидростатического давления.
Температура в большей степени, чем другие факторы влияет на скорость звука. Так, например, при начальной температуре воды 12° С изменение скорости звука с изменением температуры на 1°С равно 3,5 м/с. При понижении температуры это изменение возрастает и при 0°С оно равно 4,4 м/с, а при повышении — уменьшается и при 30° С становится равным 2,1 м/с.
Соленость воды влияет на скорость звука значительно меньше, чем температура. Увеличение солености на 1%0 вызывает увеличение скорости звука на 0,083%, что при скорости звука 1450 м/с составляет 1,2 м/с.
При повышении давления скорость звука растет. По опытным данным изменение скорости звука равно 0,0175 м/с на 1 м глубины.
На практике скорость звука в воде определяется по эмпирическим формулам, из которых наибольшее распространение в настоящее время получили известные формулы Дель-Гроссо и Д. Вильсона, обеспечивающие наименьшие ошибки.

Из анализа вертикального распределения температуры воды в океанах следует, что температура воды в верхних слоях обычно уменьшается, а затем, начиная с некоторого горизонта, остается практически неизменной до самого дна.
Вертикальное же распределение солености характеризуется слабым возрастанием солености с глубиной.
Таким образом, на изменение скорости звука с глубиной наиболее существенное влияние оказывает в верхнем слое толщиной несколько сот метров, где наблюдается значительный вертикальный градиент температуры,— температура воды, а в нижних слоях, где вертикальный градиент температуры близок к нулю,— гидростатическое давление.
Изменение солености с глубиной не оказывает существенного влияния на изменение скорости зву-
ка.
В связи с этим в океанах скорость звука сначала убывает в соответствии с уменьшением температуры воды и достигает минимума на глубине, где вертикальный градиент температуры становится близким к нулю. Далее скорость звука возрастает до самого дна благодаря увеличению гидростатического давления, поскольку в этом случае температура и соленость не будут изменяться с глубиной. Такая картина изменения скорости звука типична для случая образования глубинного подводного звукового канала.
Ход звуковых лучей в подводном звуковом канале зависит от величины угла а°, под которым данный луч выходит от источника звука. Этот угол а°, образуемый направлением выходящего луча и горизонтальной прямой, проходящей через источник звука, называется углом выхода или углом скольжения.
Каждому углу скольжения а° соответствует свой луч. При этом чем больше угол скольжения, тем дальше отклоняется соответствующий ему луч от оси канала. Располагая источник звука на оси канала, всегда будем иметь некоторое количество лучей, выходящих под малыми углами к оси канала, которые пройдут путь до приемника, не претерпевая отражений ни от дна, ни от поверхности моря. Отклоняясь вверх и вниз, эти лучи всегда остаются в пределах толщины канала (рис. 13.2).
Лучи, которые испытывают полное внутреннее отражение на границах канала, называются предельными. Лучи, вышедшие от источника под углами меньше предельного и распространяющиеся в толще канала, называются канализируемыми. Они несут в себе значительную долю энергии по сравнению с лучами, достигающими дна и поверхности моря и отражающимися от последних, так как при каждом отражении значительная часть энергии поглощается или рассеивается.
Лучи, вышедшие из источника звука под нулевым углом скольжения, распространяются вдоль оси канала. Лучи, вышедшие под углами больше предельного угла и испытывающие отражение от дна и поверхности моря, называются отраженными лучами.
Лучи, распространяющиеся в звуковом канале, тем чаще пересекают ось канала, чем меньше угол выхода их от источника звука. При этом чем чаще луч пересекает ось канала, тем больше он делает «повторений» или «циклов» на пути своего распространения.
Скорость распространения звука в канале различна для разных лучей и зависит от угла выхода этих лучей. Чем больше угол выхода, тем больше средняя скорость распространения звука вдоль этого луча. Наименьшая скорость распространения наблюдается для луча, распространяющегося вдоль оси канала, т. е. имеющего угол выхода а°=0°. Поэтому звук, вышедший одновременно от излучателя под

разными углами а° и распространяющийся в пределах канала, поступит на приемник прежде всего с направлений тех лучей, которые имеют наибольший угол выхода а0, несмотря на то, что путь его вдоль этих лучей является наибольшим. Последним поступит на приемник звук, распространяющийся вдоль оси канала, хотя проходит он наименьшее расстояние.
