

Kinematika_slozhnogo_dvizhenia_tochki
.pdfНаправление вектора arτ определено при построении многоугольника ускорений (см. рис. 10); направление круговой стрелки
ε |
e |
– в соответствии с направлением вектора a τ |
по отношению к |
|
|
|
e |
|
|
оси вращения стержня O1z1 (εe |
см. рис. 8). |
|
||
Вычислим абсолютные скорость и ускорение точки М. Подвижная и неподвижная системы координат те же, что и для точки D. Относительное движение точки М – криволинейное ее движение вдоль трубки 3, переносное движение – вращение трубки вместе с пластиной (переносящей и точку М) вокруг оси O1z1. Для
переносного движения уже известны угловые скорость и ускорение при t = 1 c.
Закон относительного движения точки М имеет вид
M0М = Sr = π2 rt2 ; он позволяет определить положение точки М в
трубке 3 при t = 1 c:
M0M |
|
t =1c |
= |
π |
r 12 = |
πr |
м, |
ϕ |
|
t =1c |
= |
|
M0M |
t=1c |
= |
π |
рад. |
|||||||
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
2 |
2 |
|
|
|
|
r |
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
Абсолютная скорость точки М равна V |
=Vr +Ve |
(индекс точки |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М опускаем). Относительная скорость V |
|
= S |
|
|
|
при t = 1 c |
||||||||||||||||||
|
r |
= πrt |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
V |
|
t=1 c |
= S |
r |
= πr 1 м/с, r = b = 2 м, |
V = 6, 28 м/с> 0. |
||||||||||||||||||
|
||||||||||||||||||||||||
r |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|||||
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|||
Вектор относительной скорости направлен по касательной к трубке в сторону роста Sr .
Переносная скорость точки М равна Ve = ωe KM , KM = r =b,
Ve =1 2 = 2 м/с. Вектор Ve = ωe ×KM (Ve KM и направлен по отрицательному направлению оси x) (рис. 11).
Определим проекции на оси x, y, z1 абсолютной скорости точки М:
V |
x |
= −V , V |
y |
= 0, V |
z1 |
= −V ; V = V |
2 +V 2 |
+V 2 |
, |
|||
|
e |
|
|
r |
x |
y |
z |
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
Vx = −2 м/с, |
|
Vy = 0, |
Vz |
= −6, 28 м/с, |
|
V = 6,6 м/с. |
||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Абсолютное ускорение точки М:
20
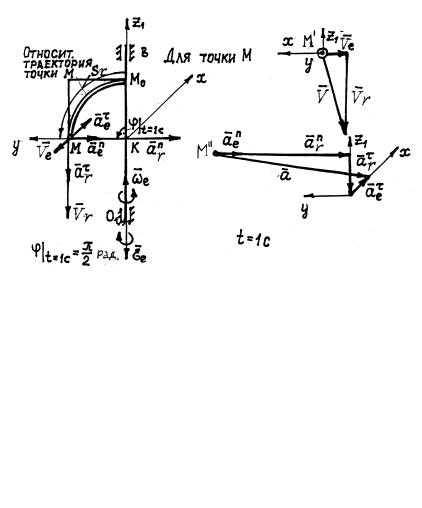
a = arn + arτ + aen + aeτ + aK .
Нормальная и касательная составляющие относительного ускорения точки М:
arn = Vrr2 , arτ = Sr = πr,
arn = 6, 282 2 =19,7 м/с2 , arτ = 6, 28 м/с2 > 0.
Вектор arn направлен к центру кривизны относительной траектории – точке K, величина ускорения arτ положительна, поэтому век-
тор arτ направлен по касательной к относительной траектории точки М в сторону роста Sr.
