

Расчет пусковых сопротивлений в приводах с двигателями постоянного тока независимого возбуждения.
В момент пуска w=0,![]() и достигает больших значений, что
недопустимо с точки зрения коммутации
машин.
и достигает больших значений, что
недопустимо с точки зрения коммутации
машин.
Рекомендуется ограничивать пусковой ток на уровне 2,5 от номинального. Для ограничения пускового тока в цепь якоря, на время пуска, вводится пусковое сопротивления.
Схема пуска двигателя:
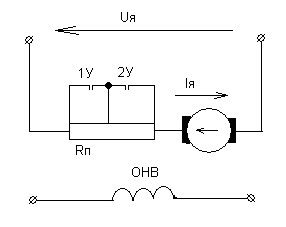
Пуск производится в три этапа:
RП(1У и 2У разомкнуты)
![]() ;
;
1У замкнут – RП1
![]() ;
;
2У замкнут – RП=0
![]() .
.
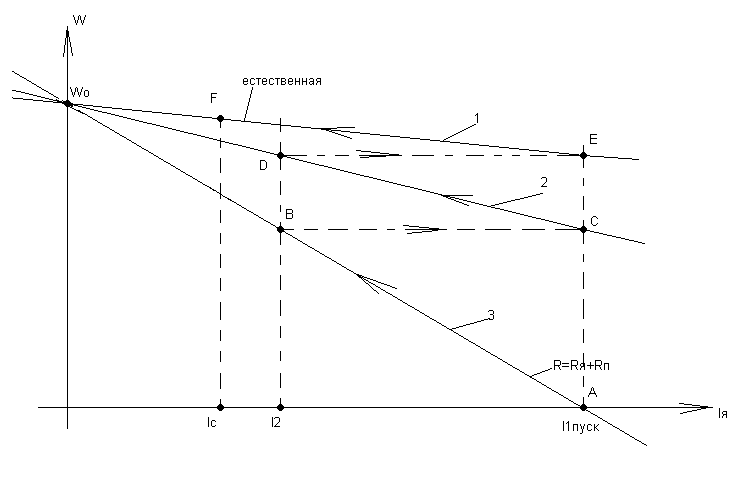
Комментарии к графику:
Двигатель начинает разгоняться из точки
А. Пусковой ток в этом случае:
![]() .
В точке В происходит замыкание 1У и
разгон продолжается по характеристике
2 (более жесткой) до точкиD.
Затем замыкается контакт 2У разгон
завершается по естественной характеристике
от точки Е до точкиF,
соответствующей току нагрузки двигателя.
.
В точке В происходит замыкание 1У и
разгон продолжается по характеристике
2 (более жесткой) до точкиD.
Затем замыкается контакт 2У разгон
завершается по естественной характеристике
от точки Е до точкиF,
соответствующей току нагрузки двигателя.
Количество ступеней RПопределяется экономичностью и требованиями
к плавности пуска (![]() ).
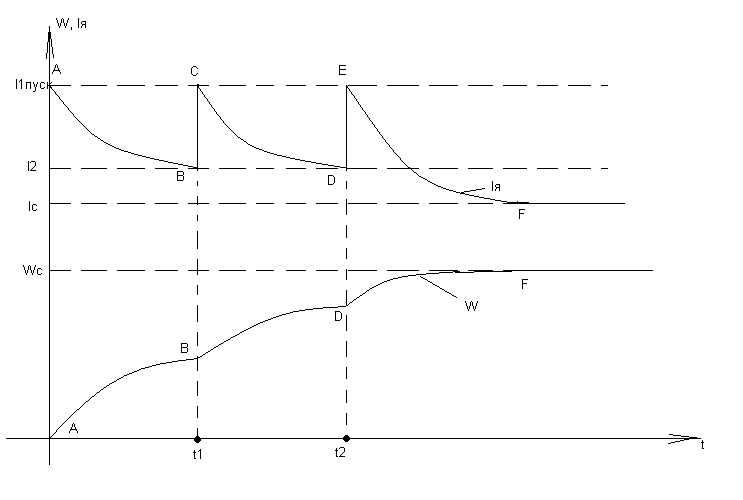
Вывод ступени производится автоматически
либо в функции времени, либо в функции
тока.
).
Вывод ступени производится автоматически
либо в функции времени, либо в функции
тока.
Изменение скорости и тока во времени при реостатном пуске показано на рисунке:
Регулирование скорости двигателей постоянного тока независимого возбуждения при шунтировании обмотки якоря и включении последовательного сопротивления.
