

3.9 Розроблення схеми передачі стрілок на місцеве керування
Передача стрілок на місцеве керування (далі – МК) передбачається при великих обсягах маневрової роботи на станції. На станції, що проектується необхідно передбачити передачу стрілок 37 та 39,41 на МК. Схема передачі цих стрілок на МК наведена на додатку К. При цьому проводиться маневрова робота на коліях 5к, 7к, 9к, та 11к.
Кола передачі стрілки на МК включають наступні реле:
– РМ – дозволу маневрів – призначене для сприйняття команди переходу на МК, перевірки положення стрілок, що передаються на МК та незамкнутості в маршрутах секцій, до яких належать ці стрілки;
– МИ – виключення маршрутів – для виключення встановлення маршрутів, ворожих МК, та перемикання з центрального керування на місцеве;
– РВ – сприйняття дозволу маневрів;
– СМУ – стрілочне реле МК;
– МУС – маневрове керуюче сигнальне;
– Д – децентралізуюче;
– ГВ – включення гудка.
Для здійсненя переходу на МК стрілки повнні знаходитись в одному з крайніх положень (в данному випадку – плюсовому). Стрілочні секції, до яких належать стрілки, що передаються на МК повинні бути не замкнутими в маршрутах.
Модернізація систем електричної централізації
4.1 Розроблення структурної схеми системи
Комп'ютерна система Ebilock-950 розроблена фахівцями шведської фірми АBB Сигнал АБ для управління стрілками, сигналами та іншими об'єктами на станції. Напільне обладнання та релейна апаратура в МПЦ використовуються російського виробництва.
МПЦ є однією з систем останнього покоління і може застосовуватися або як локальна система, або в складі АСУ рухом поїздів вищого рівня.
МПЦ відноситься до класу децентралізованих систем і побудована за модульним принципом, де логіка і безпеку поїздів здійснюється в центрі, а апаратура безпосереднього управління об'єктами винесена в горловини станцій.
Застосування МПЦ дозволяє, як правило, відмовитися від будівництва нових службово-технічних будівель, забезпечити економію кабельної продукції та енергоресурсів, ув'язку з автоматизованими системами вищого рівня, скоротити експлуатаційні витрати.
Технічна структура МПЦ «Ebilock-950» приведена на малюнку 4.1. До складу системи входять: апаратура управління і контролю; центральний процесорний модуль (ЦПМ); модулі контейнерного типу з концентраторами і об'єктними контролерами (МОК); підлогове обладнання СЦБ.
Управління МПЦ здійснюється з АРМа ДСП, створеного на базі типової ПЕОМ.
Робота МПЦ контролюється по відображенню об'єктів на дисплеї АРМа ДСП, управління здійснюється з клавіатури АРМа.
Діагностика МПЦ і контроль технічних параметрів здійснюється з АРМа ШН. Цей же АРМ веде протокол дій ДСП і роботи МПЦ.