Рис. 11
Нормальная и касательная составляющие переносного ускорения точки М:
an = ω2 |
KM , aτ |
= ε |
e |
KM ; |
|
e |
e |
e |
|
|
|
an =12 |
2 = 2 м/с2 , aτ = 4 2 =8 м/с2. |
||||
e |
|
e |
|
|
|
21
Вектор a n направлен к оси вращения пластины и трубки O z |
||||||||||
e |
|
|
|
|
|
1 1 |
||||
перпендикулярен ей, вектор |
a τ = ε × |
|
(вектор |
a τ |
|
|
||||
KM |
KM |
|||||||||
|
|
|
e |
e |
e |
|||||
направлен по положительному направлению оси x). |
|
|
|
|||||||
Вектор кориолисова ускорения точки М: |
|
|
|
|||||||
|
|
|
|
|
|
|
n |
|
|
|
aK = 2(ωe ×Vr ); |
|
|
|
|
|
|
|
|||
aK = 2ωeVr sin(ωe ,Vr ); |
|
|
|
|||||||
n |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(ωe ,Vr ) = π, sin(ωe ,V r ) = 0, aK = 0. |
|
|
|
|||||||
и
и
Определим проекции на оси x, y, z1 абсолютного ускорения точки М:
a |
x |
= aτ, a |
y |
= −an −an , a |
z |
= −aτ; |
||
|
e |
|
e |
r |
r |
|||
|
|
|
|
|
|
|
1 |
|
ax =8 м/с2, ay = −2 −19,7 = −21,7 м/с2, |
az = −6,28 м/с2; |
|||||||
|
|
|
|
|
|
|
|
1 |
|
|
a = |
ax2 + a2y + az2 |
; a = 23,3 м/с2. |
||||
|
|
|
|
|
1 |
|
|
|
Пример 3. По неподвижной проволочной полуокружности 1
(рис. 12) по закону S = π6R t2 м движется кольцо D, через которое
проходит трубка 2, вращающаяся вокруг оси O(z1), перпендикулярной плоскости рисунка. В трубке 2 движется точка М по закону
M0M = 0, 2t2 м.
Вположении механизма при t = 1 c, указанном на рис. 13, оп-
ределить, принимая кольцо D за точку: 1) угловые скорость и ускорение трубки 2, относительные (по отношению к трубке 2) скорость и ускорение точки D; 2) абсолютную скорость и ускорение точки М. Принять R = 0,2 м, OA = 0,8 м, H = 0,2 м, [t]=c.
Решение. 1. Связав подвижную систему отсчета Oxy с трубкой ОА, представим абсолютное движение точки D по окружности 1 как сумму двух движений – прямолинейного относительного по трубке ОА и переносного – вращения трубки ОА (переносящей точку D) вокруг оси O(z1). Положение точки D при t = 1 c:
S |
|
t=1 c = πR |
м, ψ = π |
рад. Абсолютные скорость и ускорение точ- |
|||||||
|
|||||||||||
|
|
6 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ки D (см. рис. 13): |
|
|
|
|
|
|
|
|
|||
|
|
V |
= S = πR t, V |
|
t=1 c |
= 0, 209 м/с; a |
D |
= a τ |
+ a n |
; |
|
|
|
|
|||||||||
|
|
Dτ |
3 |
Dτ |
|
|
D |
D |
|
||
|
|
|
|
|
|
|
|
||||
22

Рис. 12 Рис. 13
aτ |
=V |
= S = πR = 0, 209 м/с2 ; |
|||||||
D |
Dτ |
|
|
|
|
3 |
|
|
|
|
|
|
|
V 2 |
|
|
|
||
|
|
|
|
|
π2R |
|
|
||
|
an |
|
= |
|
D |
= |
|
t2 |
; |
|
|
|
R |
9 |
|||||
|
D |
|
|
|
|
|
|||
aDn t=1 c = 0, 219 м/с2.
Относительную и переносную скорости определим из уравнения VD =Vr +Ve , спроецировав его на оси x и y (рис. 14):
Vr =VD cos 60D, Vr = 0,105 м/с, Ve =VD cos30D, Ve = 0,181 м/с.