Для получения сравнительно жестких механических характеристик при малых скоростях применяют иногда шунтирование якоря резистором RШпри обязательном включении последовательного резистораRП.
Д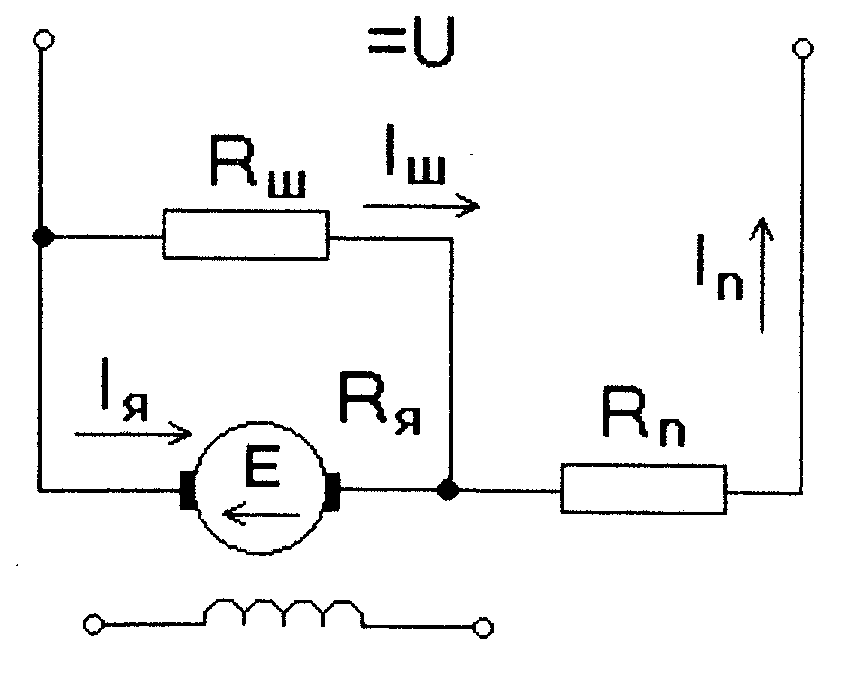 ля
приведенной схемы можно записать
следующие соотношения:
ля
приведенной схемы можно записать
следующие соотношения:
Учитывая, что
![]() ,
для электромеханической характеристики
получим уравнение:
,
для электромеханической характеристики
получим уравнение:
![]()
а для механической, с учетом
![]() :
:
![]()
В этих уравнениях коэффициент:
![]()
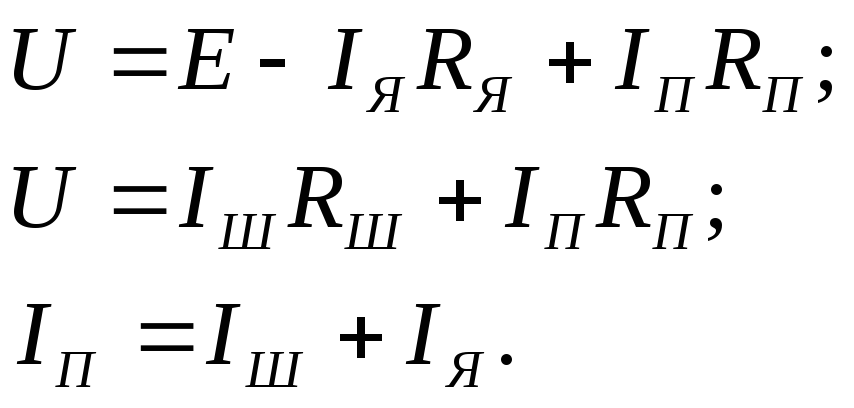
Проанализируем уравнения характеристик при изменении параметров RШиRП:
RШ=0,RП=0….
