

контрольная_работа_САУ_14
.pdfКонтрольная работа по «САиУ»
Задание 1.
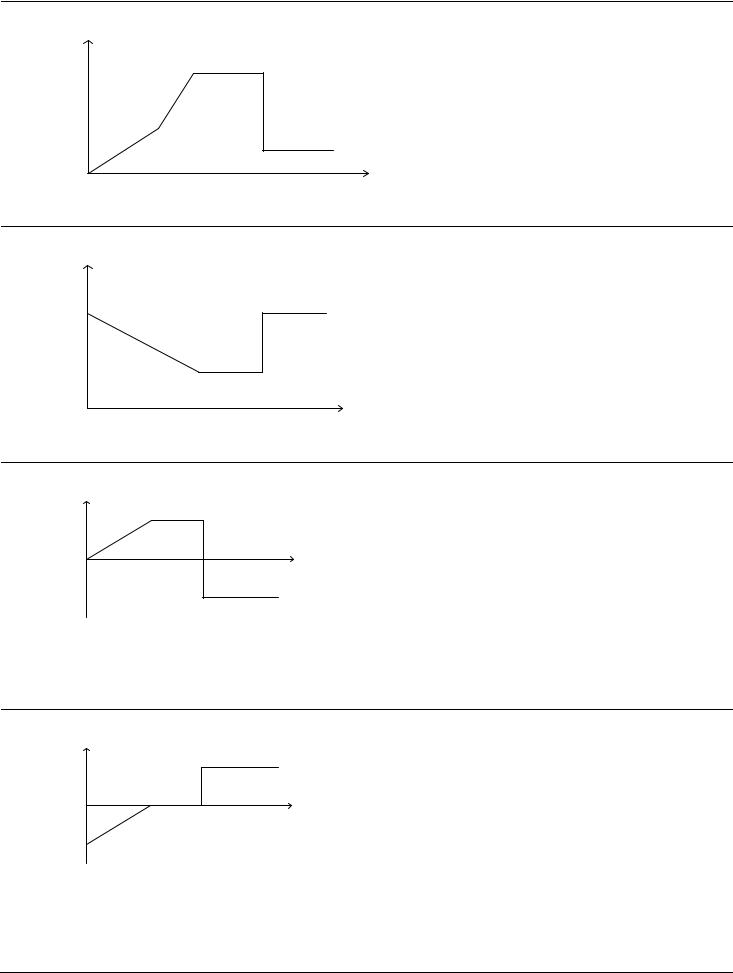
Рассчитайте, как будет изменяться выходной сигнал каждого звена во времени при подаче входного сигнала x(t). Соединение звеньев вашего варианта представлено на рис.1. Траектория входного сигнала – на рис.2.
Значения параметров звеньев и начальные условия по вариантам:
1.Т1=0,5с; Т2=0,8с; К=2. Начальные условия y(0)=z(0)=u(0)=0.
2.Т1=0,2с; Т2=5с; К=4. Начальные условия y(0)=z(0)=u(0)=40.
3.Т1=0,8с; Т2=1,2с; К=10. Начальные условия y(0)=z(0)=u(0)=0.
4.Т1=0,8с; Т2=1с; К=5. Начальные условия y(0)=z(0)=u(0)=0,4.
5.Т1=0,6с; Т2=10; К=6. Начальные условия y(0)=z(0)=u(0)=-5.
6.Т1=4с; Т2=4с; Т3=3с. Начальные условия y(0)=z(0)=u(0)=5.
7.Т1=5с; Т2=10с; Т3=10с. Начальные условия y(0)=z(0)=u(0)=-5.
8.Т1=10с; Т2=8с; Т3=4с. Начальные условия y(0)=z(0)=u(0)=3.
9.Т1=1с; Т2=3с; К=1,5. Начальные условия y(0)=z(0)=u(0)=0.
10.Т1=7с; Т2=1с; Т3=4с. Начальные условия y(0)=z(0)=u(0)=10.
11.Т1=4,5с; Т2=5с; К=0,1. Начальные условия y(0)=z(0)=u(0)=5.
12.Т1=3с; Т2=8с; К=2. Начальные условия y(0)=z(0)=u(0)=0.
13.Т1=1с; Т2=3с; К=0,2. Начальные условия y(0)=z(0)=u(0)=5.
14.Т1=10с; Т2=0,9с; К=4. Начальные условия y(0)=z(0)=u(0)=25.
15.Т1=2с; Т2=3с; К=4. Начальные условия y(0)=z(0)=u(0)=0.
16.Т1=10с; Т2=5с; Т3=3. Начальные условия y(0)=z(0)=u(0)=0.
17.Т1=0,3с; Т2=3с; Т3=6с. Начальные условия y(0)=z(0)=u(0)=40.
18.Т1=6с; Т2=0,8с; Т3=3с. Начальные условия y(0)=z(0)=u(0)=0.
19.Т1=0,2с; Т2=0,4с; К=5. Начальные условия y(0)=z(0)=u(0)=0.
20.Т1=1,4с; Т2=0,4с; Т3=4с. Начальные условия y(0)=z(0)=u(0)=20.
Рассчитанные траектории представить на общем графике. Несколько точек рассчитать вручную с пояснениями.