Тогда при t = 1 c угловая скорость трубки 2
ω = |
Ve |
|
, где OD = 2R cos30D, OD = 0,346 м, |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
e |
OD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ωe = 0,52 рад/с; направление круговой стрелки |
|
|
|
|
||||||||||||||||||||||||
ωe |
|
соответствует |
вращению |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
вектора Ve |
|
|
|
Рис. 14 |
|||||||||||||||||||||||
вокруг оси O(z1) |
(см. рис. 13). Ускорение точ- |
|
|
|
||||||||||||||||||||||||
ки D в сложном движении запишем в виде |
|
|
|
|
||||||||||||||||||||||||
|
|
|
a |
D |
= a + an + a τ + a |
K |
, a |
D |
= a τ + a n |
, |
||||||||||||||||||
|
|
|
|
|
|
r |
|
|
e e |
|
|
|
|
D |
|
|
D |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где an = ω2 OD, |
an = 0,095 м/с2 ; |
a |
|
|
|
); |
|
|||||||||||||||||||||
K |
= 2(ω ×V |
|
||||||||||||||||||||||||||
|
e |
|
e |
|
e |
|
|
|
|
|
|
|
|
|
|
|
e |
r |
|
|||||||||
23

|
|
|
|
|
|
|
|
ω , |
a |
|
|
= 2ω V sin 90D, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
V |
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
r |
|
|
e |
|
|
|
|
|
|
e |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
aK = 0,11 м/с2 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Относительное a |
r |
= a |
τ |
(a n |
= 0) и |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
переносное |
касательное |
|
|
a |
τ |
уско- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
рения определяются методом проек- |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ций (рис. 15) на оси x и y |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
соответственно: |
|
|
|
|
|
|
|
|
|
|
||||||||||||
Рис. 15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
aDτ cos30D + aDn cos 60D = |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= a |
K |
+ aτ, |
aτ = 0,185 м/с2 ; |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
e |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aτ |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
aτ |
= ε |
e |
OD; |
ε |
e |
= |
|
e |
; |
ε |
e |
= 0,52 рад/c |
; |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
e |
|
|
|
|
|
|
|
|
|
OD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
aτ sin 30D −an |
cos30D = a |
−an , |
a |
= 0,01 м/с2 ; |
|
|
|
|||||||||||||||||||||||||||
D |
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
r |
|
|
|
|
e |
r |
|
|
|
|
|
|
|
|
|
|
|
|
направление |
круговой |
стрелки |
|
εe |
|
|
|
|
соответствует |
|
|
вращению |
||||||||||||||||||||||
вектора a τ (см. рис. 13) вокруг оси O(z ). |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
Для проверки полученных выше уравнений используем анали- |
||||||||||||||||||||||||||||||||||
тическое описание геометрии механизма (см. рис. 13); имеем |
||||||||||||||||||||||||||||||||||
ϕ = π + |
S |
, ϕ |
|
t =1c |
= 60D, |
|
ϕ = ω = |
S |
, ϕ = ε |
e |
= |
S |
|
; |
|
|||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
4 |
|
2R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
2R |
|
|
|
|
|
2R |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
при t = 1 c ω |
= 0,52 рад/с, ε |
e |
|
= 0,52 рад/с2. Для точки D |
|
|
|
|||||||||||||||||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
= S cos ϕ, |
V |
|
t=1 c |
= |
S |
|
|
|
|
= 0,105 м/с; |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
ry |
|
|
|
|
|
|
|
ry |
|
|
2 |
|
t=1 c |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
arτ =Vry = S cos ϕ− Sϕsin ϕ, arτ t=1c = 0,01 м/с2.
|
|
|
|
|
, a |
= a τ = a . |
|
Здесь V |
=V |
||||||
|
r ry |
r |
r |
ry |
|||
2. Определим абсолютные скорость и ускорение точки М (см. рис. 12). Относительное движение точки М – прямолинейное по трубке 2, переносное движение – вращение трубки 2. Для точки М
при t = 1 c M0M t=1 c = 0, 2 м, расстояние OM =OA − M0M = 0,6 м.