Рисунок
4.1 Структурна схема МПЦ Ebilock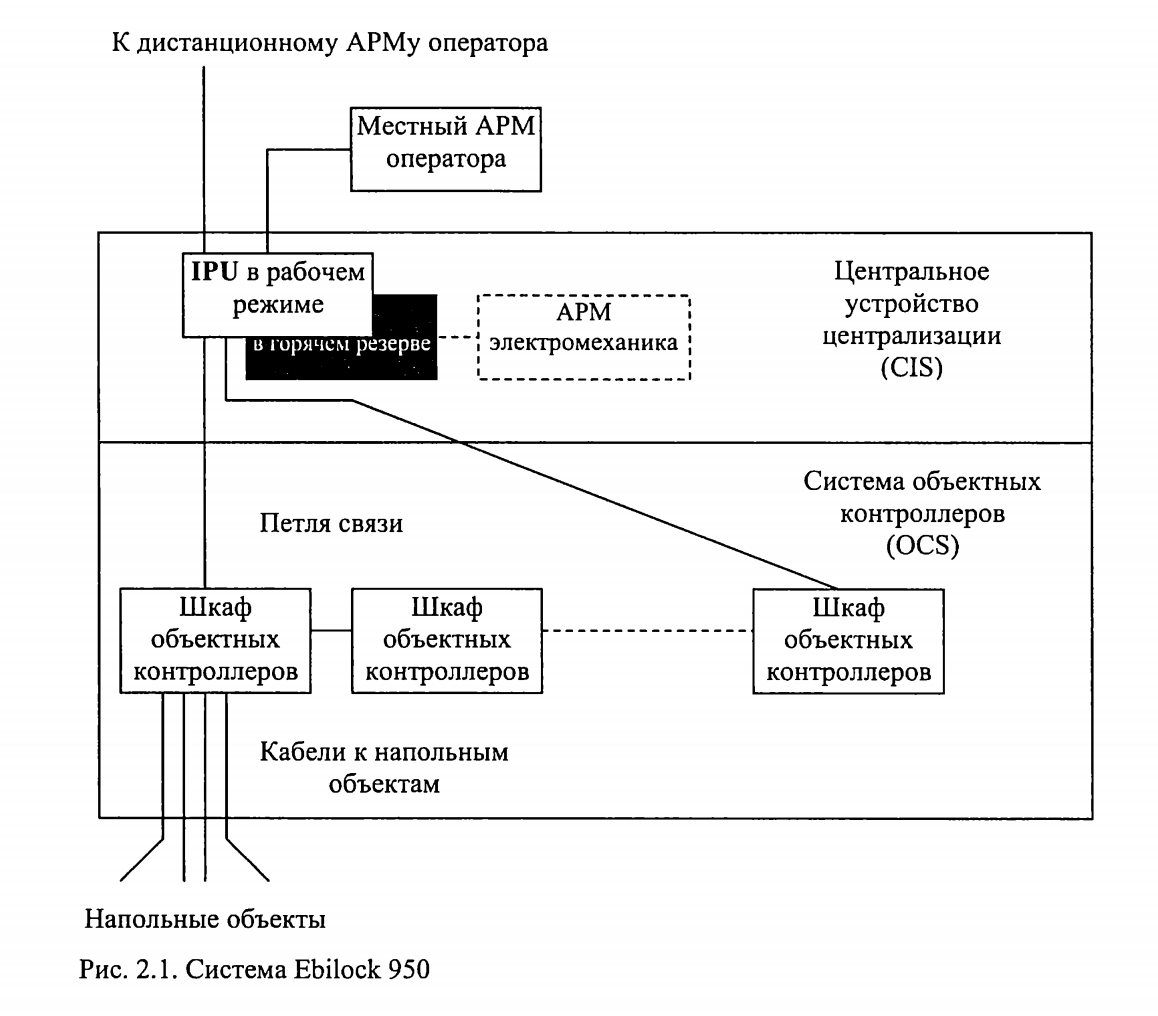
4.2 Розрахунок кількості елементів сполучення вхідних/вихідних кіл контролерів з напільними об’єктами
До пристроїв управління належать об'єкти, перелік яких приведений таблиці 4.1. У таблиці 4.1 наведений перелік об’єктів для станції. Кількість виходів на один об'єкт береться виходячи з діючих схем сигналізації, централізації і блокування.
