

Министерство науки и образования Российской Федерации
Федеральное агентство по образованию
ГОУ ВПО «Магнитогорский Государственный Технический Университет им. Г.И. Носова»
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
по курсу «Теория автоматического управления»
Вариант 2.1.1
Выполнила:
студентка гр. АП-09
Н.В. Никитина
Проверил:
доц. каф. ЭиМЭ
канд. техн. наук
Р.С. Пишнограев
Магнитогорск – 2011
СОДЕРЖАНИЕ
Задание
-
Определение передаточной функции объекта по управляющему воздействию WРАЗ(p)
-
Определение передаточной функции объекта по управляющему воздействию Wf(p)
-
Определение устойчивости объекта управления при помощи алгебраического критерия
-
Синтез регулятора WP(p)
-
Проверка устойчивости САУ графическим критерием
-
Определение коэффициента ошибки системы при линейно изменяющемся управляющем воздействии
-
Библиографический список
ЗАДАНИЕ
-
Полагая WР(р) = 1 и WОС(р) = 0, привести в общем виде:
WРАЗ(р) – передаточную функцию объекта управления по управляющему воздействию x; Wf(p) – передаточную функцию объекта управления по возмущающему воздействию f.
Все преобразования структурной схемы объекта привести в пояснительной записке.
-
При известных типах и параметрах W1(p)..W4(p) определить характер устойчивости объекта по управляющему воздействию с помощью любого алгебраического критерия.
-
При WОС(р) = 1 выполнить синтез регулятора WР(р) для обеспечения астатизма системы первого порядка и запаса устойчивости системы управления, не менее φз = 30º.
-
Проверить устойчивость полученной системы управления (с учётом регулятора) любым графическим критерием. Показать на графиках запас устойчивости по амплитуде КЗ и фазе φз.
-
Определить We(р) – передаточную функцию объекта управления и регулятора по ошибке регулирования в общем виде. Все необходимые преобразования структурной схемы объекта привести в пояснительной записке.
-
При известных типах и параметрах W1(p)..W4(p) определить коэффициент ошибки системы по ускорению.
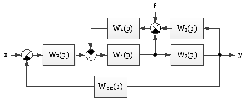
Рисунок 1 – Структурная схема системы автоматического управления
Таблица 1 – Параметры звеньев системы автоматического управления
|
W1(p) |
W2(p) |
W3(p) |
W4(p) |
|
|
|
|
K4 |
|
K1 = 2 τ2 = 0,0008 |
K2 = 160
|
K3 = 0,075 |
K4 = 0,1 |



 = 0,00025
= 0,00025
1. Определение передаточной функции объекта по управляющему воздействию wраз(p)
На рисунке 2 показана исходная структурная схема исследуемой системы управления. Согласно принципу суперпозиции, определение передаточной функции системы по управляющему воздействию x осуществляется при отсутствии возмущающего воздействия f [1]. На основании данного принципа с учётом условий задания WР(р) = 1 и WОС(р) = 0 исходная структурная схема рисунка 2 преобразуется в структурную схему, показанную на рисунке 3.

Рисунок 2 – Исходная структурная схема системы автоматического управления
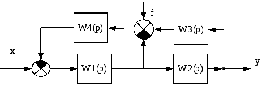
Рисунок 3 – Структурная схема системы автоматического управления с учётом условий задания и принципа суперпозиции
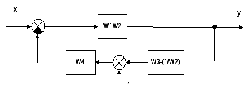
На рисунке 3 узлы, обозначенные цифрами 1 и 2 могут быть представлены как две параллельные линии связи: первая – с выхода звена W1(p) на вход сумматора обратной связи этого же звена, вторая - с выхода звена W1(p) на вход звена W4(p). Таким образом структурная схема рисунка 3 может быть преобразована к виду, показанному на рисунке 4. Кроме этого, на рисунке 4 обозначены участки элементарных способов соединения звеньев САУ: звено W1(p), охваченное единичной положительной обратной связью (I, рисунок 4); параллельное включение звеньев W2(p) и W4(p) (II, рисунок 4).



По входу х:

по возмущающему воздействию:

Таким образом, разомкнутая передаточная функция объекта управления WРАЗ(p) имеет вид:

Выполним необходимые подстановки в данное выражение с учётом данных таблицы.


2. Определение передаточной функции объекта по управляющему воздействию Wf(p)
Согласно принципу суперпозиции, с учётом условий задания, передаточная функция объекта управления по возмущающему воздействию f вырождается в выражение:

Выполнив подстановку данных из таблицы
в выражение
 получим:
получим:

3. Определение устойчивости объекта управления при помощи алгебраического критерия
Для определения степени устойчивости объекта управления воспользуемся критерием Гурвица. С этой целью определим передаточную функцию замкнутой системы, т.е. при

Известно, что передаточная функция замкнутой системы может быть определена как:


Из данного выражения следует, что характеристическое уравнение объекта управления D(p) представляет собой полином:

Тогда коэффициенты характеристического
уравнения D(p)
равны: a0 =  ;
a1 = 0,001;
a2 = 3,2.
Составим матрицу Гурвица G
и найдём все её диагональные определители
Δii:
;
a1 = 0,001;
a2 = 3,2.
Составим матрицу Гурвица G
и найдём все её диагональные определители
Δii:



Так как все главные определители матрицы Гурвица положительны, можно сделать вывод об устойчивости объекта управления.