24

В |
относительном |
движении (рис. |
16) |
|
обозначим |
(Vr )Sr =Vr , |
|||||||||
(a |
) |
Sr |
= aτ, |
тогда |
|
|
|
|
|
|
|
|
|
||
r |
|
r |
|
|
|
|
|
= S , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
r |
= M |
0 |
M = 0, 2t2 , V |
= 0,4t, V |
|
t =1c |
= 0, 4 |
м/с; |
|||
|
|
|
|
||||||||||||
|
|
|
|
|
|
r |
|
r |
|
|
|
||||
|
|
|
|
|
aτ = S |
= 0,4 м/с2 = const |
(a n |
= 0), a |
= a |
τ. |
|||||
|
|
|
|
|
r |
|
r |
|
|
r |
|
|
r |
r |
|
Рис. 16
|
В |
|
переносном |
|
|
движении |
известны |
|
ωe = 0,52 рад/с, εe = |
|||||||||||||||||||||||||||
= 0,52 рад/с2. |
|
|
|
|
Тогда |
V = ω OM , V = 0,52 0,6 = 0,312 м/с, |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
e |
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a = |
a n |
+ a τ, |
|
|
an |
= ω2 OM , an |
= 0,522 0,6 |
= 0,162 м/с2 , |
aτ = |
|||||||||||||||||||||||||||
e |
|
e |
|
e |
|
|
|
|
e |
|
|
|
e |
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|||
= 0,52 0,6 = 0,312 м/с2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Абсолютная скорость точки М равна V |
M =Vr +Ve. Так как в |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нашем случае |
|
|
|
|
|
|
|
= |
V 2 |
+V 2 , |
V |
= |
0,3122 +0, 42 = |
|||||||||||||||||||||||
V |
V , то V |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
r |
|
M |
|
e |
r |
|
M |
|
|
|
|
|
|
|
|
|
|
|
||||
= 0,51 м/с2 (рис. 17). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Абсолютное |
ускорение |
точки |
М запишем |
|
|
в виде |
aM = |
||||||||||||||||||||||||||||
= a + an + a τ + a |
K |
, |
|
где a |
K |
= 2ω V sin 90D, a |
K |
= 0, 416 м/с2. |
||||||||||||||||||||||||||||
|
r |
|
e |
|
e |
|
|
|
|
|
|
|
|
|
|
e |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25

Вектор абсолютного ускорения построен на рис. 18. Получим его проекции на подвижные оси х и у и определим величину:
aMx = aeτ −aK , aMx = −0,038 м/с2 ; aMy = −aen −ar , aMy = −0,562 м/с2 ;
Рис. 17 |
aM = aMx2 + aMy2 , aM = 0,57 м/с2. |
Проверим расчеты для точки М. Воспользуемся аналитическими выражениями для координат точки М в неподвижной системе
отсчета Ox1 y1(z1) (см. рис. 16):
x1M = −OM cos ϕ= −(l − Sr ) cos ϕ,
где l = OA,
y1M = OM sin ϕ = (l − Sr )sin ϕ.