В теории звукового канала показано, что для несколько идеализированного канала, когда принимается линейный закон увеличения скорости звука с глубиной, время пробега tN звука от излучателя до приемника по каждому из канализируемых лучей приближенно может быть определено из следующего выражения:
|
D |
|
|
α |
2 |
D |
2 |
|
|
tN = |
|
− |
|
|
|
|
|||
|
|
|
|
2 |
|
||||
|
1 |
24N |
|
(13.1) |
|||||
|
c0 |
|
|
|
|||||
где D — расстояние между излучателем и приемником, м; с0 — скорость звука на оси канала, м/с;
α — относительное изменение скорости звука с глубиной, т. е. отношение градиента скорости звука к скорости звука на оси канала;
N— число циклов данного луча на расстоянии D.
Из формулы (13.1) следует, что наибольшее время пробега будет для звука, распространяющегося вдоль оси канала, так как число его циклов N стремится к бесконечности. Это время пробега будет
tN →∞ = D c0
Таким образом, к точке приема сигнала поступают звуковые лучи, прошедшие различными траекториями и, налагаясь, создают растягивание импульса, т. е. увеличивается промежуток времени между первым и последним зарегистрированными сигналами, прошедшими по различным траекториям.
В табл. 13.1 приведено время опережения в секундах для лучей, вышедших под углом скольжения а° относительно луча, распространяющегося вдоль оси канала для различных расстояний от излучателя.
Таблица 13.1
а0 |
|
Расстояние, км |
|
|
|
50 |
100 |
500 |
1000 |
|
|
|
|
|
2 |
0,002 |
0,040 |
0,20 |
0,40 |
6 |
0,028 |
0,056 |
0,28 |
0,56 |
10 |
0,075 |
0,150 |
0,75 |
1,50 |
20 |
0,720 |
1,440 |
7,20 |
14,40 |
30 |
1,700 |
3,400 |
17,00 |
34,00 |
|
|
|
|
|
В общем случае разницу во времени прихода первого и последнего луча, или так называемое время затягивания τ3, можно выразить формулой
|
= tN →∞ −tN min = |
D |
|
aD |
2 |
aDh |
||
τ3 |
|
|
|
|
≈ |
|
(13.2) |
|
24c0 |
|
|
||||||
|
|
|
N min |
|
3c0 |
|||
где h — глубина от оси канала до дна, м.
Из формулы (13.2) видно, что время затягивания звукового импульса т3 растет пропорционально расстоянию D между излучателем и приемником. Это обстоятельство может быть использовано для определения расстояния между излучателем и приемником.
Глубина залегания оси подводного звукового канала в различных районах неодинакова и связана с характером вертикального изменения температуры воды.
ВАтлантическом океане глубина залегания оси подводного звукового канала возрастает от 600— 800 м в северной его части до 1300—1500 м в районе тропиков. К экватору глубина залегания оси канала уменьшается до 600 м, а затем возрастает в южной тропической зоне до 900— 1000 м. К южному полярному району глубина залегания оси канала вновь уменьшается до 100—200 м.
ВТихом океане отмечается картина распределения глубин залегания оси подводного звукового канала, близкая к описанной выше для Атлантического океана. В полярных районах обоих полушарий глубина залегания канала расположена на горизонтах около 100 м; возрастая к тропикам до 800—1000 м, она сохраняется в этих пределах и в экваториальной зоне.
ВИндийском океане глубина залегания оси подводного звукового канала составляет примерно

100 м в южном полярном районе, возрастая до 1500 м в северных его частях.
Вследствие малых годовых колебаний температуры воды на больших глубинах приведенные глубины залегания оси подводного звукового канала не будут существенно изменяться в течение года так же, как не будут изменяться и абсолютные значения скорости звука на оси канала.
Поскольку температура воды на оси подводного звукового канала в различных районах океанов неодинакова, то и скорость звука будет различна. Так, например, скорость звука на оси канала может изменяться от 1450—1460 м/с в полярных районах, до 1480—1490 м/с в тропических и экваториальных районах.
Подводный звуковой канал в океанах — это глубинный стационарный канал, который существует в течение всего года.
Следует сказать и о приповерхностном звуковом канале. В определенные сезоны в отдельных районах океанов и морей создаются гидрологические условия, при которых возникает канал с глубиной погружения его оси в несколько десятков метров. Происходит это в тех случаях, когда наблюдается вертикальное распределение температуры, аналогичное распределению температуры при образовании глубоководного звукового канала, т. е. при наличии минимума температуры на какой-то глубине.