Если RП=0, то это естественная характеристика. ЕслиRП=, то это означает разрыв цепи. Якорь двигателя замкнут наRШ– это режим и характеристика динамического торможения. Семейство характеристикRП=varприведено на рисунке:
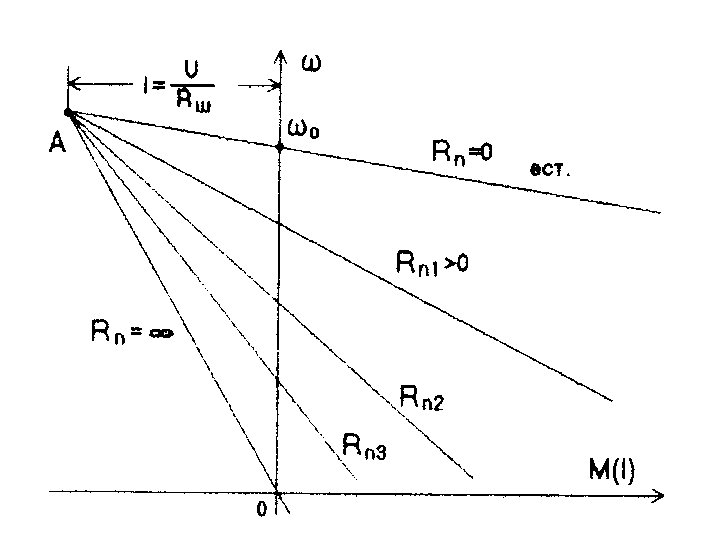
RП=const,RШ=var.
Если RШ=, то это разрыв в цепи шунтирования – это реостатная характеристика, соответствующаяRП.
Если RШ=0, то это характеристика динамического торможения при закороченном якоре двигателя. Все характеристики приRШ=varсходятся в полюсе В. Семейство механических характеристик приRШ=varприведены на рисунке:
Шунтирование якоря расширяет диапазон регулирования скорости и стабилизирует регулировочные характеристики.
Каскадные схемы включения ад. Регулирование скорости асинхронных двигателей в системе авк.
Регулирование скорости АД возможно в каскадных схемах включения.
Существуют следующие схемы:
Каскадные системы с одноякорным преобразователем;
Вентильно-машинные каскады;
Асинхронно-вентильный каскад.
Подробнее рассмотрим асинхронно-вентильный каскад (АВК).
А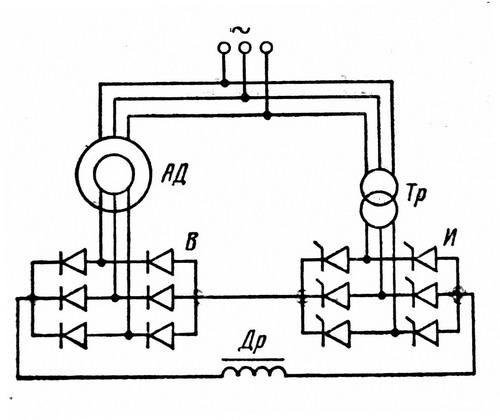 ВК
состоит из АД, вентильного неуправляемого
преобразователя В, инвертора И и
трансформатора Тр. Эта схема относится
к категории каскадов с промежуточным
звеном постоянного тока. Вентильный
преобразователь является неуправляемым
и предназначен для выпрямления тока
ротора, имеющего частоту скольжения.затем
выпрямленный ток с помощью инвертора
преобразуется в переменный ток частотой,
равной частоте сети. Для сглаживания
выпрямленного тока включен дроссель.
ВК
состоит из АД, вентильного неуправляемого
преобразователя В, инвертора И и
трансформатора Тр. Эта схема относится
к категории каскадов с промежуточным
звеном постоянного тока. Вентильный
преобразователь является неуправляемым
и предназначен для выпрямления тока
ротора, имеющего частоту скольжения.затем
выпрямленный ток с помощью инвертора
преобразуется в переменный ток частотой,
равной частоте сети. Для сглаживания
выпрямленного тока включен дроссель.
Принцип действия каскада заключается в следующем. В цепь выпрямленного тока ротора вводится с помощью инвертора регулируемая добавочная ЭДС.
Выпрямленный ток определяется по формуле:
![]()
Если выпрямитель и инвертор включены
по трехфазной мостовой схеме, то:
![]()
![]()
![]() - суммарное падение напряжения в вентилях
роторной и инверторной групп;
- суммарное падение напряжения в вентилях
роторной и инверторной групп;
![]()
где
![]() ,
,![]() - реактивное и активное сопротивления
трансформатора, приведенные к его
вторичной обмотке;
- реактивное и активное сопротивления
трансформатора, приведенные к его
вторичной обмотке;
![]() - угол регулирования инвертора.
- угол регулирования инвертора.
В двигательном режиме при угловой скорости ниже синхронной поток энергии направлен от выпрямителя к инвертору и ток и напряжение выпрямительной цепи имеют одинаковое направление.
Момент АД равен:
![]() ,
,
где
![]() - ток ротора, а так как магнитный поток
пропорционален ЭДС, то
- ток ротора, а так как магнитный поток
пропорционален ЭДС, то
![]() .
.
Зависимость
![]() отSдля вентильного
каскада можно записать в виде:
отSдля вентильного
каскада можно записать в виде:
![]() .