|
|
|
|
|
|
|
|
|
|
|
|
Абсолютную |
|
|
|
|
скорость |
|
|
|
точки М |
||||||||||||
|
|
|
|
|
|
|
|
|
V |
|
= |
|
x2 |
+ y2 |
|
|
|
|
вычисляем |
|
|
с |
помощью |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
1M |
|
1M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
выражений |
|
|
|
|
|
|
|
)ϕsin ϕ+ S |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
= (l − S |
r |
|
|
cos ϕ; |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1M |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|||
Рис. 18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
= (l − S |
r |
)ϕcos ϕ− S |
r |
sin ϕ, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2 |
ϕ |
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|||
тогда V = (l − S |
r |
) |
|
|
|
+ S |
r |
. |
Учитывая, что ϕ = |
|
|
, |
получаем |
||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
l − Sr |
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
VM = |
|
|
|
2R |
|
|
|
|
S |
+ Sr |
, VM |
t =1 c = 0,51 м/с. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
М aM = |
|
x12M + y12M , опуская |
||||||||||||||||||||
Абсолютное |
ускорение точки |
|
|||||||||||||||||||||||||||||||
подробные выкладки, записываем в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
l − Sr 2 |
|
|
|
|
2 |
||||||||||||
aM = |
|
|
|
(l |
− Sr )S |
−2Sr S |
|
+ |
|
|
|
|
|
|
S |
|
+ Sr |
|
, |
||||||||||||||
4R |
2 |
|
|
|
4R |
2 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
t =1 c = 0,57 м/с2 . |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
26
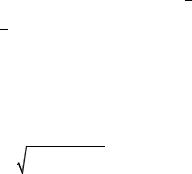
Пример 4. В кривошипно- |
|
||
ползунном механизме (рис. 19) |
|
||
кривошип |
1 вращается |
вокруг |
|
оси O(z ) |
по закону ϕ = πt2 рад. |
|
|
1 |
4 |
|
|
|
|
||
По шатуну 2 движется шайба М |
|
||
по закону |
M0 M = 0,1t2 |
м. Для |
|
положения механизма при |
t = 1 c |
Рис. 19 |
|
(рис. 20): 1) найти, связав подвиж- |
|||
ную систему отсчета Oxy |
с кри- |
|
|
вошипом 1, относительные скорость и ускорение точки В шатуна 2 (B(2) ); 2) определить, принимая шайбу М за точку, ее
абсолютные скорость и ускорение. Принять OA = AB =l = 0, 4 м, [t] = c.
Рис. 20
Решение. 1. Найдем для кривошипа 1 угловые скорость и ус-
корение при t = 1 c, когда |
ϕ= π |
рад (см. рис. 20): |
||||
|
|
|
4 |
|
|
|
ω = ϕ |
= πt > 0, |
|
=1,57 рад/с; |
|||
ω |
t =1c |
|||||
1 |
2 |
|
|
1 |
|
|
|
|
|
|
|
рад/с2, |
|
|
ε = ω |
= ϕ |
=1,57 |
|||
|
1 |
1 |
|
|
|
|
где ω1 > 0, ε1 > 0, поэтому круговые стрелки  для ω1 и ε1 (см. рис. 20) направлены в сторону увеличения угла ϕ.
для ω1 и ε1 (см. рис. 20) направлены в сторону увеличения угла ϕ.
27

При OA = AB AOB = ABO, т. е. если ϕ1 = −ϕ2 , то ϕ1 = −ϕ2
или |
|
ω |
|
= |
|
ω |
|
=1,57 рад/с и ϕ |
= −ϕ |
2 |
или |
|
ε |
|
= |
|
ε |
2 |
|
=1,57 рад/с2 . |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
1 |
|
|
|
2 |
|
1 |
|
|
|
1 |
|
|
|
|
|
|
Таким образом, и для шатуна при t = 1 с известны ω2 и ε2 .
Определим абсолютные скорость и ускорение точки В шатуна 2, записав ее координаты в неподвижной системе отсчета
Ox1 y1(z1) : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= x1B = −2l sin ϕ ϕ; |
|||||||||
|
|
|
x1B = 2l cos ϕ, |
y1B = 0; |
|
VBx |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
|
|
VBx |
|
t =1c = −0,89 м/с, |
|
|
|
|
|
|
|
VBx |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
VB |
= |
= 0,89 м/с; |