Приповерхностный подводный звуковой канал в отличие от глубинного менее устойчив. Он наблюдается обычно только в теплое время года и занимает ограниченные площади. В наиболее теплые месяцы глубина залегания оси канала может достигать 30—40 и даже 100—120 м. Осенью, с началом зимнего охлаждения воды, канал исчезает. В морях с приливами и относительно мелководных морях сезонный канал неустойчив даже летом.
В заключение рассмотрим особенности распространения звука в арктических морях. В арктических районах Мирового океана ось подводного звукового канала находится вблизи или непосредственно у покрытой льдом поверхности. Звук распространяется на значительные расстояния путем многократных отражений от нижней поверхности льда, к которой лучи возвращаются вследствие положительной рефракции.
Комбинация положительной рефракции лучей с отражением вниз от неровной поверхности льда создает под ледовым покровом ряд уникальных эффектов. Одна из характерных особенностей заключается в том, что распространение звука в Арктике аналогично прохождению сигнала через полосовой фильтр. В этом районе как высокие, так и низкие частоты быстро затухают, первые из-за потерь при отражении от ледового покрова, а вторые — вследствие слабого захватывания низких частот звуковым каналом.
Установлено, что в арктических морях лучше всего распространяется звуковой сигнал в полосе частот приблизительно от 15 до 30 Гц. Результаты зарубежных исследований свидетельствуют о быстром затухании сигналов при увеличении частоты выше 30 Гц, а также о возрастании потерь на частоте 10 Гц (нижний предел диапазона), по сравнению с потерями на частоте 20 Гц. В пределах полосы пропускания имеет место дисперсия звука.
Взрывные и тональные источники звука
Подводные взрывы широко используются в качестве источников .звука в навигации, геофизике, связи и т. д. Взрывы создают весьма короткие импульсы звука большой мощности и способны заменить дорогостоящие генераторы. Взрывной источник звука может быть использован на любых глубинах и обладает достаточно высоким КПД (порядка 50%).
Взрыв — это процесс, при котором некоторое количество взрывного вещества в короткий промежуток времени превращается в газ с очень высокой температурой (около 3000° С) и давлением порядка 150 тыс. атм. Детонирующее вещество создает ударную волну, для которой характерны чрезвычайно крутой передний фронт, значительный пик давления и высокая скорость затухания.
Использование точечных источников звука, которые получаются в результате подрыва заряда тринитротолуола, представляет большой практический интерес, поскольку они дают мощный звуковой импульс с энергией, распределенной в широкой полосе частот.
По результатам, полученным при взрыве заряда на оси звукового канала, для коэффициента поглощения акустических колебаний в диапазоне частот от 20 Гц до 60 кГц выведена следующая форму-
ла: |
3 |
|
дБ |
(13.3) |
|
β = 0,033 |
2 |
||||
|
км |
||||
|
|
|
Поскольку коэффициент затухания р, определяющий убывание интенсивности звука с расстояни-
ем за счет его поглощения при распространении в звуковом канале, как это следует из формулы (13.3), растет пропорционально частоте в степени 3/2, то для ультразвуковых колебаний следует ожидать значительно меньших дальностей распространения в канале по сравнению со звуковыми колебаниями.
Если взрывной источник помещен на оси звукового канала, то наблюдаются весьма большие дальности распространения звука. Так, например, по наблюдениям в Атлантическом океане, взрыв заряда массой 0,25 кг хорошо прослушивался на расстоянии около 1500 км, а заряда массой 2,7 кг — на расстоянии до 5750 км. Приемное устройство во всех этих случаях также находилось строго на оси звукового канала.
Для генерирования акустической энергии при создании источников звука в фокусах навигационных гидроакустических систем (НГС) используются также различные тональные излучатели — подводные звуковые маяки. Излучатели этих маяков электромагнитного типа устанавливаются на определенном удалении от берега на глубине залегания подводного звукового канала и питаются по кабелю с береговых станций. Возможно подвешивание и с кораблей излучателей, устанавливаемых в фокусах НГС. Взрывные и тональные источники звука обладают недостатками и несомненными достоинствами.
К числу преимуществ взрывных источников относится их мобильность, возможность создания источника звука на любой глубине и практически любой мощности, а также широкополосность сигнала и ненаправленность излучения.
Среди недостатков взрывных источников звука следует отметить невозможность частой их повторяемости, а также то обстоятельство, что комбинация высокой мощности и ненаправленности излучения создает значительный реверберационный фон.