Таблиця 4.1 – Перелік об’єктів керування та контролю
№ п/п |
Тип об’єкту |
Кіл-ть |
Блок НГ |
Блок ВГ |
Перелік об’єктів |
1 |
Стрілки, які не передаються на місцеве керування |
10 |
НСС |
С |
1/3, 5/7, 9/11, 13/15, 19/21,23/25, 27/29,31/33 |
НСО |
17,35 |
||||
2 |
Стрілки, які передаються на місцеве керування |
3 |
НСС |
С |
_ |
НСО |
37,39,41 |
||||
3 |
Вхідні світлофори |
2 |
НПМ |
ВД |
Н, НД |
4 |
Вихідні світлофори |
6 |
НПМ |
ВI+ВД |
Ч11, Ч9, Ч7, ЧІІ, Ч4 |
5 |
Маневрові світлофори |
15 |
НПМ |
МIII |
М3, М1,М33,М35,М31 |
НМІІП |
МII |
М15,М21,М25,М27 |
|||
НМІІАП |
М29,М23,М19,М17 |
||||
НМІІП |
МIII |
М13 |
|||
НМІІАП |
M5 |
||||
НМІП |
МІ |
_ |
|||
6 |
Стрілочно-колійні ділянки |
14 |
_ |
СП |
3СП, 9-15СП, 15-33СП, 1СП, 19-35СП, 7СП, 11-13СП, 23-29СП, 5СП, 17СП,25-27СП,37СП,39СП,41СП |
7 |
Безстрілочні ділянки |
4 |
_ |
УП |
НП, НДП, 1/19П,11/23П |
8 |
Ділянки віддалення- приближення |
4 |
_ |
_ |
Н1П, Н2П, НД1У, НД2У |
9 |
Приймально-відправні колії |
8 |
_ |
П |
5П, 3П, ІП, ІІП, 4П, 7П, 9П,11П |
10 |
Дозвіл на відправлення |
2 |
_ |
_ |
РОН, РОЧ |
11 |
Зміна напрямку руху одноколійної АБ |
2 |
_ |
_ |
СН-Н, СН-Ч |
12 |
Відміна |
1 |
_ |
_ |
ОГ |
13 |
Допоміжний прийом та відправлення |
6 |
_ |
_ |
НПВ, НОВ, НОВ-ЧПВ, ЧПВ, ЧОВ, ЧОВ-НПВ |
Сімейство об’єктних контролерів (ОК) складається з безлічі сумісних один з одним компонентів: контролери, програматори, пристрої периферії, а також системи обслуговування, візуалізації і комунікацій. Такий підхід дозволяє досить повно враховувати специфічні вимоги замовника.
У тих випадках, коли необхідно забезпечити безпеку МПЦ Ebilock-950 пропонує ОК призначені для роботи в системах з підвищеними вимогами до експлуатаційної готовності, де неприпустимі зупинки виробничого процесу.
Кількість виходів на один об’єкт береться з діючих схем сигналізації, централізації та блокування.
Таблиця 4.2 – Визначення необхідної кількості виходів
Об’єкт керування |
Примітка |
Кількість виходів на один об’єкт |
Кількість об’єктів |
Загальна кількість виходів «+» |
Загальна кількість виходів «–» |
Загалом |
|
«+» |
«–» |
||||||
Вихідні світлофори |
КС |
1 |
– |
5 |
5 |
0 |
|
Н |
– |
1 |
0 |
5 |
|||
ОТ |
2 |
– |
10 |
0 |
|||
С |
– |
2 |
0 |
10 |
|||
МС |
2 |
– |
10 |
0 |
|||
Вхідні світлофори |
КС |
1 |
– |
2 |
2 |
0 |
|
Н |
– |
1 |
0 |
2 |
|||
ОТ |
1 |
– |
2 |
0 |
|||
С |
2 |
– |
4 |
0 |
|||
Маневрові світлофори |
КС |
1 |
– |
15 |
15 |
0 |
|
Н |
– |
1 |
0 |
15 |
|||
ОТ |
2 |
– |
30 |
0 |
|||
МС |
2 |
– |
30 |
0 |
|||
КМ |
– |
1 |
0 |
15 |
|||
Стрілки |
в плюс |
1 |
– |
13 |
13 |
0 |
|
в мінус |
1 |
– |
13 |
13 |
0 |
||
Відміна |
|
2 |
– |
1 |
2 |
0 |
|
Зміна напрямку |
|
1 |
– |
2 |
2 |
0 |
|
Допоміжний прийом та відправлення |
|
1 |
– |
6 |
6 |
0 |
|
Дозвіл на відправлення |
|
1 |
– |
2 |
2 |
0 |
|
Загалом: |
146 |
47 |
193 |
||||
У таблиці 4.2 приведена необхідна кількість виходів для однієї горловини. Щоб визначити необхідну кількість виходів для станції в цілому приймемо кількість виходів вдвічі більшою ніж для однієї горловини, при цьому не враховуючи: відміну, зміну напряму, допоміжний прийом і відправлення, дозвіл відправлення.