||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
a |
|
|
|
|
, a |
|
|
|
x |
= −2lϕ2 cos ϕ−2lϕsin ϕ; |
||||||||||||||
|
|
|
B |
|
= |
a |
Bx |
Bx |
|
= |
|||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aBx |
|
t =1 c = −2 |
0, 4(1,572 |
2 |
+1,57 |
|
|
|
2 |
) = −2, 28 м/с2 , |
|
aB |
|
=2, 28 м/с2. |
|||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Найдем относительные (по отношению |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
к кривошипу 1) скорость и ускорение точки |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
В шатуна 2 |
(В(2) ), рассматривая ее дви- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
жение как сложное. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
При этом переносным движением для |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
точки |
В(2) |
будет вращение вокруг оси |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
O(z1) |
кривошипа 1 с угловыми скоростью |
||||||||||||||||
|
|
|
Рис. 21 |
|
|
|
|
и ускорением |
|
|
|
|
|
= ε =1,57 рад/с2 . |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
= ω =1,57 рад/с, ε |
e |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ve =ω1 OB =ω1 2l cos ϕ, Ve |
|
t =1c = |
||||||||||||||||||
VB =V(B |
|
) =Vr +Ve , |
где |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= 0,89 м/с. |
|
|
|
Поскольку |
|
|
|
|
|
V = |
|
|
V 2 |
+V |
2 = |
1,25 м/с |
|||||||||||||||||||||||||
|
|
|
V |
V , то |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
B |
r |
|
|
|
e |
|
|
B |
|
|
|
|
|
|
|
|||||
(рис. |
21). |
|
Теорема Кориолиса имеет вид a |
B |
= a |
r |
+ a n + a τ |
+ a |
K |
, |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
e |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где переносное и кориолисово ускорения равны |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
an = ω2 OB, |
an =1,572 0, 4 |
2 =1,39 м/с2 ; |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
e |
|
1 |
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
aτ |
= ε OB, |
aτ =1,57 0, 4 |
2 = 0,89 м/с2 ; |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
e |
|
1 |
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28
a |
|
|
|
), |
a |
|
= 2ωV sin 90D |
, a |
|
= 2 1,57 1, 25 =3,94 м/с2 . |
K |
= 2(ω ×V |
K |
K |
|||||||
|
e r |
|
1 r |
|
|
|||||
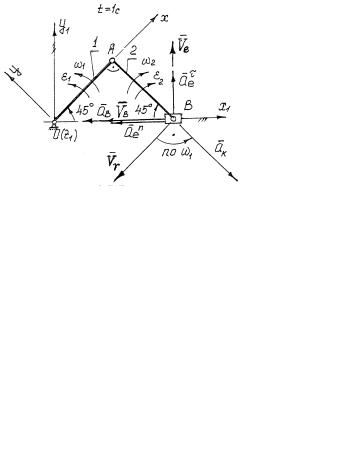
Получив уравнения проекций абсолютного ускорения aB на подвижные оси х и у (рис. 22), определим arx и ary :
−a |
B |
cos 45D |
= a |
rx |
−an cos 45D + aτ cos 45D, |
a |
rx |
= −1, 25 м/с2 ; |
|
|||||||
|
|
|
|
|
|
|
e |
|
e |
|
|
|
|
|||
a |
B |
cos 45D |
= a + an cos 45D + aτ cos 45D −a |
K |
, |
a =3,94 м/с2 |
; |
|||||||||
|
|
|
|
|
|
ry |
|
e |
|
e |
|
|
ry |
|
||
|
|
|
|
a |
r |
= |
a2 |
+ a2 |
= |
1, 252 +3,942 = 4,12 м/с2. |
|
|||||
|
|
|
|
|
|
|
rx |
ry |
|
|
|
|
|
|
|
|
Рис. 22
2.Проверим результаты п. 1. Получим относительные скорость
иускорение точки В(2), записав ее координаты в подвижной системе отсчета (рис. 23):
xB =OA + AB cos 2ϕ =l(1 +cos 2ϕ), yB = −ABsin 2ϕ = −l sin 2ϕ;
|
|
Vrx = xB = −2l ϕsin 2ϕ, Vry = yB = −2lϕcos 2ϕ; |
|
||||||||||
V = |
(V |
|
)2 |
+(V |
)2 = 2lϕ, V |
|
t =1c |
= 2 0, 4 1,57 =1, 25 м/с; |
|||||
|
|
||||||||||||
r |
|
rx |
|
ry |
r |
|
|
|
|
|
|
||
a |
rx |
= x |
= −4lϕ2 cos 2ϕ−2lϕsin 2ϕ, |
a |
|
t =1c |
= −1, 25 м/с2 |
; |
|||||
|
|||||||||||||
|
B |
|
|
|
|
|
|
rx |
|
|
|
||
29