§ 13.2. ПРИНЦИП ДЕЙСТВИЯ НАВИГАЦИОННЫХ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ ДАЛЬНЕГО ДЕЙСТВИЯ
Принцип действия навигационной гидроакустической системы дальнего действия основан на измерении времени прохождения звуковых сигналов от источников излучения до приемного корабельного устройства.
При этом необходимо отметить, что наибольшие дальности действия НГС будут в том случае, когда излучатель и приемник находятся на оси подводного звукового канала или вблизи него. С увеличением расстояния источника звука или места приема от оси канала число канализируемых лучей уменьшается, а следовательно, уменьшается интенсивность сигнала.
По скорости звука на оси звукового канала и времени прохождения сигнала от излучателя до приемного устройства рассчитывается расстояние до точек (фокусов) излучения по формуле
D = c0t |
(13.4) |
|
где D — расстояние до точек излучения, м;
со — скорость звука на оси звукового канала, м/с;
t — время прохождения звукового сигнала от излучателя до приемника, с.
Таким образом, видим, что навигационная гидроакустическая система дальнего действия является дальномерной системой.
Естественно, что для определения места корабля необходимо знать координаты точек (фокусов) излучения звуковых сигналов и точное время их подачи. В качестве источников звука могут использоваться тональные излучатели или взрывные источники.
Для определения момента приема луча звукового импульса, распространяющегося по оси подводного звукового канала, используются рассмотренные выше особенности распространения звука в зоне канала, а именно, тот факт, что первыми в точку приема приходят предельные лучи, которые, хотя и проходят больший путь, однако распространяются в слоях с большой скоростью звука. Последним в точку приема приходит луч, распространяющийся по оси канала, поскольку скорость на оси канала наименьшая.
Таким образом, интенсивность принимаемого импульса сначала увеличивается медленно, образуя размытый передний фронт, а затем, после достижения некоторого максимального значения, которое соответствует моменту прихода луча, распространяющегося по оси канала, интенсивность сигнала резко падает (за 0,1—0,05 с). Однако необходимо отметить, что на больших удалениях наблюдается размытость и заднего фронта. Это обстоятельство затрудняет определение момента прихода луча, распространяющегося по оси канала. Кроме того, могут приниматься лучи, отраженные от дна, но на близких расстояниях они воспринимаются как реверберация, а на больших расстояниях приходят очень ослаб-
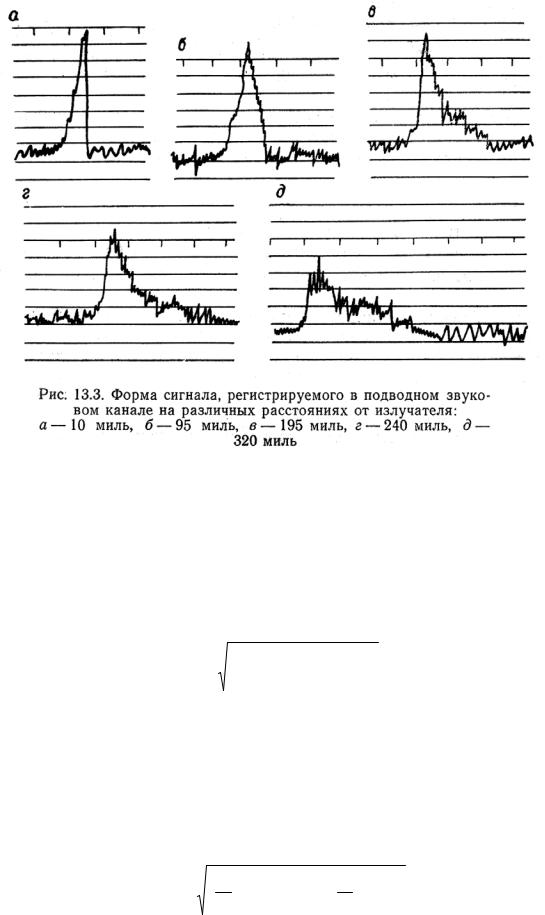
ленными.
Форма сигнала, регистрируемого в подводном звуковом канале на различных расстояниях от излучателя, показана на рис. 13.3.
Можно заранее подготовить карты на район плавания, на которые нанести систему окружностей, центрами которых будут места (фокусы) излучения звуковых сигналов, а радиусами — расстояния, проходимые сигналом за определенное время.