У даній системі не використовуються 7 і 8 кола виконавчої групи БМРЦ (кола індикації), оскільки відсутній основний пульт. Ці кола використовуватимуться для підключення входів, причому в них подаватиметься 24 В постійного струму, оскільки напруга-24 В, звичайно використовувана в колах індикації, є нестандартною для ПЛК. Кількість входів на один об'єкт береться виходячи з діючих схем сигналізації, централізації і блокування.
Для визначення необхідної кількості входів в цілому для станції приймемо загальну кількість входів вдвічі більшою за кількість входів для однієї горловини не враховуючи наступні входи: прийомо-відправні колії, відміна, штучне розмикання, установка маршруту, фідера, подвійне зниження напруги, контроль перегорання запобіжників, макет стрілки, режим сигналів «День-Ніч», режим сигналів «Автомат.-Ручн.», резервна електростанція (контроль ДГА), контроль батареї.
Розрахунок потрібної кількості входів
Кількість входів на один об’єкт береться з діючих схем сигналізації, централізації та блокування.
Таблиця 4.3 – Визначення необхідної кількості входів
№ п/п |
Тип об’єкта контроля |
Кількість, шт |
Найменування об’єктів контроля даного типу |
Кількість входів на один об’єкт контроля, шт |
Загальна кількість входів |
1 |
Стрілки |
13 |
1/3, 5/7, 9/11, 13/15, 19/21,23/25, 27/29,31/33 17,35,37,39,41
|
2 |
26 |
2 |
Безстрілкові ділянки шляху в горловинах станції |
4 |
НП, НДП, 1/19П,11/23П |
2 |
8 |
3 |
Стрілочно-колійні ділянки |
14 |
3СП, 9-15СП, 15-33СП, 1СП, 19-35СП, 7СП, 11-13СП, 23-29СП, 5СП, 17СП,25-27СП,37СП,39СП,41СП |
2 |
28 |
4 |
Приймально-відправні колії |
8 |
5П, 3П, ІП, ІІП, 4П, 7П, 9П,11П |
2 |
16 |
5 |
Ділянки віддалення- приближення |
4 |
Н1П, Н2П, НД1У, НД2У |
1 |
4 |
6 |
Вхідні світлофори |
2 |
Н, НД |
4 |
8 |
7 |
Вихідні та маршрутні світлофори |
5 |
Ч11, Ч9, Ч7, ЧІІ, Ч4 |
2 |
10 |
8 |
Маневрові світлофори |
15 |
|
1 |
15 |
9 |
Відміна |
4 |
|
1 |
4 |
10 |
Штучне розмикання |
1 |
ИР |
1 |
1 |
11 |
Встановлення маршруту |
4 |
Н, Ч, НМ, ЧМ |
1 |
4 |
12 |
Фідери |
2 |
1Ф, 2Ф |
1 |
2 |
13 |
Контроль зайнят. перегону |
2 |
ЧКП, НКП |
2 |
4 |
14 |
Напрямок руху на перегоні |
4 |
ЧП, НП, ЧО, НО |
1 |
4 |
15 |
Двойне зниження напруги |
1 |
ДСН |
1 |
1 |
16 |
Контроль перег. запобіжн. |
1 |
КПА |
1 |
1 |
17 |
Макет стрілки |
1 |
МАКЕТ |
3 |
3 |
18 |
Режим сигналів День-Нічь |
2 |
ДН, НН |
1 |
2 |
19 |
Режим сигналів Автомат.-Ручн. |
2 |
АР, РР |
1 |
2 |
20 |
Резервна електростанція (контроль ДГА) |
1 |
Т-К |
1 |
1 |
21 |
Контроль батареї |
1 |
Б |
1 |
1 |
22 |
“Земля” |
1 |
З |
1 |
1 |
23 |
Дозвіл на відправлення |
2 |
РОН, РОЧ |
1 |
2 |
25 |
Загалом: |
147 |
|||
У якості модуля вводу використовуємо 1BL00-OAAO на 32 входи – напруга на входах =24В.