Рис.1. Структурные схемы звеньев по вариантам |

Варианты 1,2 и 17: |
Варианты 3,4: |
|
|
Варианты 5,6 и 18: |
Варианты 7,8 |
|
|
Варианты 9,10 и 19: |
Варианты 11, 12 |
|
|
Варианты 13,14 и 20: |
Варианты 15,16: |
|
|
Рис.2. Траектории входного сигнала x(t) по вариантам

Преобразуйте структурную схему к типовой схеме замкнутого контура следующего вида и напишите передаточную функцию системы Wyx(p) по каналу х – у.
Задание 2
x (t) |
|
y (t ) |
|
|
W1(p ) |
W1 |
(p ) |
|
|
W y x(p )= |
|
|
|
1 + W1(p ) W2(p ) |
|
|
W2(p ) |
|
|
Вариант 1 |
Вариант 9 |
Вариант 2 |
Вариант 10 |
Вариант 3 |
Вариант 11 |
Вариант 4
Вариант 12

Вариант 5 |
|
Вариант 13 |
W1(p) |
W (p) |
|
|
2 |
|
|
|
W3(p) |
|
|
y(t) |
|
|
W4(p) |
|
главная |
W5(p) |
|
о.с. |
|
x(t) |
|
|
Вариант 6 |
|
Вариант 14 |
|
|
W1(p) W2(p)
главная
о.с.
Вариант 7 |
x(t) |
Вариант 15
Вариант 8
Вариант 16
W3(p)
y(t)
W4(p)
W5(p)

Задание 3
1.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
11 |
|
|
(2 P +1)(0,04 P +1)(0,12 P +1) |
2.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
1 |
|
|
5 P(2 P +1)(P +1) |
3.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
6,4 |
|
|
P(0.1P +1) |
4.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
1 |
|
|
(0,5 P +1)(8 P +1)(0,05 P +1)(0,15 P +1) |
5.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
1
W (P )= 43,5 P(20 P +1)(5,3 P +1).
6.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
28 |
|
|
(10 P +1)(3 P +1)(16 P +1) |
7.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и
5
укажите его показатели качества. ОУ имеет следующую передаточную функцию: W (P )=
0,05 P +1
8.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:

W ( P ) = |
28 |
|
|
(9 P + 1)(2 P + 1)(19 P + 1) |
9.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = 3,3
33 P(21,3 P + 1)(1,3 P + 1)(2,3 P + 1)(3,1 P + 1)
10.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = |
1,1 |
|
|
(52 P + 1)(4 P + 1)(5 P + 1)(2 P + 1) |
11.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = 74
30 P(18 P + 1)
12. Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = |
7 |
|
|
(8 P + 1)(2 P + 1)(18 P + 1) |
13.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = 1
30 P(2 P + 1)
14.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = |
1 |
|
|
(0.5 P + 1)(1.8 P + 1)(3.5 P + 1)(6.2 P + 1) |
15.Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W ( P ) = |
42 |
|
|
( P + 1)(3 P + 1)(10 P + 1) |
Синтезируйте систему с замкнутым управлением. Выберите подходящий тип регулятора, выбор обоснуйте. Изобразите структурную схему системы. Рассчитайте оптимальные настройки регулятора. Постройте переходный процесс в системе с нулевыми начальными условиями и укажите его показатели качества. ОУ имеет следующую передаточную функцию:
W (P )= |
6.5 |
|
|
(240 P +1)(180 P +1)(30 P +1)(15 P +1) |
Задание 4
1.Изобразите траекторию изменения выходного сигнала ПИ-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
2.Изобразите траекторию изменения выходного сигнала ПД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
3.Изобразите траекторию изменения выходного сигнала ПИ-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
4.Изобразите траекторию изменения выходного сигнала ПД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.

5.Изобразите траекторию изменения выходного сигнала ПИД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
6.Изобразите траекторию изменения выходного сигнала ПИД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
7.Изобразите траекторию изменения выходного сигнала ПИД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.
8.Изобразите траекторию изменения выходного сигнала ПИД-регулятора, если на вход поступает сигнал следующего вида:
Напишите формулу закона регулирования, его передаточную функцию. Перечислите преимущества и недостатки данного регулятора.