При определении места с помощью навигационной гидроакустической системы погрешность в линии положения складывается из погрешности, возникающей вследствие неточного знания скорости распространения звука в подводном звуковом канале, и погрешности, возникающей за счет неточного фиксирования времени в момент подачи сигнала и при приеме его на корабле.
Скорость распространения звука на оси подводного звукового канала невозможно определить точно из-за погрешностей, допускаемых при расчете скорости по эмпирическим формулам, а также из-за несоответствия принятых при расчетах исходных данных фактическим в момент использования НГС.
В общем случае погрешность в определении линии положения в м выражается формулой
M Л.П. = |
|
D |
|
2 |
+ mф |
|
|
mc |
+ (c0 mt ) |
|
|||
|
|
|
|
|
|
(13.5) |
|
c0 |
|
|
|
|
|
где МЛ.П. — погрешность в определении линии положения, м; D — расстояние до излучателя, м;
с0 — скорость звука на оси подводного звукового канала, м/с; mc — средняя квадратическая погрешность скорости звука, м/с;
mt — средняя квадратическая погрешность во времени выдачи сигнала и приема его на корабле, с; mф — средняя квадратическая погрешность местоположения фокуса излучения, м.
На больших удалениях от фокусов излучения звуковых сигналов, т. е. в тех случаях, когда наблюдается, как указывалось выше, размытость переднего и заднего фронтов сигнала и отсутствует возможность определения момента прихода звукового сигнала, распространяющегося по оси подводного звукового канала, формула (13.5) примет вид
|
|
D |
2 |
2 |
|
t p 2 |
2 |
|
|
M Л.П. = |
|
|
|
+ с0 |
|
|
|
+ mф |
(13.6) |
|
|
mc |
mt + |
4 |
|
||||
|
c0 |
|
|
|
|
|
|
||
где tp — время растягивания сигнала, с.
При создании НГС дальнего действия фокусы излучения звука должны быть вынесены в море от береговой черты на такое расстояние, чтобы исключить влияние прибрежного рельефа на распространение звука. Наиболее оптимальным является размещение фокусов на материковом склоне дна. В рабочем секторе излучателя не должно быть каких-либо препятствий и подъемов дна, которые могут привести к образованию теневых зон в нужных направлениях.
Подача звуковых сигналов в фокусах НГС дальнего действия должна производиться в точно установленное время. Для опознания на корабле фокуса, от которого принят звуковой сигнал, они подаются сериями.
Для определения расстояния до излучателей также может быть использована рассмотренная выше зависимость длительности звучания сигнала в точке приема от дистанции; это дает возможность по длительности звучания сигналов от взрывных источников звука приближенно определить расстояние до них.
По данным американских авторов, на основании опытов, проведенных в Атлантическом океане, расстояние от места излучения звука связано с продолжительностью звучания в точке приема следующей формулой:
D =100τ3c0 |
(13.8) |
где D — расстояние от места излучения звука до точки приема, м; |
|
τ3 — продолжительность звучания сигнала, с; с0 — скорость звука на оси звукового канала, м/с.
Зная особенности распространения звука в звуковом канале, можно решить и задачу определения координат источника звука, если принять сигнал не менее чем в двух точках и по продолжительности его определить расстояние до фокуса излучения. Однако, как показывают расчеты, точность определения места источника звука таким способом очень невелика, и погрешности могут достигать на расстоянии до 500 км нескольких десятков километров.
Для определения места источника звука по времени прихода сигнала можно использовать разность времени прихода звука к нескольким парам точек приема (минимум к двум), из которых одна может быть общей. В этом случае пользуются вместо сетки окружностей сеткой гипербол. Точность определения места излучения этим способом достаточно высока, и погрешность может достигать 1 км на расстоянии порядка 500 км.
Рассмотренные способы определения места источников звука при использовании явления сверхдальнего распространения звука в подводном звуковом канале используются спасательной службой США в системе «Сафар» в Тихом и Атлантическом океанах.
Суть этой системы заключается в следующем. Приемные станции установлены на материковом склоне на глубине залегания подводного звукового канала. Корабли и самолеты, курсирующие на Тихом и Атлантическом океанах, снабжаются специальными бомбами массой в 1 кг. В случае бедствия бомба сбрасывается за борт и автоматически взрывается, погрузившись на глубину залегания оси подводного звукового канала.
Место взрыва определяется с высокой точностью по разности времени прихода звука на береговые приемные посты, что обеспечивает быстрое определение координат терпящего бедствие корабля или самолета.