Необхідне число модулів визначається по формулі:
Nвв=no6/nH,
де n0б - загальна кількість входів;
nH - кількість на вході одного модуля.
Тоді число модулів складе:
Nвв=147/32=4,59≈5 модулів введення
Як вже зазначалося, необхідно виконати модернізацію релейної електричної централізації на базі контролера Ebilock-950 - ОК. Цей контролер є достатньо потужним і його можна використовувати для вирішення крупних задач автоматизації.
Модульна конструкція, що складається з набору 8 типів блоків, дозволяє скомпонувати систему управління відповідно до поставлених задач.
Необхідне число модулів виведення визначається з виразу
Nвыв=n0б/nH,
де n0б - число виходів;
nH – кількість на вході одного модуля.
Тоді число модулів складе:
Nвив (+)=146/16=9,12
Nвив (-)=47/16=2,93≈3
Загальна кількість модулів введення-виведення складає:
5+12+3=20 штук.
З кінцевих розрахунків бачимо, що потрібно 5 контролерів по 32 входи на вхід, та 15 контролерів по 16 входів на вихід.
4.3 Розроблення функціональної схеми
У процесі керування система виконує функції, сукупність яких охвачує увесь состав задач керування та характеризує склад курування. Ця сукупність представляє собою систему зв’язаних функцій управляння. Така сукупність функцій може бути розкладена на більш прості сукупності задач керування та представлена деревом функцій.
Функції системи в цілому:
1. По керуванню та контролю, яка повинна забезпечувати виконання керування та контроль станів напільних пристроїв.
2. Нормативно-довідкова, яка повинна забезпечувати всіма необхідними даними для ефективної роботи системи керування (ТРА станції), в якій вказується усі вимоги, що висуваються до технологічного перевізного процесу.
3.Діалогова, яка повинна забезпечувати взаємодію оперативного і обслуговуючого персоналу з системою керування.
4. Діагностики технічних засобів, глибина контролю визначається заказником.
5. Протоколювання – ведення «чорного ящику», у якому фіксуються усі дії оперативного та обслуговуючого персоналу, та режими станів об’єктів керування і контролю.
6. Зв’язку, яка забезпечує взаємодію з іншими інформаційними системами за рахунок використання інтерфейсів (Ethernet, CAN).
Цільова функція F0 – управління та забезпечення безпеки рухом поїздів і здійснення маневрової роботи.
До основних функцій можна віднести:
F1 – завдання поїзних і маневрових маршрутів
F 1.1 – визначення параметрів маршруту
F 1.1.1 – визначення початку маршруту
F 1.1.2 – визначення категорії маршруту
F 1.1.3 – визначення напрямку маршруту
F 1.1.4 – визначення траси маршруту
F 1.1.5 – можливість установки варіантного маршруту
F 1.2 – Управління стрілками
F 1.2.1 – перевірка фактичного положення стрілки
F 1.2.2 – формування команди на переведення стрілок у потрібне положення
F 1.3 – перевірка умов безпеки
F 1.3.1 – контроль стану стрілочних і безстрелочних секцій, приймально відправних колій і ділянок наближення
F 1.3.1.1 – контроль зайнятості колії;
F 1.3.1.1.1 – контроль вступу поїзда на маршрут
F 1.3.1.1.2 – послідовність заняття секцій маршруту
F 1.3.1.2 – контроль вільність колії;
F 1.3.1.2.1 – звільнення маршруту
F 1.3.1.3 – контроль замикання маршруту;
F 1.3.1.4 – контроль штучного розмикання;
F 1.3.2 – наявність контролю стрілок (ходових і охоронних стрілок)
F 1.3.2.1 – контроль плюсового, мінусового положення стрілки;
F 1.3.2.2 – контроль розрізу стрілки;
F 1.3.2.3 – контроль передачі стрілки на місцеве управління;
F 1.3.3 – відсутність штучного розмикання
F 1.3.4 – відсутність ворожих маршрутів
F 1.3.4.1– зустрічних маршрутів на будь-яку ділянку шляху або секцію в горловині станції;
F 1.3.4.2 – поїзного маршруту на колію за наявності зустрічних маршрутів або до поїзних світлофорів у створі;
F 1.3.4.3 – маршруту, якщо продовження іншого встановленого маршруту при згаслому огороджує світлофорі перетинає передбачуваний до установки маршрут;
F 1.3.4.4 – маршруту до згаслого світлофора, якщо продовження цього маршруту буде перетинати вже встановлений маршрут;
F 1.3.4.5 – маршрутів, що включають стрілки, передані на місцеве управління;
F 1.3.4.6 – маршрутів при включенні пристроїв огородження.
