

Контрольные вопросы
Какие виды трения существуют и чем они различаются?
Чем определяется сила трения покоя?
Чему равен коэффициент трения скольжения, коэффициент трения качения?
Что такое сила нормального давления? Чему она равна при движении тела по наклонной плоскости?
Как находят силу трения в данной работе?
Чему равна работа, совершенная силой трения в течение n колебаний?
Чему равно изменение потенциальной энергии образца, произошедшее в результате n колебаний?
Выведите формулы (13.9) и (13.13).
Приведите случаи полезного и вредного влияния сил трения.
Литература
1. Савельев И.В. Курс физики. Т. 1, – М.: Наука,1989. С. 56–79.
Трофимова Т.И. Курс физики. – М.: Высш. шк., 2001. С. 14–27.
Работа 1.14
Изучение зависимости момента инерции тела от распределения его массы относительно оси вращения
Цель работы: 1) расчет момента инерции тела правильной формы относительно одной из главных осей инерции; 2) определение моментов инерции тела относительно других осей вращения (указанных преподавателем); 3) определение модуля кручения проволоки подвеса.
Приборы и принадлежности: унифилярный подвес, исследуемые тела, секундомер, штангенциркуль.
Свободные оси вращения. Главные оси инерции
В данной работе рассматривается вращение твердого тела вокруг неподвижной оси (рис. 14.1). При таком движении все точки тела движутся в параллельных плоскостях по концентрическим окружностям, центры которых лежат на одной прямой, называемой осью вращения ОО(рис. 14.1).
Основной закон динамики для тела, вращающегося относительно неподвижной оси, записывается в виде
![]() ,
(14.1)
,
(14.1)
где
![]() – результирующий момент всех внешних
сил,
– результирующий момент всех внешних
сил,![]() – момент инерции тела относительно оси
вращения,
– момент инерции тела относительно оси
вращения,![]() –угловое ускорение тела.
–угловое ускорение тела.
Момент инерции тела относительно оси его вращения может быть определен по формулам (Т.10) или (Т. 11):
![]() ,
,
![]() ,
(14.2)
,
(14.2)
где
![]() – масса малого объема тела, все
точки которого можно считать удаленными
от оси вращения на одинаковое расстояние
– масса малого объема тела, все
точки которого можно считать удаленными
от оси вращения на одинаковое расстояние
![]() ,
,![]() – элементарная масса,V–объем тела.
– элементарная масса,V–объем тела.
Первая формула предпочтительна для системы дискретных тел, вторая – для сплошных тел.
Рис. 14.1
Чтобы
пояснить, что такое свободные оси,
рассмотрим простейшую систему
тел, состоящую из двух тел одинаковой
массы
![]() ,
закрепленных на жесткомневесомом
стержне
,
закрепленных на жесткомневесомом
стержне
![]() (рис. 14.2). Стержень в свою очередь закреплен
в точкеС, являющейся
центром масс системы, на вертикальной
осиОО, которая может вращаться в
подшипникахП1иП2.
Пусть стержень составляет с осью
некоторый угол (рис. 14.2а). При вращении
системыстержень
– массына концы
стержня со стороны масс действуют силы
(рис. 14.2). Стержень в свою очередь закреплен
в точкеС, являющейся
центром масс системы, на вертикальной
осиОО, которая может вращаться в
подшипникахП1иП2.
Пусть стержень составляет с осью
некоторый угол (рис. 14.2а). При вращении
системыстержень
– массына концы
стержня со стороны масс действуют силы
![]() и
и
![]() .
Вследствие того,что
тела расположены несимметрично
относительно оси вращения, силы
.
Вследствие того,что
тела расположены несимметрично
относительно оси вращения, силы
![]() и
и![]() не лежат на одной прямой и создают
момент пары сил, стремящийся повернуть
ось, придать ей горизонтальное направление.