.
А момент определяется следующим выражением:
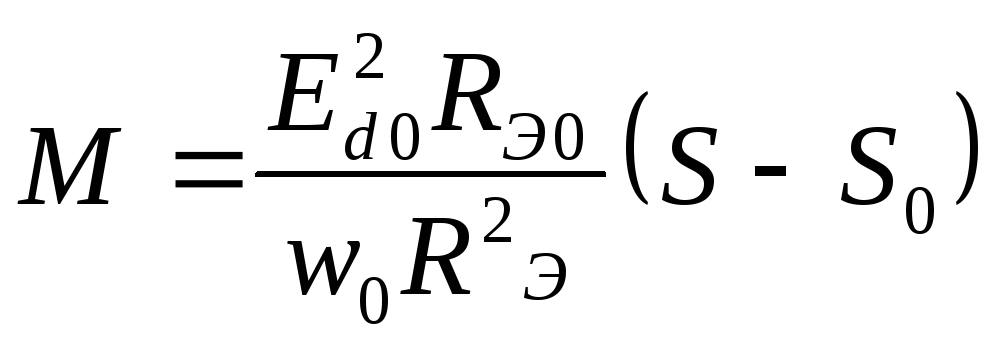 ,
,
где
![]() .
.
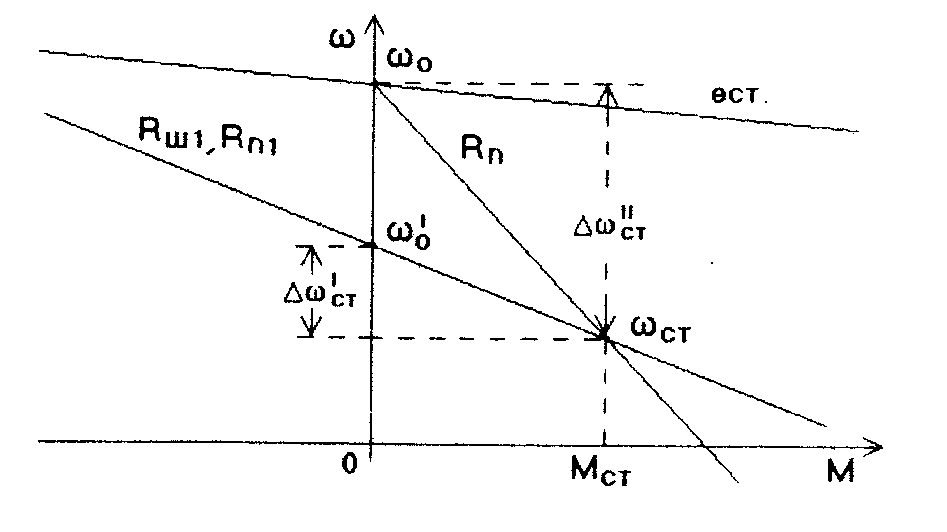
Формула дает приближенное аналитическое выражение для механической характеристики АД в схеме вентильного каскада.
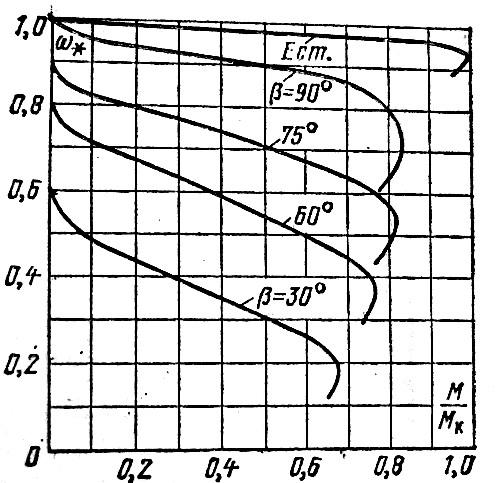
Скорость холостого хода и соответствующее
ей скольжение зависят от угла
![]() ;
при
;
при![]() =90
=90![]() .
.
Регулировочные свойства каскада при
уменьшении его скорости (уменьшении
угла
![]() )
ограничены допустимым углом инвертирования,
который должен составлять:
)
ограничены допустимым углом инвертирования,
который должен составлять:
![]() ,
,
где
![]() - угол восстановления запирающих свойств
вентилей (примерно 2);
- угол восстановления запирающих свойств
вентилей (примерно 2);
![]() - угол коммутации инвертора.
- угол коммутации инвертора.
Сверху диапазон регулирования ограничен падением напряжения в элементах цепи.