F 1.3.5 – перевірка умов безпеки при управлінні світлофорами
F 1.3.5.1 – відкриття поїзного світлофора, якщо в маршруті мається будь зайнятий шляховий ділянку (включаючи негабаритний), або відкриття маневрового світлофора, якщо в маршруті мається зайнятості стрілочних секцій;
F 1.3.5.2 – відкриття світлофорів, що відповідають даному маршруту, якщо стрілки, включаючи охоронні, не замкнуті в маршруті або не мають контролю необхідного положення;
F 1.3.5.3 – збереження дозволяючого показання на світлофорі, що огороджує маршрут, при штучній обробленні секцій маршруту;
F 1.3.5.4 – збереження дозволяючого показання світлофора при втраті контролю стрілки, що входить у маршрут, або охоронної стрілки, а також при занятті будь-якого колійного ділянки, що входить в маршрут, за винятком першої ділянки за світлофором і шляхи в маневрових маршрутах;
F 1.3.5.5 – згаслі або не відповідне вимогам керівних вказівок, стан відкритого світлофора при перегорання лампи дозволяючого вогню протягом часу, більшого, ніж час уповільнення сигнального реле на відпадіння
F 1.3.5.6 – відкриття і збереження відкритого стану світлофора при включенні загороджувальних світлофорів, світлофорів прикриття
F 1.3.5.7 – відсутність запрошувального сигналу
F 1.3.5.8 – контроль справності ниток ламп світлофора
F 1.4 – підготовка реалізації маршруту
F 1.4.1– замикання стрілочних і без стрілочних секцій по трасі маршруту
F 1.4.2 – формування команди на переведення стрілки
F 1.4.3 – формування команди на включення світлофора
F 1.4.4 – відповідності свідчення світлофора
F 1.5 – реалізація маршруту
F 1.5.1– відкриття сигналу світлофора
F 1.5.2 – перевід вістряків стрілки
F 2 – Відміна поїзних і маневрових маршрутів
F 2.1 – перевірка категорії маршруту
F 2.2 – включення витримки часу
F 2.3 – перевірка відсутності поїзда на маршруті або ділянках наближення
F 3 – посилку відповідальних команд для управління об'єктами при виникненні несправностей;
F 3.1 – допоміжний перевід стрілок при помилкової зайнятості секції;
F 3.2 – допоміжну зміну напрямку руху на перегоні;
F 3.3 – дачу штучного прибуття при напівавтоматичному блокуванні (ПАБ);
F 3.4 – штучне розмикання секцій;
F 3.5 – відкриття запрошувального сигналу;
F3.6 – відкриття переїзду;
F3.7 – додаткове розмикання стрілок без установки маршрутів;
F 4 – автоматичне повторення установки заданого маршруту у відповідності з проектом (автодію);
F 5 – установку маршрутів відправлення господарським поїздам з виїздом їх на перегін по ключу-жезлу з поверненням назад;
F6 – ув'язка з суміжними системами;
F6.1 – ув'язку з пристроями автоблокування (АБ), напівавтоматичного блокування (ПАБ), диспетчерської централізації (ДЦ) або диспетчерського контролю (ДК);
F6.2 – ув'язку з пристроями ЕЦ сусідньої станції при відсутності перегону між ними (у тому числі при наявності кордону по приймально-відправних коліях);
F6.3 – ув'язку з пристроями маневрових районів і гіркової централізації (ГАЦ), і т.д. у відповідності з проектом;