Чтобы ось удерживалась в неизменном
положении, подшипники должны действовать
на нее с силами
не лежат на одной прямой и создают
момент пары сил, стремящийся повернуть
ось, придать ей горизонтальное направление.
Чтобы ось удерживалась в неизменном
положении, подшипники должны действовать
на нее с силами
![]() и
и
![]() .
Таким образом, ось остается неподвижной
только благодаря подшипникам. Если
убрать подшипники, ось вращения поменяет
свое направление в пространстве. В
рассматриваемом примере быстро
изнашиваются и ось, и подшипники.
.
Таким образом, ось остается неподвижной
только благодаря подшипникам. Если
убрать подшипники, ось вращения поменяет
свое направление в пространстве. В
рассматриваемом примере быстро
изнашиваются и ось, и подшипники.
Если же ось вращения проходит через центр масс системы стержень– массыи при этом является осью ее симметрии (рис.14.2б), то силы, действующие на стержень со стороны вращающихся тел, направлены по одной прямой и, следовательно, уравновешивают друг друга.
Рис. 14.2
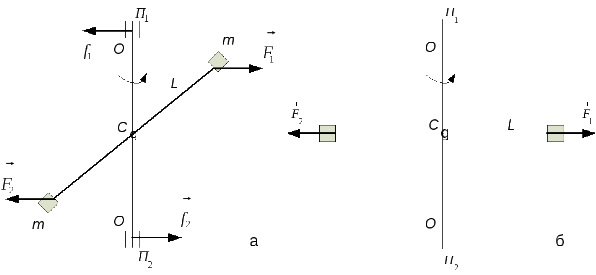
Это значит, что стержень не действует на ось, а она – на подшипники. Если подшипники убрать, ось этого не заметит, она будет сохранять свое направление в пространстве. Конечно, под действием силы тяжести система будет падать, но при этом будет продолжать вращаться в горизонтальной плоскости вокруг вертикальной оси. Такие оси, которые сами (без действия внешних сил) сохраняют неизменным свое направление в пространстве, называются свободными осями вращения.
Т
Рис. 14.3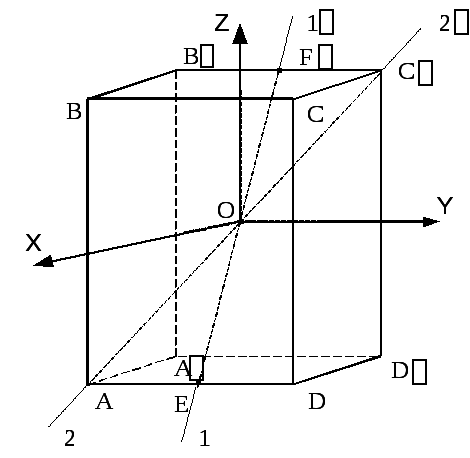
Две из трех главных осей инерции, а именно те, относительно которых момент инерции максималениминимален (на рис. это осиХиZ), являютсяустойчивыми. Третья ось, относительно которой момент инерции имеет среднее значение, – неустойчива. Осьустойчива– это значит, что при небольших случайных отклонениях вращения от этой оси возникают силы, возвращающие тело к вращению вокруг этой оси. Следовательно, в отсутствие сил сопротивления вращение вокруг устойчивых осей продолжалось бы бесконечно долго. Но силы сопротивления всегда имеют место, поэтому для поддержания вращения даже вокруг главных осей необходимо прикладывать момент внешних сил, хотя и много меньший, чем при вращении вокруг других осей. В таком случае обычно устойчивой оказывается одна главная ось, а именно та, относительно которой момент инерции имеет максимальное значение. Для того чтобы машина служила долго, вращающимся частям придают форму, возможно более близкую к телам вращения, а ось как можно точнее совмещают с главной осью инерции. Однако совместить абсолютно точно ось вращения с главной осью инерции тела практически невозможно, поэтому для быстро вращающихся частей машин применяют гибкие, самоцентрирующиеся оси.